








AGVにおける動的経路計画アルゴリズムの解明
_%E7%94%BB%E6%9D%BF%201.avif)
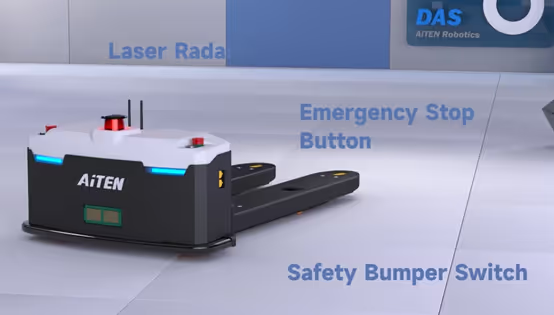
現代の倉庫管理、ロジスティクス、製造業では、自動搬送車(AGV)がますます一般的になってきている。勤勉な働きアリのように、AGVは複雑な環境を自律的にナビゲートし、マテリアルハンドリングのタスクを効率的にこなします。AGVのインテリジェントナビゲーションを可能にするコア技術の1つは、経路計画である。特に環境が静的でない場合、動的なパスプランニング機能が重要になる。この記事では、いくつかの主流な動的経路計画アルゴリズム(A、ダイクストラ、RRTなど)を掘り下げ、それらがAGV業界でどのように大きなインパクトを与えているかを説明する。
なぜダイナミック・パス・プランニングが必要なのか?
従来の静的経路計画は、AGVがタスクを実行している間、環境が完全に既知であり、変化しないことを前提としている。しかし、現実の世界は変化に富んでいます:
- 突然現れる一時的な障害物(荷物の落下、歩行者、他の車両など)
- 交通規制区域の変更
- ターゲットポイントやタスクの一時的な調整
このような状況では、AGVはリアルタイムで環境の変化を感知し、迅速に経路を再計画する必要がある。そこで活躍するのが動的経路計画です。AGVに状況の変化に適応するインテリジェンスを与えることで、複雑でダイナミックな環境でも安全かつ効率的に稼働し続けることができます。
主流経路計画アルゴリズムの分析
1.ダイクストラのアルゴリズム
ダイクストラのアルゴリズムは、単一のソース・ノードからグラフ内の他のすべてのノードへの最短経路を見つけるために使用される古典的なグラフ探索アルゴリズムである。
コア・アイデア:
ソース・ノードからスタートし、アルゴリズムは水の波紋のように外側に広がっていく。毎回、ソース・ノードに最も近い未訪問ノードを訪問し、その隣接ノードとの距離を更新する。
プロセス:↪Cf_200D
- 初期設定:始点からの距離を0に設定し、他の点からの距離を無限大に設定する。訪問するノードの優先キューを作成する(距離でソート)。
- 反復:キューから距離が最小のノードuを取り除く。
- 緩和:uの各近傍vについて、uからvへのパスがより短い場合、vの距離を更新し、キューに追加する。
- マーク:uを訪問済みとしてマークする。
- 繰り返し:ターゲット・ノードが検索されるか、キューが空になるまで続ける。
AGVのアプリケーション:
- 利点(エッジの重みが負でない場合に)大域的な最短経路を見つけることが保証される。
- 短所探索範囲が広い、方向性がない、計算効率が低い(特に大きなマップ)。動的な障害物はグローバルパスを再計算する必要があり、リアルタイム性が低い。
