








AGVパレットハンドリングによるピック&プレース経路計画技術の分析
_%E7%94%BB%E6%9D%BF%201.avif)
.avif)
AGVの正確なパレットピッキングと配置は、高度なパスプランニング技術に依存しています。このタスクでは、衝突のない経路だけでなく、パレットに接近する際の高精度な姿勢とスムーズな軌道が要求される。この記事では、ハイブリッドAやベジエ曲線の協調適用など、この目標を達成するためのコア技術を分析する。
なぜパレット・ハンドリングには特別なパス・プランニングが必要なのか?
課題
- 最後まで高精度にフォークは、パレットフォークの穴とセンチメートル/ミリメートルの精度で位置合わせされ、厳しい駐車方向の要件を満たす必要があります。
- 強い移動制約:特に狭いスペースでは、AGVの寸法、最小回転半径、非完全な制約(横方向への移動禁止)を厳守する必要があります。
- 経路のスムーズさ:貨物の安定性と作業の安全性を確保するため、急加速、急減速、急旋回を避ける。
- 近端高精度障害物回避:未知の障害物や位置決めエラーに対処するため、パレットに接近する際には高精度のセンシングが必要です。
テクニカル分析
1.グローバル経路計画
テクノロジーダイクストラ、スタンダードA
機能グローバルグリッドマップ上に、スタート地点からトレイエリアまでの一般的なパス(接続済み、低コスト)を素早く生成します。
特徴高速、運動学的な詳細を無視。
2.終点ファインパス計画
コアテクノロジー:ハイブリッドA
利点連続状態空間(x, y, θ)を探索し、車両運動学モデル(自転車モデルなど)を直接組み込む。
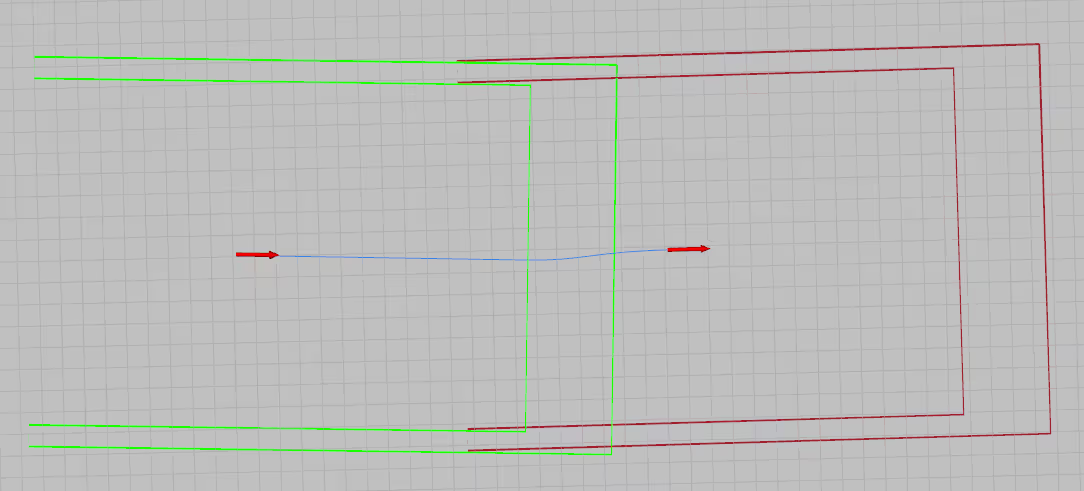
効果正確な目標姿勢(x, y, θ)に到達し、旋回半径などの制約に適合する実現可能な経路を生成し、「最後の1メートル」における複雑な旋回問題を解決する。
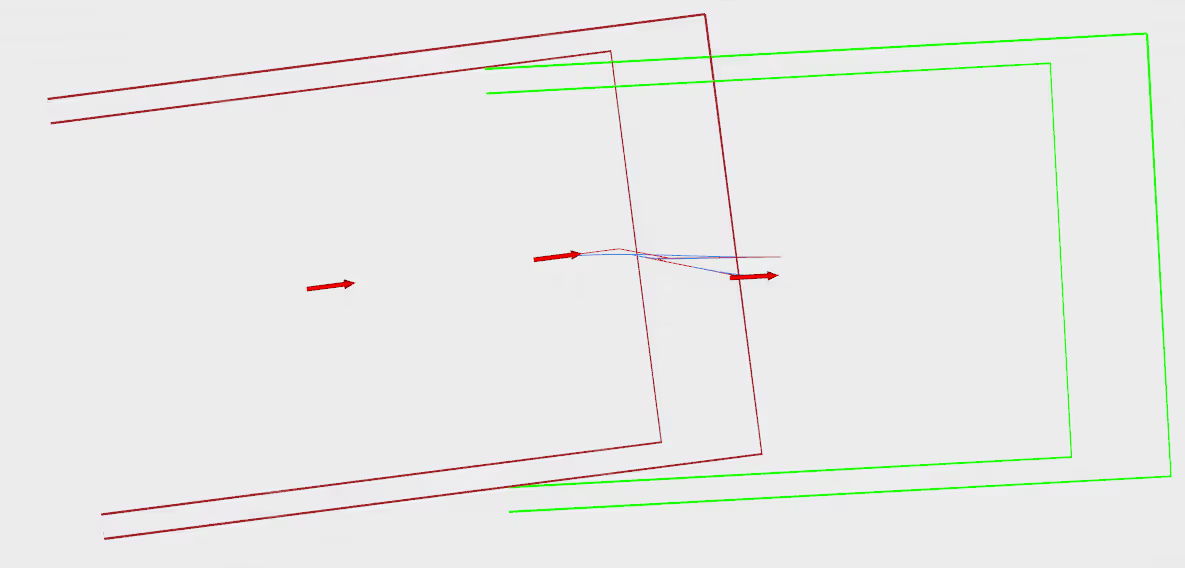
3.パスのスムージングと最適化
コアテクノロジー:ベジエ曲線
利点始点/終点の位置と方向(接線)が制御可能であることを保証しながら、制御点を通して滑らかで連続的な曲線を生成します。
アプリケーション:探索によって生成されたパス(角度を含むことが多い)を滑らかにし、連続的な曲率を確保します。パスセグメントを連結し、連続的な速度軌跡を生成します。
代替技術:Bスプライン、NURBS。
4.リアルタイムの障害物回避と進路調整
技術ダイナミック・ウィンドウ・アルゴリズム(DWA)、タイム・エラスティック・バンド(TEB)、ラピッド・リプランニング。
機能センサデータに基づき、最適化された元の経路にできるだけ近づきつつ、動的な障害物を回避するように経路/速度を局所的に調整する。
テクノロジーの融合
AGVによるパレットのピッキングと配置の経路計画プロセスは次のようになる。
1.グローバルプランニング(A*):グリッドマップ上でスタート地点からパレットエリア付近までの大まかな経路を計画する。
