.webp)







.jpg)
















技術
AGV(自動導引車)多感測器融合即時避障技術
2025年5月28日
_%E7%94%BB%E6%9D%BF%201.png)
一、AGV多感測器融合即時避障系統介紹
1. 簡介
感測器融合技術是機器人實現全覆蓋避障的關鍵。其原理模仿人腦整合處理資訊的方式,透過協調多個感測器(例如光達、視覺攝影機等)進行多層次、多維度的資訊整合,彌補單一感測器的局限性,最終建立對環境的一致感知。此技術整合多源資料(如精確測距、物件辨識等)的互補優勢,並透過智慧演算法優化資訊處理流程,使AGV在複雜動態環境下同時提高避障精度和環境適應能力。
2.提高檢測準確率
融合光達(精準測距,但眩光易幹擾)、視覺(辨識物體類型,低光源受限)和超音波(近距離盲區偵測)等多感測器數據,互補不足,提升障礙物辨識的精確度。
3.增強系統可靠性
冗餘設計保證當單一感測器故障(例如光達故障)時,其他感測器仍能保持避障;結合卡爾曼濾波等演算法,濾除雜訊幹擾,提高資料穩定性。
4.擴展環境適應性
動態切換優勢感測器,以應對複雜場景,例如電磁幹擾時選擇抗干擾數據,煙霧環境下融合超音波和雷射雷達,以及針對透明/懸垂障礙物啟用紅外線等特殊感測器。
5. 優化避障決策
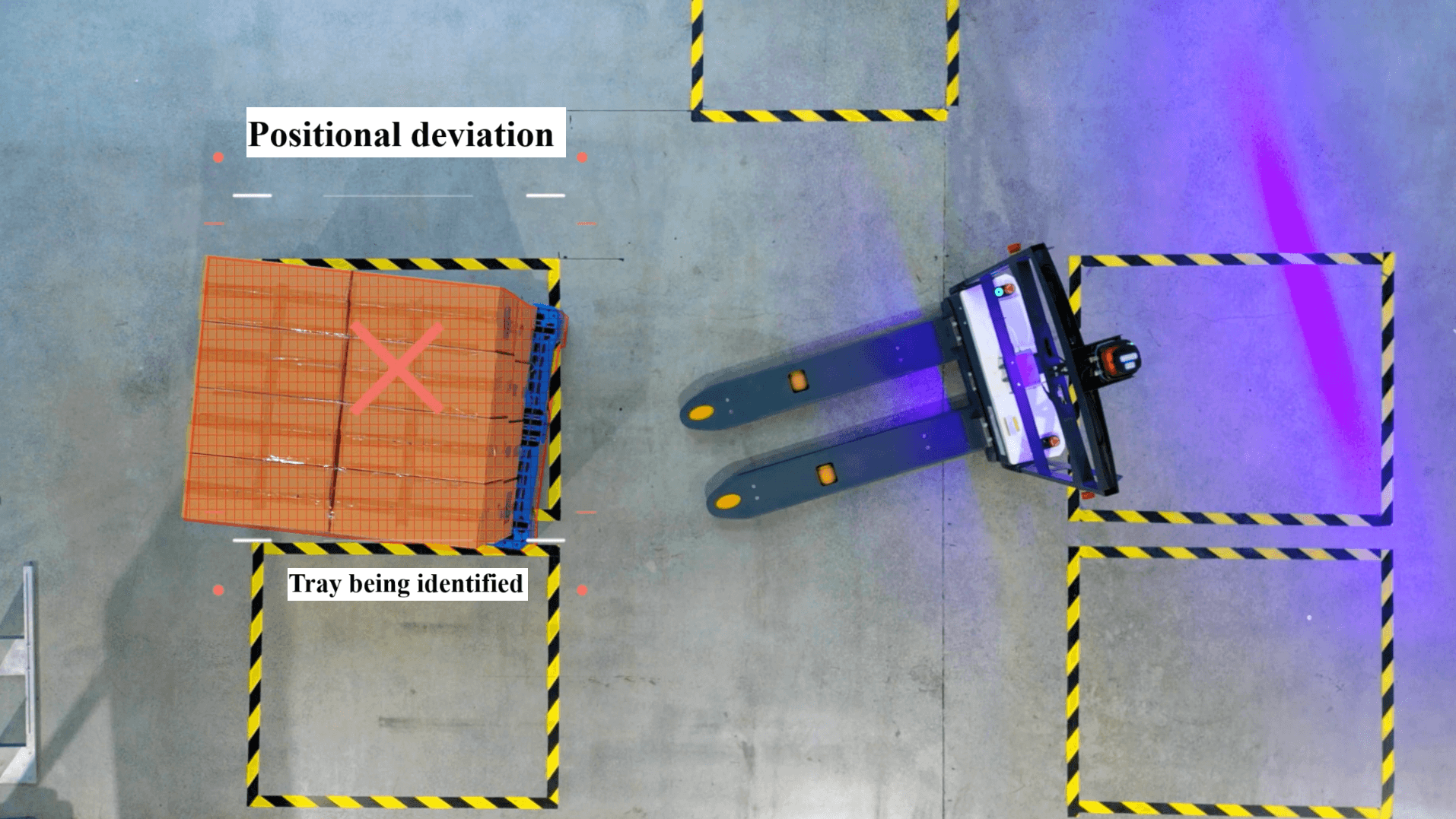
透過多感測器分區感知(如劃定前方避障/繞行區域),融合障礙物距離(雷射雷達)、類型(視覺)和接近度資訊(超音波),產生全局環境模型,精準規劃最優路徑。
二、多感測器融合避障原理
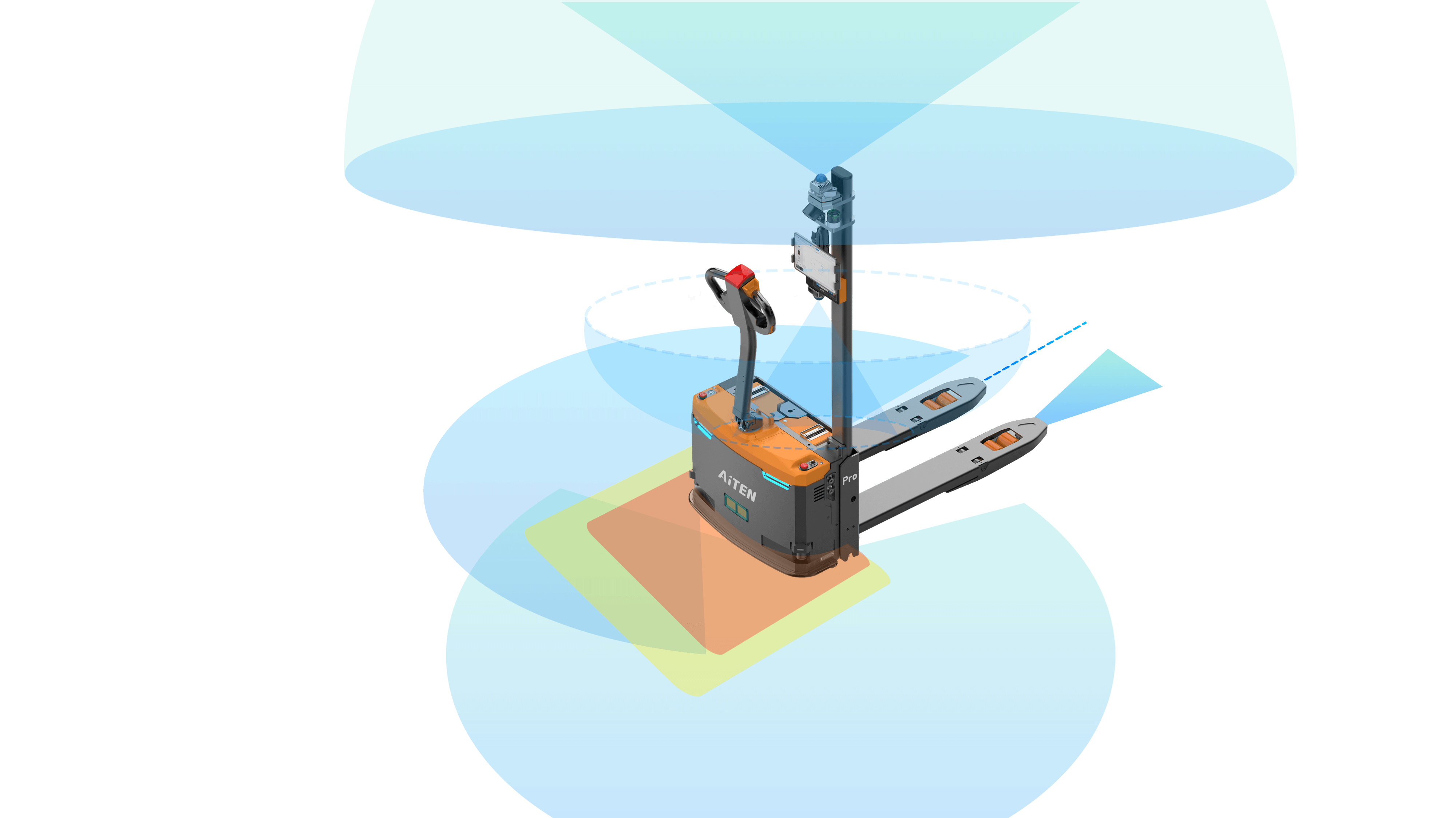
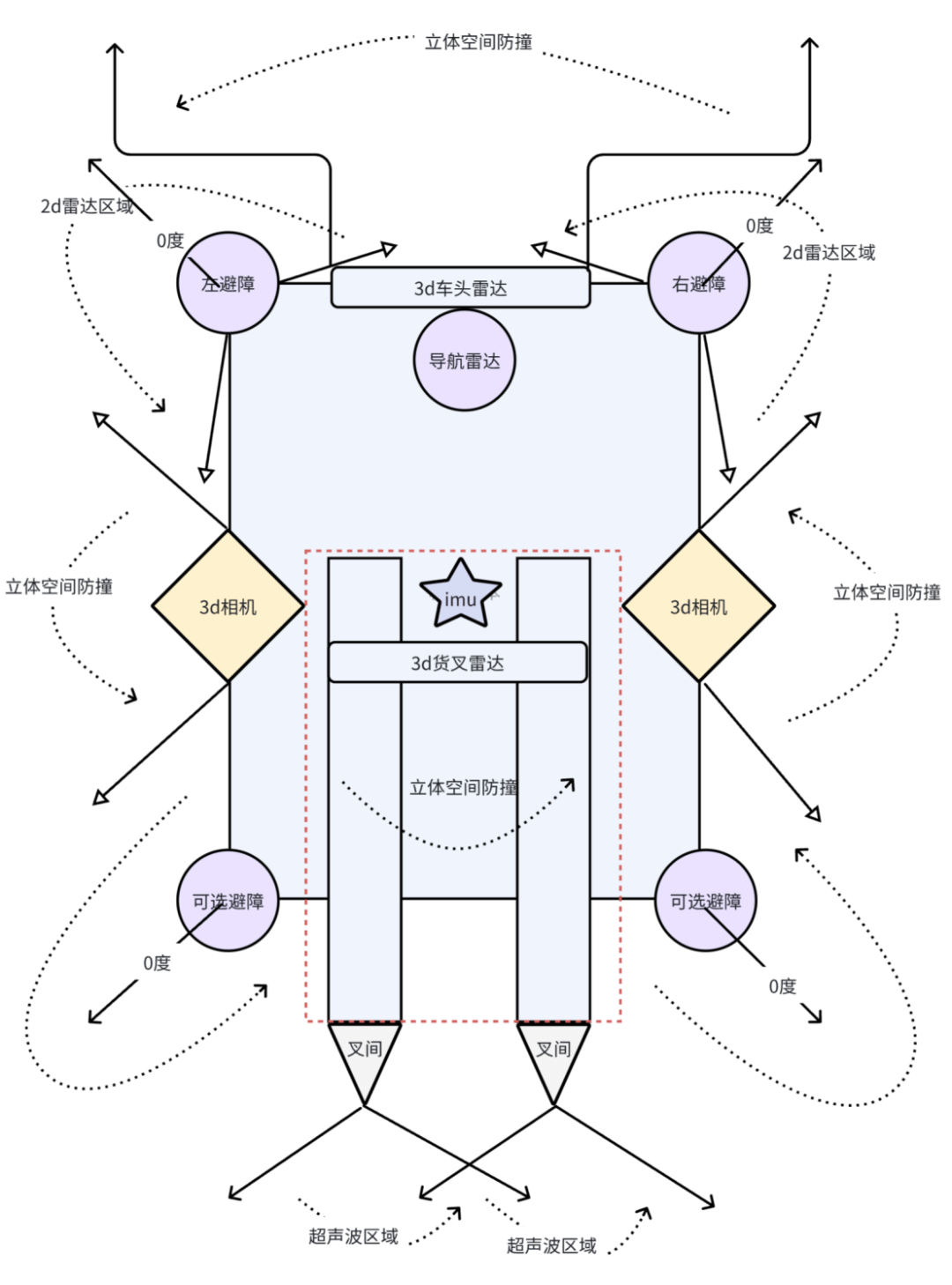
1.典型佈局
- 前方主避障:左右2D雷射水平掃描障礙物,底部超音波補充低障礙物檢測,前上斜3D雷射覆蓋三維空間。
- 側向保護:兩側斜置深度鏡頭,消除AGV側向盲點。