- ポジショニング:他のアルゴリズム(A*など)の基礎として、あるいは単純な環境で使われることが多い。
2.A*アルゴリズム
A*(A-Star)アルゴリズムは、ダイクストラ・アルゴリズムの最適化である。探索方向を導くためにヒューリスティック情報を導入し、より速く目標を見つける。
核となる考え方次に訪問するノードを選択するとき、以下のことを同時に考慮する:
- g(n):出発点からノード n までの実際の経路コスト。
- h(n):ノードnからゴールまでの推定コスト(マンハッタン/ユークリッド距離などの発見的関数)。
- 評価関数: f(n) = g(n) + h(n)
- 主な要件:h(n)は、許容性(推定値≦実際の値)と、最適解を確実に見つけるための一貫性を満たさなければならない。
プロセス: ダイクストラと似ているが、優先順位キューはf(n)でソートされ、f(n)が最小のノードが優先的に拡張される。
AGVのアプリケーション:
- 利点ヒューリスティック関数が条件を満たす場合に最適経路を保証し、通常ダイクストラよりもはるかに効率的。AGVのグローバル経路計画に広く利用されている。
- 欠点:性能はヒューリスティック関数の選択に左右される。メモリ消費量が多くなる可能性がある。環境が頻繁に変化する場合、再計画が必要となる。
- 動的なバリエーション:動的な環境に対応するために、D*、LPA*、D* Lite などのアルゴリズ ムが用意されている。これらのアルゴリズ ムは、環境が変化したときに(完全に再計算するのではなく)経路をインクリメンタ ルに更新できるため、応答速度が大幅に向上します。D* Liteは、AGVの動的障害物回避によく使用されるアルゴリズムです。

3.RRT*アルゴリズム
RRT* (Rapidly-exploring Random Tree Star) は、サンプリングに基づく経路計画アルゴリズムで、特に高次元空間や複雑な制約条件(車両の運動学など)に適しています。
核となる考え:
状態空間内の点をランダムにサンプリングすることで、アルゴリズムは原点か ら出発して徐々に木を成長させ、空間を探索する。RRT*はRRTの最適化バージョンであり、経路が漸近的に最適に近づく(サンプリング点が多いほど経路は最適に近づく)ように再配線ステップを組み込んでいる。
プロセス
- サンプリング:状態空間内の点x_randをランダムに生成する。
- 最近接ノードを見つける:ツリーの中で x_rand に最も近いノード x_nearest を見つける。
- エクステンド(ステア):x_nearestからx_randまで(障害物を避けて)ステップ長を延長し、新しいノードx_newを得る。
