








AGV 棧板搬運取放路徑規劃技術分析
_%E7%94%BB%E6%9D%BF%201.avif)
.avif)
AGV 精確的棧板拾取與放置仰賴先進的路徑規劃技術。這項任務不僅需要無碰撞的路徑,還需要高精度的姿勢以及接近托盤時的平滑軌跡。本文分析了實現此目標的核心技術,例如 Hybrid A 和 Bézier 曲線的協調應用。
為什麼托盤搬運需要特殊的路徑規劃?
挑戰:
- 末端精度高貨叉必須以厘米/毫米的精度與棧板叉孔對齊,並符合嚴格的停放方向要求。
- 強大的移動限制:需要嚴格遵守 AGV 尺寸、最小轉彎半徑和非完全限制(無橫向移動),尤其是在狹窄的空間。
- 路徑平穩:避免突然加速、減速或轉向,以確保貨物的穩定性和作業安全。
- 近端精確避障:接近棧板時需要高精度感測,以處理未知障礙物或定位錯誤。
技術分析
1.全局路徑規劃
技術:Dijkstra,標準 A*
功能:在全球網格地圖上快速產生從起點到托盤區域的一般路徑(連線、低成本)。
特點:速度快,忽略運動細節。
2.端點精細路徑規劃
核心技術:混合動力 A**
優點:在連續狀態空間 (x, y, θ) 中搜尋,並直接嵌入車輛運動模型 (例如自行車模型)。
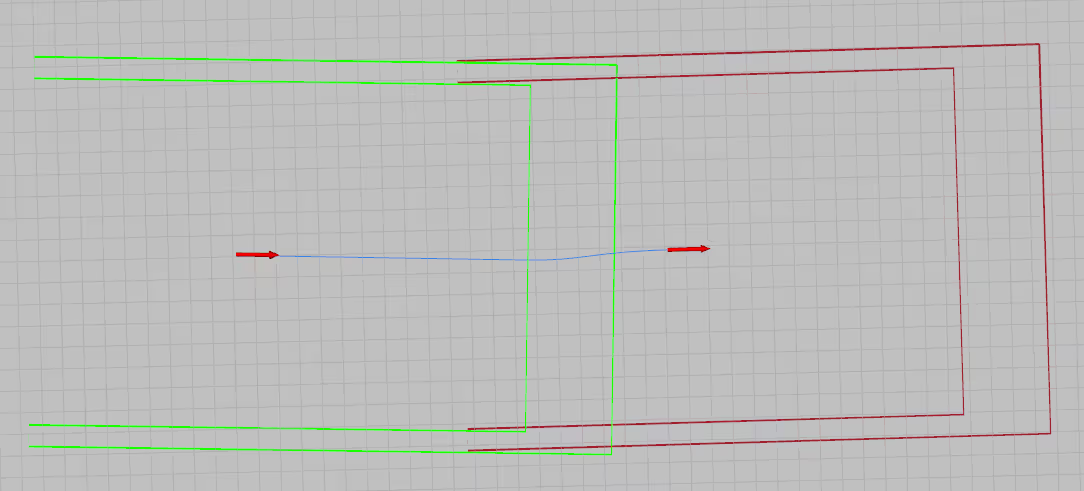
效果:產生可達到精確目標姿勢 (x、y、θ) 並符合轉彎半徑等限制條件的可行路徑,解決「最後一公尺」的複雜轉彎問題。
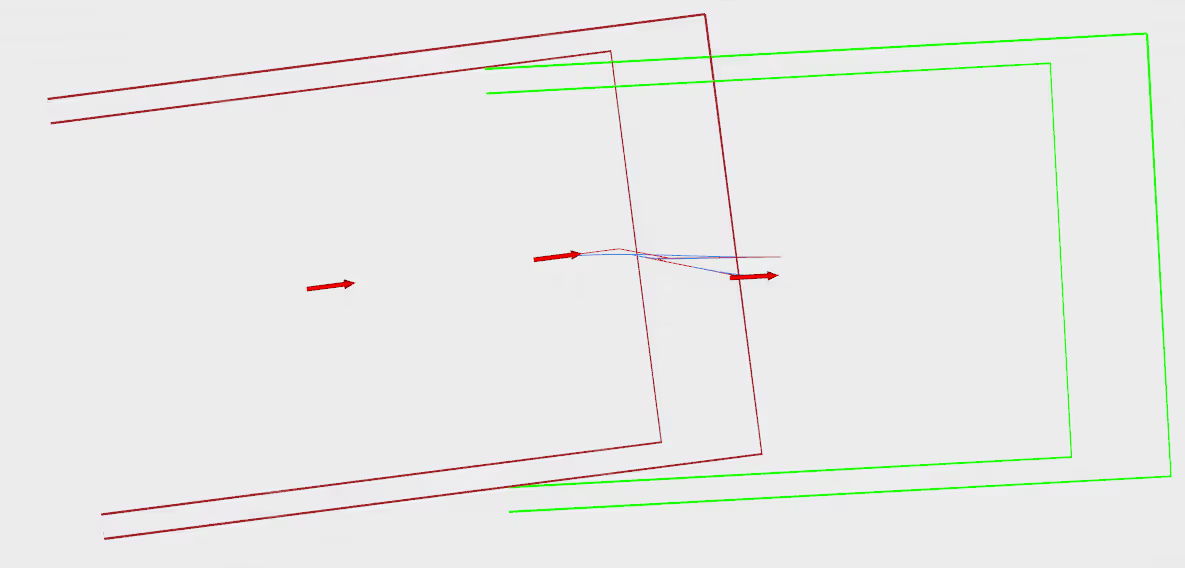
3.路徑平滑與最佳化
核心技術:貝茲曲線
優點:透過控制點產生平滑、連續的曲線,確保起點/終點位置和方向(切線)是可控的。
應用:平滑搜尋產生的路徑 (通常包含角度),確保連續曲率;連結路徑段;產生連續速度軌跡。
替代技術:B-splines, NURBS。
4.即時避障與路徑調整
技術:動態視窗演算法 (DWA)、時間彈性帶 (TEB)、快速重新規劃。
功能:根據感測器資料,局部調整路徑/速度以避開動態障礙物,同時儘可能接近原始最佳化路徑。
技術融合
AGV 棧板取放路徑規劃流程如下。
1.全局規劃 (A*):在網格地圖上規劃一條從起點到棧板區附近的粗略路徑。