- 貨叉防撞:貨叉搭載IMU即時監測姿態,結合上下3D雷射資料動態預測貨叉軌跡,保護週邊區域。
- 叉間防撞:雙超音波感測器監測車輛後方兩側扇形區域內的障礙物。
2. 融合方法
- 資料層面:統一多感測器時間戳記和座標系,直接合併點雲資料。
- 特徵層面:LiDAR邊緣特徵與視覺SIFT特徵融合,使用PointNet++(點雲)和CNN(影像)進行深度學習,或透過EKF產生障礙物機率圖。
- 決策層:貝葉斯網路動態加權每個感測器的置信度,超音波在緊急情況下觸發緊急停車,雷射雷達規劃繞行路徑。
3.環境感知
- 遠近分工: 3D雷達點雲在遠端偵測全域障礙物,深度相機在近端辨識局部障礙物。
- 障礙物定義:包含人、貨物、堆高機等具有體積的物體,核心流程為『偵測→追蹤→定位』(確認存在→軌跡預測→距離計算)。
- 語意地圖:透過實例分割標註障礙物類別(例如:貨架、升降機),提取輪廓並映射到地圖上,支援智慧避障決策。
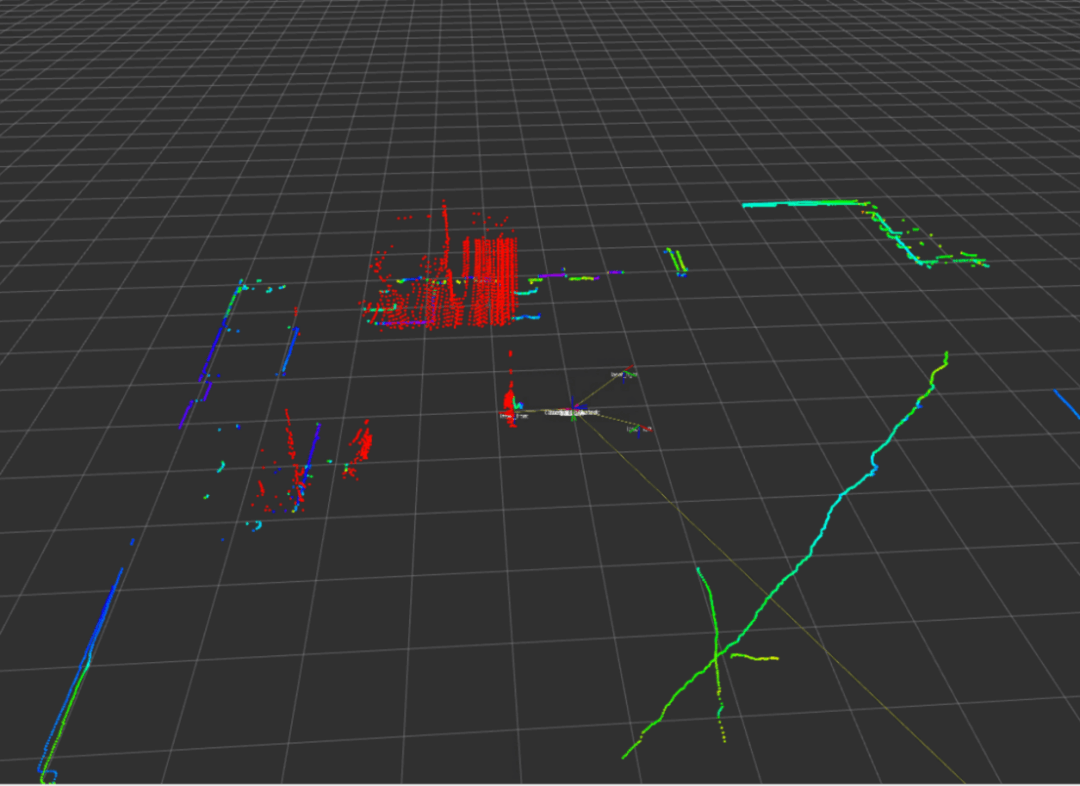
- 全域避障流程:針對點雲資料量大且雜訊較多的問題,首先進行濾波和下取樣;對地面點雲進行分割後,利用聚類演算法對地面障礙物簇進行分割,並將中心/尺寸等屬性擬合到包圍框中;結合點雲目標偵測框架(例如PointPillar),進行語義標註與追蹤,並且需要使用濾波法配置,同時執行功能即時的;當存在運動畸變時需要補償校正。
4.即時避障演算法
- 局部避障:深度攝影機覆蓋車身近週邊區域,前叉IMU即時回饋姿態角,底部感測器監測空間障礙物。
- 路徑重規劃:根據AGV速度(100-200ms週期),透過動態視窗法取樣可行軌跡,預測動態障礙物運動趨勢,即時優化路徑。
- 強化學習輔助:結合DQN、PPO等演算法,訓練AGV適應模擬環境中複雜的動態場景,提升自主決策能力。
三、多感測器融合避障挑戰與未來
1.AGV避障應用場景