- 親ノードを選択する(RRT*固有):x_new近傍のノードを探索し、始点からx_newまでの総経路コストを最小にするノードx_minを親ノードとして選択する(衝突は避けなければならない)。
- Rewire (RRT*専用):x_newに近いノードを探す。x_new を経由して接続することで、そのノードの総経路コストが減少する場合、そのノードの親ノードを x_new に更新する。
- 追加する:x_newとその接続エッジをツリーに追加する。
- 繰り返し:ツリーがターゲットエリアの近くまで拡大するまで続ける。
AGVのアプリケーション:
- 利点高次元の状態(姿勢、速度など)と複雑な制約を扱う強力な能力、明示的な環境マップが不要、確率的完全性(パスが存在すれば、最終的には見つかる)、RRTの漸近最適性。
- 短所パスは厳密には最適ではない(無限サンプリングを使用しない限り);パスは滑らかでない場合がある(後処理が必要);性能はパラメータに敏感;収束が遅い場合がある。
- 動的なバリエーション:例えば、動的RRT。これは、動的な障害物に衝突するツリーの一部を削除/更新し、成長を続けることで再計画を実現する。

AGVにおける動的経路計画の実用化
AGV障害物回避アプリケーションシナリオ
実際のAGVアプリケーションでは、単一のアルゴリズムが単独で使用されることはまれであり、代わりに、アルゴリズムの組み合わせが一般的に採用される:
1.グローバル・パス・プランニング:
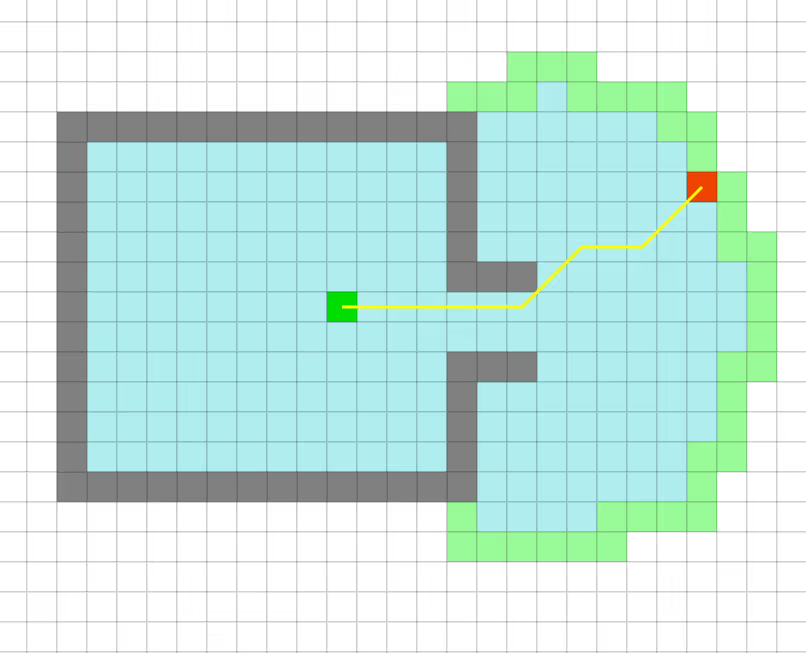
A*やその亜種(D-Liteなど)、場合によってはダイクストラ・アルゴリズムの最適化版を使って、出発点から目的地までの大域的な最適パスまたは準最適パスを既知の地図上で計画する。この経路は通常、非常にマクロなレベルである。
2.ローカル・パス・プランニング/動的障害物回避:
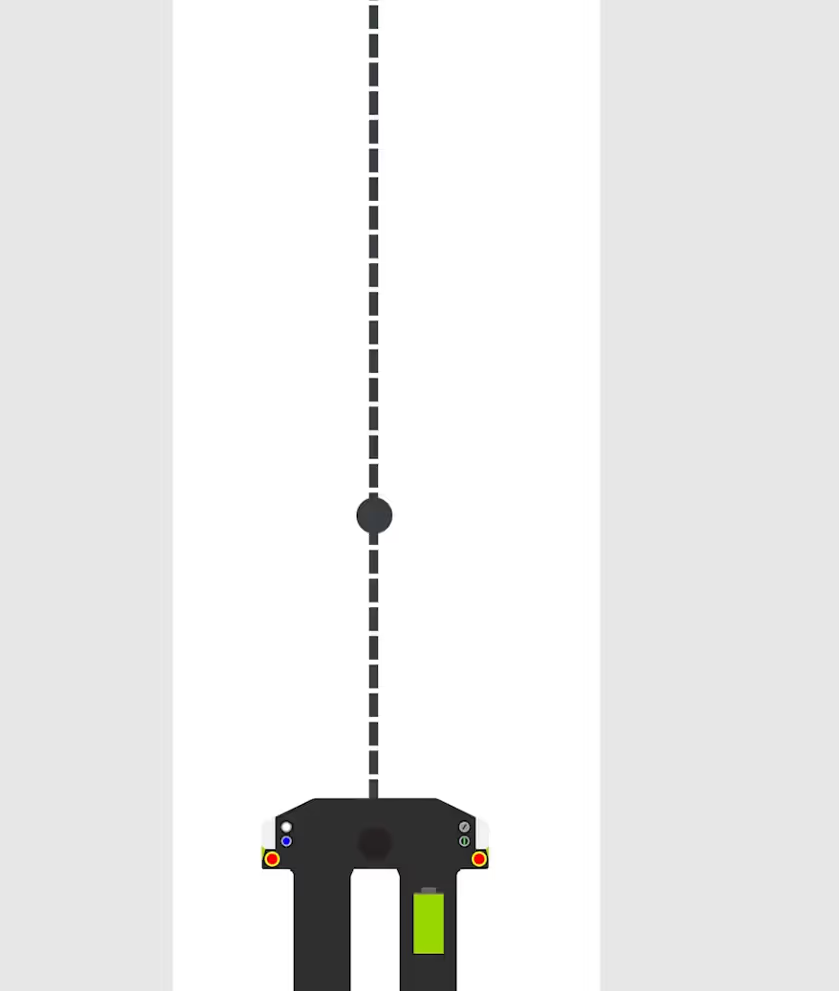
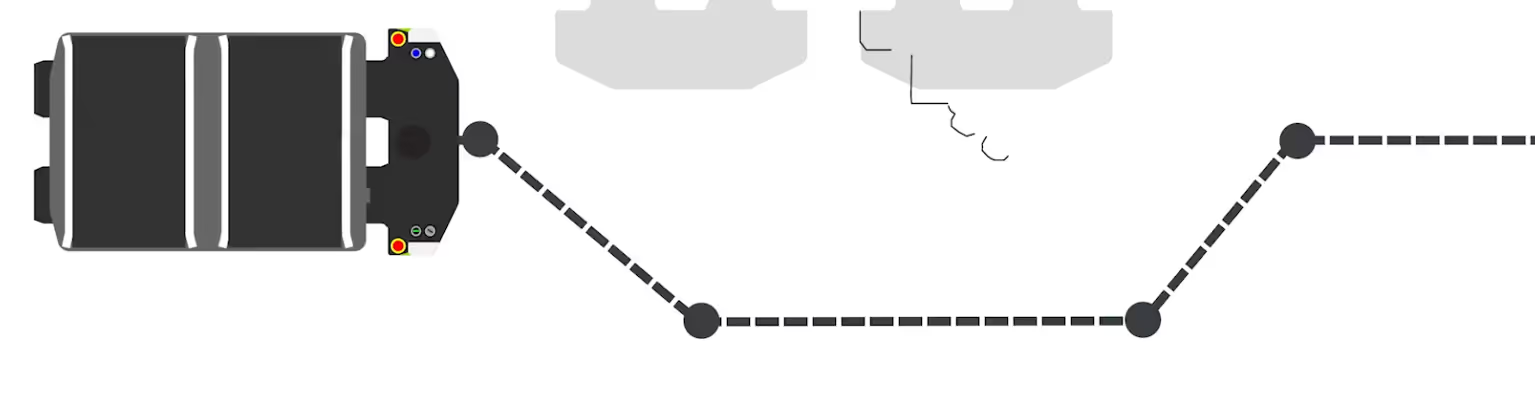
グローバル経路をたどる間、AGVはセンサー(ライダーやカメラなど)を使って周囲の環境を継続的に感知する。予期せぬ障害物(静的または動的)が検出されると、ローカルプランナー(DWA - Dynamic Window Approach、TEB - Timed Elastic Band、または高速リプランニングを備えたA/RRTの変形に基づく場合がある)が介入して、グローバルパスのガイダンスの下で、短期的で安全な、車両運動学的に制約されたローカル障害物回避経路を生成する。

3.経路追跡:
制御アルゴリズムは、計画された経路に沿ってAGVを正確に駆動する責任を負う(大域的か局所的かを問わない)。
