








AGV(無人搬送車)マルチセンサ・フュージョンによるリアルタイム障害物回避技術
_%E7%94%BB%E6%9D%BF%201.avif)

AGVマルチセンサーフュージョンリアルタイム障害物回避システムの紹介
1. はじめに
センサーフュージョン技術は、ロボットが広範囲の障害物回避を実現するための鍵となります。その原理は、人間の脳が統合的に情報を処理する方法をモデルにしています。複数のセンサー(LIDAR、ビジョンカメラなど)を連携させ、多階層・多次元の情報統合を実現することで、単一センサーの限界を補い、最終的に環境に対する一貫した認識を構築します。この技術は、複数ソースデータの相補的な利点(正確な距離測定と物体認識など)を統合し、インテリジェントアルゴリズムを通じて情報処理フローを最適化することで、AGVは複雑な動的環境において障害物回避精度と環境適応性を同時に向上させることができます。
2. 検出精度の向上
LiDAR(正確な距離測定が可能だが、グレアの影響を受けやすい)、視覚(物体の種類の識別、低光量では制限あり)、超音波(近距離での死角検出)などのマルチセンサーデータを統合し、欠点を補完することで、障害物識別の精度を高めます。
3. システム信頼性の向上
冗長設計により、1 つのセンサーに障害が発生した場合でも (LIDAR の障害など)、他のセンサーが障害物回避を維持できます。また、カルマン フィルタリングやその他のアルゴリズムと組み合わせることで、ノイズ干渉が除去され、データの安定性が向上します。
4. 環境適応性の拡張
電磁干渉などの複雑なシーンに対処するために有利なセンサーを動的に切り替えることで、妨害防止データの選択、煙環境下での超音波と LiDAR の融合、透明/張り出した障害物用の赤外線などの特殊センサーを有効にします。
5. 障害物回避の意思決定を最適化する
