








AGV แบบนำทางด้วยวิสัยทัศน์คืออะไร? AGV แบบนำทางด้วยวิสัยทัศน์ถูกนำมาใช้ในการจัดการวัสดุอย่างไร?
_%E7%94%BB%E6%9D%BF%201.avif)
1. AGV นำทางด้วยวิสัยทัศน์คืออะไร?
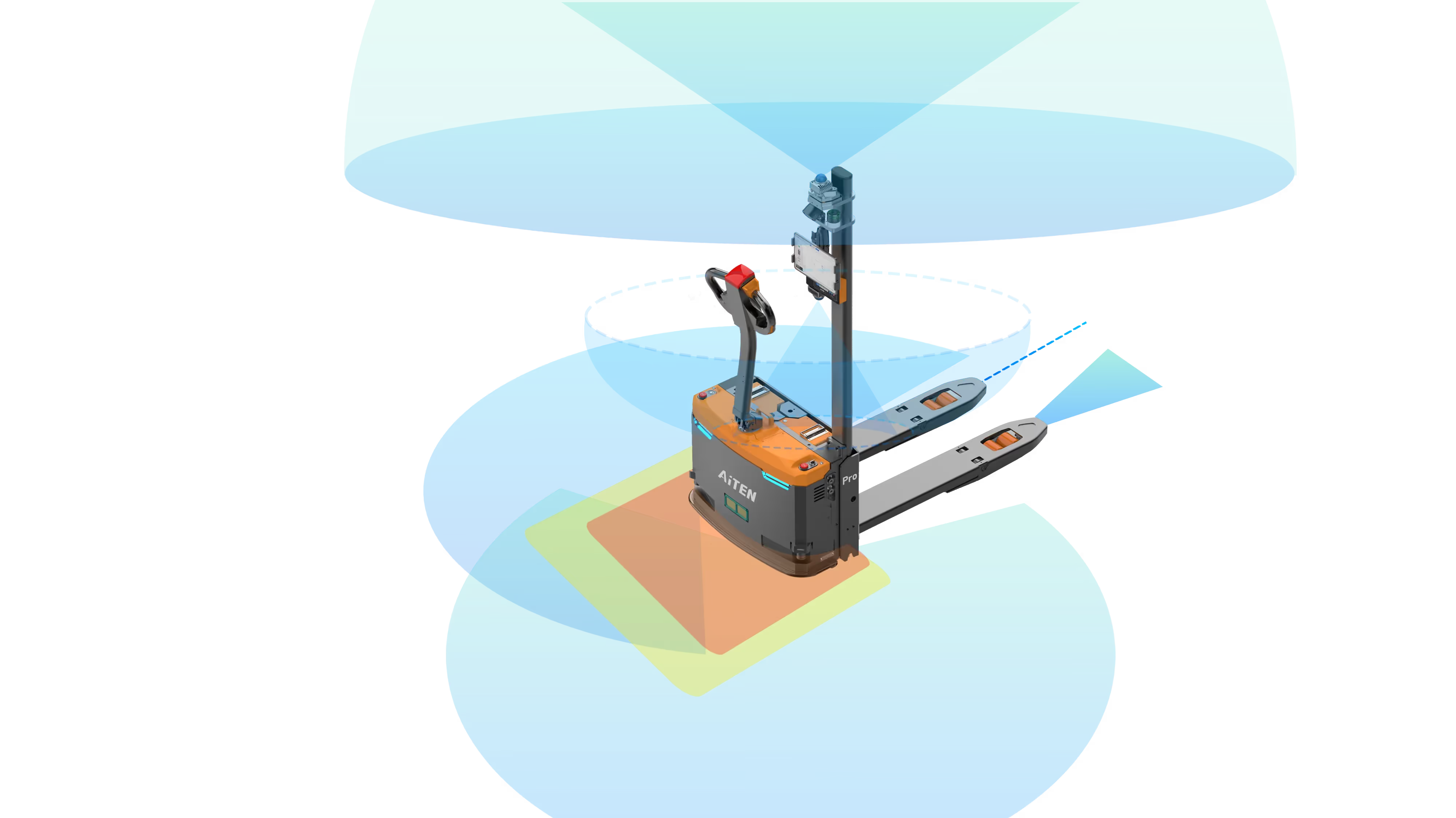
AGV แบบนำทางด้วยวิสัยทัศน์เป็น AGV ที่กำลังพัฒนาและเติบโตอย่างรวดเร็ว AGV ประเภทนี้ติดตั้งกล้อง CCD และเซ็นเซอร์ และคอมพิวเตอร์ออนบอร์ดพร้อมฐานข้อมูลภาพสภาพแวดล้อมโดยรอบของเส้นทางการขับขี่ที่ AGV ตั้งใจไว้
AGV แบบนำทางด้วยวิสัยทัศน์สามารถติดตั้งได้โดยไม่ต้องดัดแปลงสภาพแวดล้อมหรือโครงสร้างพื้นฐานใดๆ AGV ทำงานโดยใช้กล้องบันทึกภาพเส้นทาง ทำให้สามารถบันทึกเส้นทางซ้ำได้โดยใช้ภาพที่บันทึกไว้เพื่อนำทาง
AGV แบบ Vision-Guided ใช้เทคโนโลยี Evidence Grid ซึ่งเป็นการประยุกต์ใช้การตรวจวัดปริมาตรแบบความน่าจะเป็น คิดค้นและพัฒนาโดย ดร. ฮันส์ โมราเวค แห่งมหาวิทยาลัยคาร์เนกีเมลลอน เทคโนโลยี Evidence Grid ใช้ความน่าจะเป็นของการครอบครองพื้นที่ในแต่ละจุดในอวกาศเพื่อชดเชยความไม่แน่นอนในประสิทธิภาพของเซ็นเซอร์และสภาพแวดล้อม เซ็นเซอร์นำทางหลักเป็นกล้องสเตอริโอที่ออกแบบมาเป็นพิเศษ
AGV ที่นำทางด้วยวิสัยทัศน์ใช้ภาพ 360 องศาเพื่อสร้างแผนที่ 3 มิติ ซึ่งทำให้ AGV ที่นำทางด้วยวิสัยทัศน์สามารถติดตามเส้นทางที่ผ่านการฝึกอบรมได้โดยไม่ต้องใช้ความช่วยเหลือจากมนุษย์หรือการเพิ่มคุณสมบัติพิเศษ สถานที่สำคัญ หรือระบบระบุตำแหน่ง
