








從 AlphaGo 棋盤到智能操作機器人:具體智能如何打破真實與虛擬之間的界限?
_%E7%94%BB%E6%9D%BF%201.avif)

從 AlphaGo 的棋盤到智慧型操控機器人,具體化的智慧重構了現實與虛擬之間的邊界。AiTEN 等公司通過多模態感知、動態決策和群智技術,將工業機器人從「執行工具」升級為「認知主體」。未來,隨著5G、人工智能大模型、數位孪生等技術的深度融合,體感智能將推動製造業實現「自主、靈活、低碳」的跨越,開啟工業4.0的新篇章。
Ⅰ.具體智能的進化
--從象徵到實體的認知躍進
01 機器人學的基礎與象徵主義的困境
1950 年,被譽為人工智慧之父的 Alan Turing 在他的開創性論文Computing Machinery and Intelligence 中提出了具體智能的概念。第一個實現人工智能概念的移動機器人 "Shakey "是在 Charles Rosen 的領導下,於 1956 年至 1972 年間在斯坦福研究所(現為 SRI International)開發出來的。Shakey 由兩台電腦透過無線系統進行遠端控制,其緩慢的處理能力意味著它往往需要數小時的時間來感知環境和規劃動作。
早期的機器人系統在一個符號框架內運作,根據預先定義的規則執行簡單的任務。這種「感知-計劃-行動」的循序架構在動態的真實世界環境中被證明是不靈活的。象徵式 AI 的限制變得很明顯:它缺乏對外部變化的真正適應性。
因此,學者們開始反思傳統符號主義人工智能的局限性。他們逐漸意識到智能與身體和環境有著密切的關係,不能僅僅依賴抽象的符號運算。
2.行為主義的突破與具體覺醒
1986 年,行為主義機器人學的先驅 Rodney Brooks 從控制論的角度指出,傳統的符號主義人工智能過於依賴複雜的推理系統,忽略了身體與環境互動在智能行為中的關鍵作用。他提出了行為機器人學的概念,強調去除表徵,提倡發展以行為為核心的具體智能,認為智能是具體化(Embodied)和情境化(Contextualised)的。這個理論奠定了具體智能的基礎,並開始影響當時的機器人領域。
1991 年,Brooks 提出了「以行為為基礎的人工智能」(Behaviour-Based AI),認為智慧系統應該直接與環境互動,而非依賴內部模型,以達到高度的適應性。這項突破性的工作成為具體智能的里程碑,引領研究人員從計算能力轉向身體與環境互動,並推動機器人在適應性與環境互動方面的創新。
20 世紀 90 年代,美國麻省理工學院 (MIT) 成功研發出一種名為 Genghis 的六足仿生機器人,它可以依靠感應器回饋實現自適應性行走,是世界上第一個具有機器感知、推理、增強學習和自主行為能力的人工智能機器人。這項成就標誌著人工智能機器人學的一個重要里程碑。
3.工業 4.0 與虛擬實境匯流的臨界點
二十一世紀初,具體智能的研究逐漸深入並延伸到人類智能領域。研究人員提出了基於感知、行動和環境互動的具體認知模型,以更好地理解人類的認知過程。同時,仿人機器人和仿生機器人領域的技術進步進一步推進了具體智能的應用,使機器人能夠更逼真地應對複雜物理環境中的挑戰。
2010年代,隨著深度學習和機器學習技術的快速發展,具體智能進入了一個新的階段。研究人員將深度學習技術與具體智能相結合,通過深度強化學習賦予機器人自我探索和適應行為的能力,使其能夠在未知環境中進行自我學習。2011 年,德國工業 4.0 戰略提出「資訊物理系統」(CPS),要求將物理實體與數位模型深度 In 2011 年,德國工業 4.0戰略提出「資訊物理系統」(CPS),要求物理實體與數位模型深度結合,工業機器人(如機械手臂)向具體智能化轉型,以適應複雜多變的工業生產需求。
4.具體智能的爆炸:從 AlphaGo 到物理實體
到了 2020 年代,具體智能已經成為人工智能和機器人的重要研究方向。AlphaGo 在 2016 年戰勝李世石,標誌著深度學習在抽象決策方面的突破。然而,圍棋屬於一種「封閉環境」,而具體化智能需要解決開放環境中的物理交互問題。