2.ターミナルプランニングスイッチ:AGVがパレットエリアに近づくと、詳細計画をトリガーします。
3.精密ドッキング(ハイブリッドA*):目標ポーズ(x,y,θ)への運動学に準拠したパスを計画する。
4.パスのスムージング(ベジェ/スプライン):スティッチされたパスをスムージングして、幾何学的に連続した最終パスを生成します。
5.軌道生成:コントローラが実行するために、平滑化された経路に基づいて速度/加速度制約を持つ軌道を生成する。
6.リアルタイム障害物回避:プロセス全体を監視し、障害物を回避するために経路/速度を動的に調整します。
課題
既存の技術はすでにAGVパレットのピッキングと配置の問題をある程度解決することができるが、まだ継続的な課題と開発の機会がある:
- 効率と精度のバランスより詳細なプランニングは、しばしば計算コストが高くなることを意味する。精度を確保しながら、いかにプランニングスピードを向上させるかは、継続的な最適化の課題である。
- ダイナミックな環境への適応:移動する障害物や、パレットの位置や姿勢の変更に、より強く対処する方法。
- センサーフュージョンと測位精度:高精度の経路実行は、高精度のリアルタイム測位と環境認識に依存する。
- マルチAGVの協調作業:密集したピッキング・配置エリアにおいて、複数のAGVを効率的かつ安全に連携させて運用する方法。
- 学習ベースの手法:AGVが自律的に最適なピッキング・配置戦略や経路を学習できるように、強化学習やその他の手法の利用を探る。
まとめ
AGVによる正確なパレットピッキングと配置は、オートメーション分野における複雑で精密な作業です。単一の「銀の弾丸」テクノロジーに依存するのではなく、複数のパスプランニングと最適化テクノロジーを巧みに組み合わせ、調整する必要があります。
グローバルルートガイダンスから、ハイブリッドA*によって可能になった運動学的知覚に基づく終点計画、そしてベジエ曲線のような技術によって達成された滑らかな軌道に至るまで、これらの技術は総称して、AGVが安全、正確、かつ効率的に動作するための「スマートな道筋」を描き、現代の自動化された物流と生産に強力な勢いを注入しています。技術が進歩し続けるにつれて、将来のAGVがパレットハンドリング作業においてさらに優れたインテリジェンスと柔軟性を発揮するようになると、私たちは確信しています。
中国・蘇州に本社を置くAiTEN Robotics社は、自律型産業車両(AMR/AGV)と物流自動化ソリューションの世界的リーダーである。AiTEN Roboticsは、フルスタックのマテリアルハンドリングシナリオのニーズを満たす10の製品シリーズを開発した。AiTEN Roboticsは30を超える国と地域で200を超えるプロジェクトを展開しており、自動車、食品・飲料、化学、医薬品、製造、サードパーティー・ロジスティクスなどの業界において、フォーチュン500に名を連ねる数多くの企業から信頼され、オペレーションの安全性、効率性、将来の即応性を高めている。