マルチセンサーパーティションセンシング(前方の障害物回避/迂回ゾーンの描画など)、障害物の距離(LIDAR)、種類(視覚)、近接情報(超音波)を統合し、グローバル環境モデルを生成して、最適な経路を正確に計画します。
II マルチセンサー融合障害物回避原理
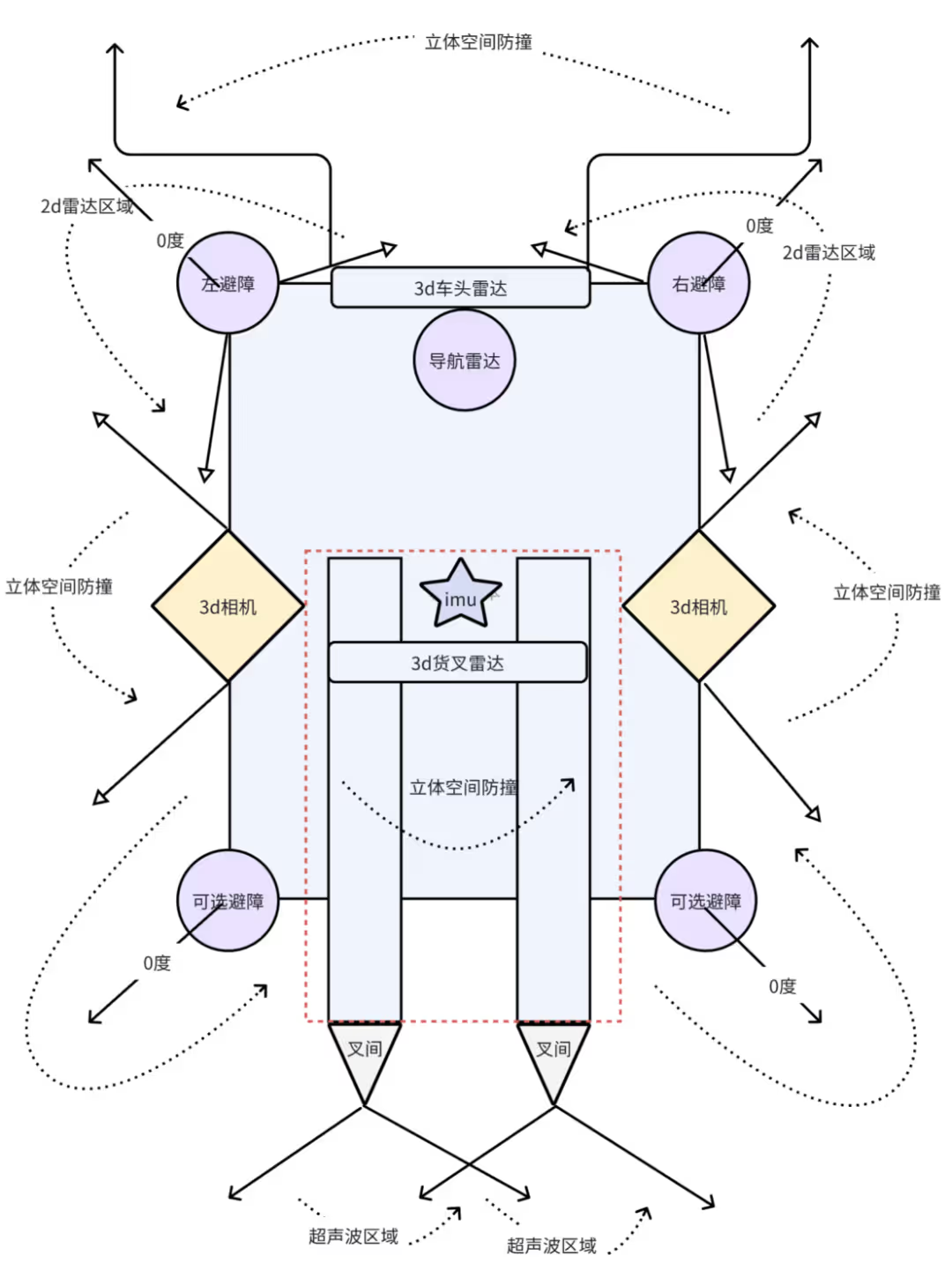
1. 典型的なレイアウト
- 前方の主な障害物回避:左右の2Dレーザーが障害物を水平にスキャンし、下部の超音波が低い障害物の検出を補助し、前方上部の斜め3Dレーザーが3次元空間をカバーします。
- 側面保護: AGV の側面の死角を排除するために、両側に斜めに取り付けられた深度カメラ。
- フォーク衝突回避:フォークにはIMUが搭載されており、姿勢をリアルタイムで監視し、上部と下部の3Dレーザーデータと組み合わせてフォークの軌道を動的に予測し、周囲を保護します。
- フォーク間衝突回避:デュアル超音波センサーが車両後部の両側のセクター領域内の障害物を監視します。
2. 融合法
- データ レベル:複数のセンサーのタイムスタンプと座標系を統合し、ポイント クラウド データを直接結合します。
- 機能レベル: LiDAR エッジ機能と視覚的な SIFT 機能の融合、PointNet++ (ポイント クラウド) と CNN (画像) を使用したディープ ラーニング、または EKF による障害物確率マップの生成。
- 決定レベル:ベイジアン ネットワークは各センサーの信頼度を動的に重み付けし、緊急シナリオでは超音波が緊急停止をトリガーし、LiDAR が迂回パスを計画します。
3. 環境センシング
- 遠距離と近距離の分業: 3D レーダー ポイント クラウドは遠端のグローバル障害物を検出し、深度カメラは近端のローカル障害物を識別します。