AGV避障實際應用場景中經常會遇到一些困難。以下列出了挑戰和解決方案:
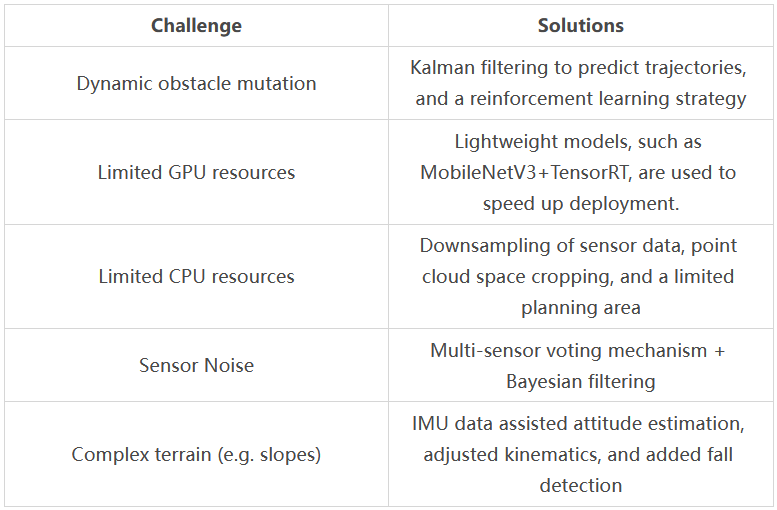
2. 未來方向
- 仿生策略:模仿蟻群/鳥群行為預測動態障礙物軌跡。
- 神經融合:端到端模型(例如 PointNet+++Transformer)直接處理 LiDAR 和視覺資料。
- 類腦架構:用於低功耗決策的脈衝神經網路 (SNN)、用於預測長期序列障礙物運動的 LSTM+注意力機制。
- 協同運算:雲端、邊端分層處理,減輕機上運算壓力。
- 模擬遷移:領域隨機化以增強泛化,模型的線上自適應即時微調(例如 Meta-RL)。
- 群體智能:聯合學習優化多 AGV 路徑,博弈論動態協調通行權。
- 目標:透過仿生演算法、跨領域協作(V2X/數位孿生)和節能硬件,建構「感知-決策-控制」的智慧系統,在複雜環境下實現類人駕駛能力,兼顧安全、效率和道德。
訂閱AiTEN Robotics以獲取更多技術內容。