この階層的なプランニング戦略は、グローバルな最適性とローカルなリアルタイム性能のバランスをとる。D Liteのようなアルゴリズムは、その効率的なインクリメンタル再計画機能により、局所的な動的変化の処理に優れている。一方、RRTとその亜種は、複雑な環境や運動制約を扱うのに有利である。
課題と今後の動向
1.課題
動的経路計画技術は大きく進歩したが、AGV産業への応用には課題が残っている:
- リアルタイム要件:特に高速運転や高密度のトラフィックシナリオでは、アルゴリズムはミリ秒単位で計算を完了する必要がある。
- 環境の不確実性:センサーノイズ、測位誤差、動的障害物の予測困難。
- マルチAGVコーディネーション:コンフリクトやデッドロックを回避し、効率的なコラボレーションを実現。
- 複雑な運動制約:AGVのサイズ、旋回半径、加減速性能を考慮。
2.今後の動向
今後、ダイナミック・パス・プランニングは、よりスマートで効率的なソリューションへと進化していくだろう:
- 機械学習の統合:強化学習、模倣学習、その他の手法を活用し、AGVが最適なナビゲーション戦略を自律的に学習できるようにする。
- 予測プランニング:他の動的障害物(歩行者や車両など)の意図や軌道を予測し、事前に計画を立てる。
- 意味的理解:AGVが環境の意味的情報(「歩道」や「充電ゾーン」など)を理解し、シナリオに適した意思決定を行えるようにする。
- 人間と機械のコラボレーション人間と機械の共存環境において、より安全で自然な相互作用と回避を実現する。
まとめ
ダイクストラ、A、RRT、およびそれらの動的変形は、AGVの動的経路計画アルゴリズムライブラリのコアツールです。これらはAGVの「インテリジェントな目」と「ダイナミックなステアリングホイール」として機能し、複雑な環境を柔軟かつ効率的にナビゲートすることを可能にします。これらのアルゴリズムの原理と特性を理解することは、AGV技術と、より広範なオートメーション分野を発展させるために極めて重要です。アルゴリズムが進化し、計算能力が向上するにつれて、将来のAGVは間違いなく、より賢く、より信頼性が高く、より効率的になっていくだろう。
中国・蘇州に本社を置くAiTEN Robotics社は、自律型産業車両(AMR/AGV)と物流自動化ソリューションの世界的リーダーである。AiTEN Roboticsは、フルスタックのマテリアルハンドリングシナリオのニーズを満たす10の製品シリーズを開発した。AiTEN Roboticsは30を超える国と地域で200を超えるプロジェクトを展開しており、自動車、食品・飲料、化学、医薬品、製造、サードパーティー・ロジスティクスなどの業界において、フォーチュン500に名を連ねる数多くの企業から信頼され、オペレーションの安全性、効率性、将来の即応性を高めている。