- 障害物定義:人、荷物、フォークリフトなど体積のある物体を含み、コアプロセスは「検出→追跡→位置特定」(存在確認→軌道予測→距離計算)です。
- セマンティック マップ:インスタンスのセグメンテーションを通じて障害物のカテゴリ (棚、エレベーターなど) にラベルを付け、輪郭を抽出してマップにマッピングし、インテリジェントな障害物回避の意思決定をサポートします。
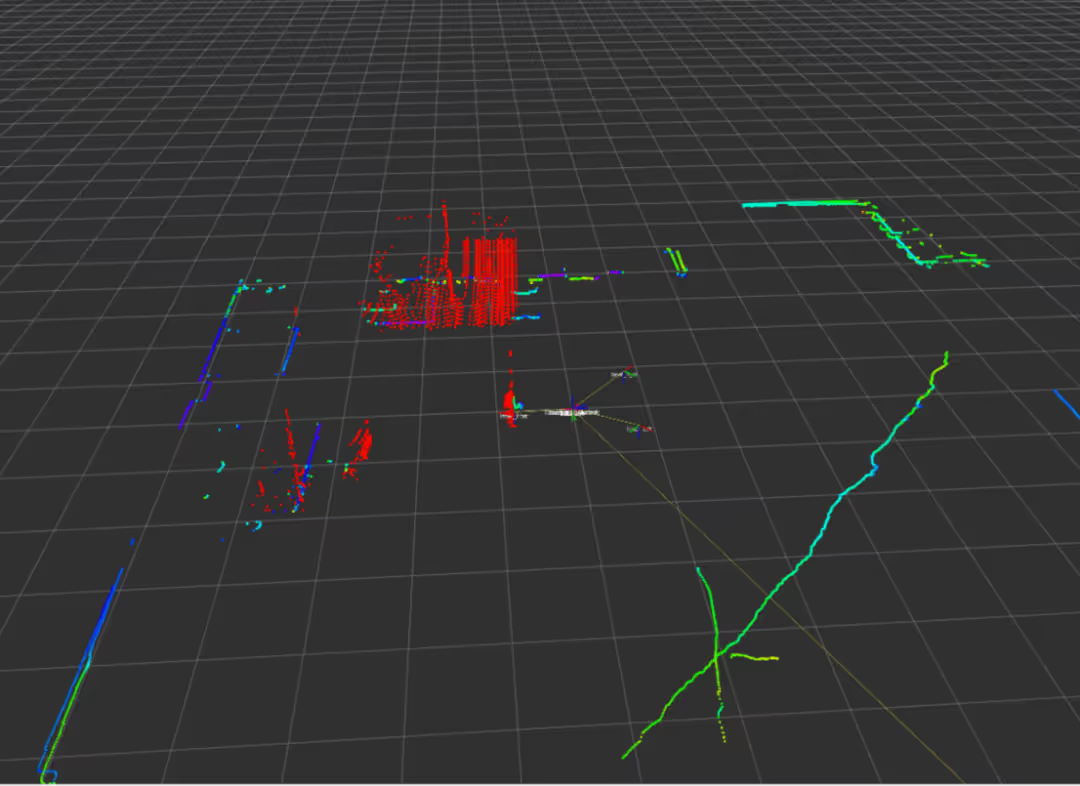
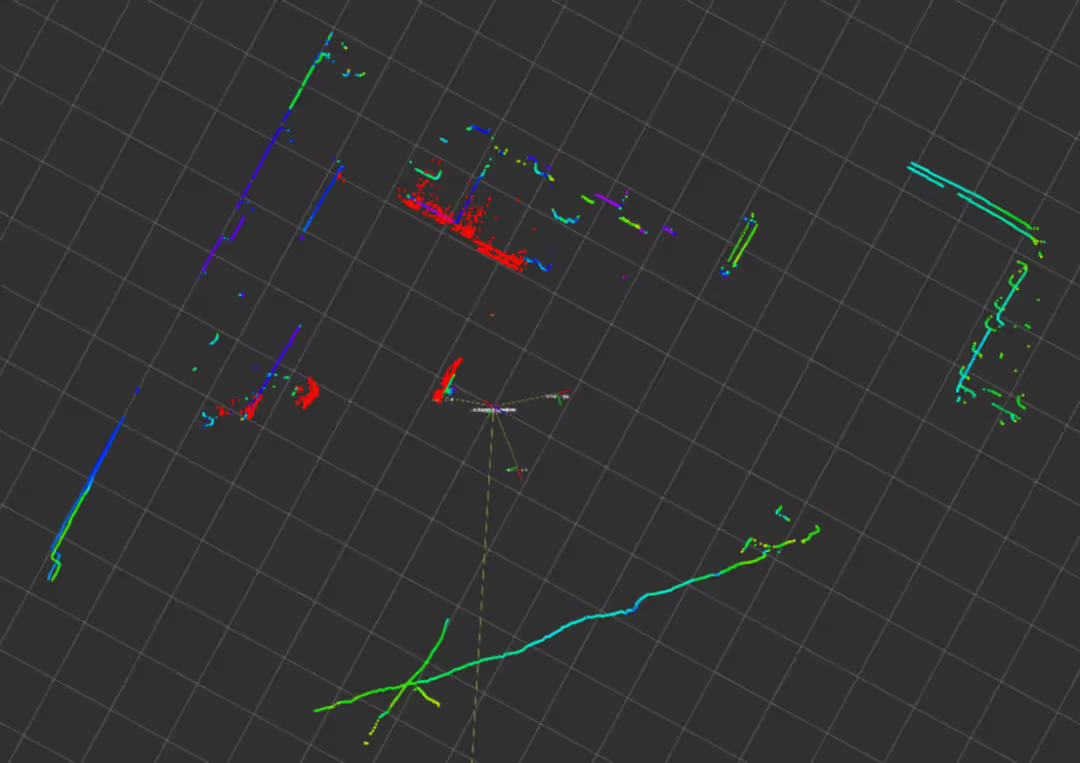
- グローバル障害物回避プロセス:大規模でノイズの多いポイント クラウド データの問題に対して、最初にフィルタリングとダウンサンプリングを実行します。地上ポイント クラウドをセグメント化した後、クラスタリング アルゴリズムによって地上障害物クラスターをセグメント化し、中心/寸法などの属性を囲むフレームに適合させます。ポイント クラウド ターゲット検出フレームワーク (PointPillar など) と組み合わせて、セマンティック注釈と追跡を実行し、カルマン フィルターを構築して軌跡を滑らかにし、演算の同時最適化を実行してリアルタイム処理を保証します。動きの歪みが存在する場合は、補償と補正が必要です。リアルタイム。動きの歪みが存在する場合は、補償と補正が必要です。
4. リアルタイム障害物回避アルゴリズム
- 局所障害物回避: 深度カメラが機体の周辺領域をカバーし、フォーク IMU が姿勢角のリアルタイム フィードバックを提供し、底部センサーが空間障害物を監視します。
- パス再計画: AGV 速度 (100 ~ 200 ミリ秒サイクル) に基づいて、動的ウィンドウ方式で実行可能な軌道をサンプリングし、動的な障害物の動きの傾向を予測し、パスをリアルタイムで最適化します。