2024年3月,OpenAI與Figure Inc.合作推出Figure 01仿人機器人,展示了具體化智能在理解、判斷和自我評估方面的前沿進展。同年 10 月,具體化小腦模型被列為人工智能十大前沿技術趨勢之一,標誌著具體智能正進一步結合多模態感知系統、仿生設計和大型模型技術,使機器人具備更接近人類的適應能力和決策能力,推動人機協作進入新的未來。
II.無人駕駛堆高機的技術突破
--具體實踐中的動態障礙迴避與多機器協作
1. 簡介
體感智能領域蕴藏著巨大的市場潛力和發展機遇。隨著技術的不斷成熟和應用領域的不斷拓展,體感智能產品將在智能製造、智能家居、智能醫療、智能服務等眾多領域扮演重要角色。
工廠和車間是機器人最早也是最成熟的應用場景之一。傳統工業機器人(機械手臂)已廣泛應用於汽車製造、電子裝配等領域,但多為固定位置的專用設備。而隨著機體智能的加入,它有望承擔更加靈活多變的生產任務,成為「普通工人的工廠」。倉庫和物流中心是體感智慧商業化最前沿的戰場之一。電子商務的蓬勃發展使得倉儲和分選的自動化需求急劇增加,傳統的固定輸送帶和 AGV 已無法滿足對靈活性的要求,因此催生了一些可以在倉庫中自由移動、執行搬運任務的通用機器人。
作為體感智能領域的先行者,艾訊以自主研發的認知決策技術為核心,突破智能機器人自主感知和動態決策的難題。其 MP10s, APe15等無人叉車已廣泛應用於智慧製造、智慧物流等場景。公司一直注重「科技+场景」双轮驱动,通过AI模型与机器人深度融合,打造从算法研发到产业落地的全链条生态。
2.動態避障:從被動反應到主動認知
無人叉車在操作過程中需要感知環境。AiTEN 的搬運機器人採用多模態異質感測器融合技術,可以感知環境資訊,並通過模型計算對環境進行認知推理,大大提高了對動態、非結構場景的適應能力。
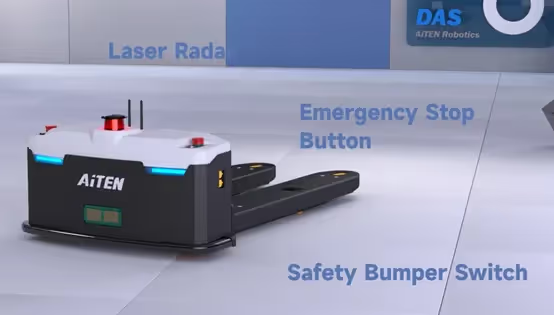
叉尖感應器與貨物就位感應器相互協調,可將精確度控制在 ±10mm 以內。
此外,AiTEN 的機器人支援平面 360° 安全停車及前向三維避障,並可支援低/懸空障礙物偵測識別,搭配叉尖碰撞偵測、緊急停車開關及包覆式防撞條,符合 CE 認證。
3.多機器協作:從單機自動化到群體智慧化
中央控制系統在大型模型庫的支援下,可進行資料分析及遠端控制搬運機器人。AiTEN 軟體平台在人工智慧運算的支援下,可自動分配與排程任務,全面提升內部物流管理,支援與多種設備與系統相容,輕鬆與現有基礎設施無縫整合,同時支援即時路徑規劃與多機器人協同操作,避免擁塞與衝突,提高作業效率,優化工作流程。同時支援即時路徑規劃與多台機器人的協同操作,避免擁塞與衝突,提高作業效率並優化工作流程。
某3c電子行業客戶,通過引入艾訊機器人AR15和智能排程系統,優化了內部物流體系,降低了物流成本,提高了生產協同性,縮短了產品的整體週轉時間,保障了產品的高品質、大規模生產需求。
總結
從 AlphaGo 的棋盤到智慧型操控機器人,具體智能正在重構現實與虛擬之間的邊界。AiTEN 等公司通過多模態感知、動態決策和群智技術,將工業機器人從「執行工具」升級為「認知主體」。未來,隨著5G、人工智能大模型、數字孪生等技術的深度融合,體感智能將推動製造業實現「自主、靈活、低碳」的飛躍,開啟工業4.0的新篇章。
身為智慧物流解決方案領域的企業,艾騰機器人始終聚焦「智慧工廠」場景,深度融合技術創新與產業需求,已為全球200多家製造業客戶提供全方位服務:依托全系列搬運機器人產品矩陣覆蓋多樣化技術搬運場景、自研產業級智慧調度系統實現多設備高效協同、自研產業級智慧調度系統實現多設備高效協同作用。我們已為全球200多家製造業客戶提供全方位服務:依托全系列搬運機器人涵蓋多樣化搬運場景、自主研發的產業級智慧調度系統實現多設備高效協同、以及涵蓋售前規劃、部署實施到運維優化的全生命週期服務體系,幫助企業實現物流智能化轉型,持續賦能製造業數位升級與發展高品質。