2.終端規劃開關:當 AGV 接近棧板區域時,觸發詳細規劃。
3.精確對接(Hybrid A*):規劃符合運動學至目標姿勢 (x, y, θ) 的路徑。
4.路徑平滑(Bezier/Spline):平滑拼接後的路徑,以產生幾何連續的最終路徑。
5.軌跡產生:根據控制器執行的平滑路徑,產生具有速度/加速度限制的軌跡。
6.即時避障:監控整個過程,並動態調整路徑/速度以避開障礙物。
挑戰
儘管現有技術已能在一定程度上解決 AGV 棧板取放問題,但仍有持續的挑戰與發展機會:
- 平衡效率與精確度:更詳細的規劃通常意味著更高的運算成本。如何在確保準確性的同時提高規劃速度,是需要持續優化的領域。
- 對動態環境的適應能力:如何更穩健地處理移動的障礙物、變更的棧板位置或姿勢。
- 感測器融合與定位精度:高精度路徑執行有賴於高精度即時定位與環境感知。
- 多 AGV 協同作業:在人口密集的分揀和放置區域,如何有效且安全地協調多台 AGV 進行作業。
- 以學習為基礎的方法:探索強化學習和其他方法的使用,讓 AGV 自動學習最佳的採摘和放置策略與路徑。
總結
在自動化領域中,AGV 的精確托盤揀選和放置是一項複雜而精確的任務。它並不依靠單一的「銀彈」技術,而是依靠多種路徑規劃和優化技術的巧妙組合和協調。
從 Hybrid A* 實現的全局路線導引,到以運動感知為基礎的端點規劃,以及透過 Bézier 曲線等技術實現的平滑軌跡,這些技術共同為 AGV 安全、精確、高效地運作描繪出一條「智慧之路」,為現代自動化物流和生產注入了強大動力。隨著技術的不斷進步,我們有理由相信未來的 AGV 將在托盤搬運作業中展現更高的智慧和靈活性。
AiTEN Robotics 總部設在中國蘇州,是自動化工業車輛 (AMR/AGV) 和物流自動化解決方案的全球領導者。AiTEN Robotics 已開發出十個產品系列,可滿足全棧道物料搬運場景的需求。AiTEN Robotics 已在全球 30 多個國家和地區部署了 200 多個項目,得到了眾多財富 500 強企業的信賴,涉及汽車、食品飲料、化工、製藥、製造、第三方物流等行業,提升了運營安全、效率和未來就緒能力。