- 強化学習支援: DQN、PPO などのアルゴリズムと組み合わせて、AGV がシミュレーション環境内の複雑な動的シーンに適応できるようにトレーニングし、自律的な意思決定能力を向上させます。
III マルチセンサー融合障害物回避の課題と将来
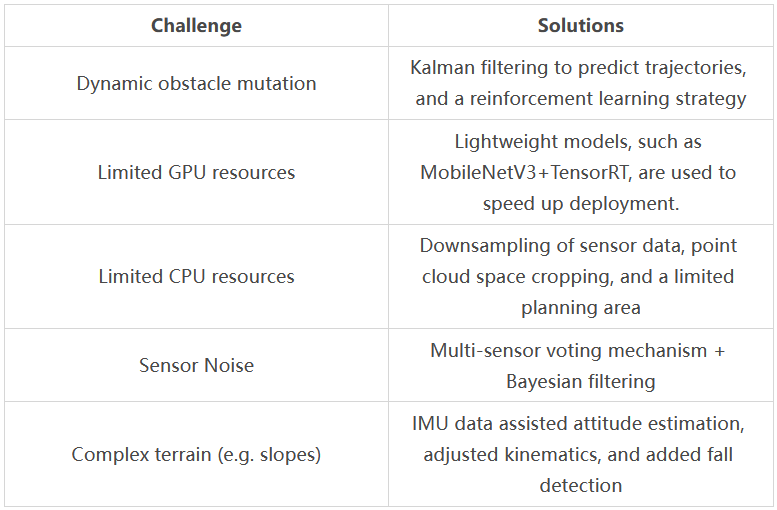
1. AGV障害物回避アプリケーションシナリオ
AGVの障害物回避の実用化シナリオでは、しばしばいくつかの困難に直面します。以下に、課題と解決策を挙げます。
2. 今後の方向性
- バイオニック戦略:アリのコロニー/鳥の群れの行動を模倣して、動的な障害物の軌道を予測します。
- ニューラル フュージョン: LiDAR およびビジョン データを直接処理するエンドツーエンド モデル (例: PointNet+++Transformer)。
- 脳のようなアーキテクチャ:低電力意思決定のためのインパルス ニューラル ネットワーク (SNN)、長時間の障害物の動きを予測するための LSTM+Attention メカニズム。
- 共同コンピューティング:クラウド、エッジ、エンドの階層化処理により、オンボードの演算負荷を軽減します。
- シミュレーションの移行:一般化を強化するためのドメインのランダム化、モデルのオンライン適応型リアルタイム微調整 (例: Meta-RL)。
- 人口インテリジェンス:複数の AGV パスを最適化するための連合学習、通行権を動的に調整するためのゲーム理論。
- 目標:バイオに着想を得たアルゴリズム、ドメイン間コラボレーション (V2X/デジタル ツイン)、エネルギー効率の高いハードウェアを通じて、「感知、決定、制御」のインテリジェント システムを構築し、安全性、効率性、倫理性を考慮しながら、複雑な環境で人間のような運転機能を実現します。
より技術的なコンテンツについては、 AiTEN Roboticsを購読してください。