AGV ที่นำทางด้วยวิสัยทัศน์มีประโยชน์อย่างมากในอุตสาหกรรมที่ต้องการโซลูชันโลจิสติกส์แบบไดนามิกและยืดหยุ่น ส่งผลให้มีแนวโน้มที่เพิ่มมากขึ้นในการผลิตอัจฉริยะและอุตสาหกรรม 4.0
2. AGV ที่นำทางด้วยวิสัยทัศน์ถูกนำมาใช้ในการจัดการวัสดุอย่างไร?
ระบบ AGV คือหุ่นยนต์ที่ติดตั้งกล้องอย่างน้อยหนึ่งตัว ซึ่งใช้เป็นเซ็นเซอร์เพื่อส่งสัญญาณป้อนกลับทุติยภูมิไปยังตัวควบคุมหุ่นยนต์ เพื่อให้การเคลื่อนที่ไปยังตำแหน่งเป้าหมายที่เปลี่ยนแปลงได้แม่นยำยิ่งขึ้น AGV ที่ควบคุมด้วยภาพกำลังพลิกโฉมกระบวนการผลิตอย่างรวดเร็ว โดยช่วยให้หุ่นยนต์สามารถปรับตัวและนำไปใช้งานได้ง่ายขึ้น ในขณะเดียวกันก็ช่วยลดต้นทุนและความซับซ้อนของเครื่องมือคงที่ที่เคยเกี่ยวข้องกับการออกแบบและการติดตั้งเซลล์หุ่นยนต์ได้อย่างมาก ไม่ว่าจะเป็นการจัดการวัสดุ การประกอบอัตโนมัติ การใช้งานทางการเกษตร วิทยาศาสตร์ชีวภาพ และอื่นๆ ตัวอย่างหนึ่งของ AGV ที่ควบคุมด้วยภาพซึ่งเป็นที่นิยมแต่ค่อนข้างล้าสมัย ซึ่งใช้สำหรับการจัดการวัสดุ ระบบภาพ (กล้องและซอฟต์แวร์) จะกำหนดตำแหน่งของผลิตภัณฑ์ที่ป้อนแบบสุ่มลงบนสายพานลำเลียงรีไซเคิล ระบบภาพจะระบุพิกัดตำแหน่งที่แน่นอนของส่วนประกอบต่างๆ ให้กับหุ่นยนต์ ซึ่งกระจายอยู่แบบสุ่มใต้ระยะการมองเห็นของกล้อง ช่วยให้แขนหุ่นยนต์สามารถจัดตำแหน่งอุปกรณ์จับยึด (กริปเปอร์) ที่ติดอยู่กับส่วนประกอบที่เลือกและหยิบออกจากสายพานลำเลียงได้ สายพานลำเลียงอาจหยุดอยู่ใต้กล้องเพื่อให้สามารถระบุตำแหน่งของชิ้นส่วนได้ หรือหากระยะเวลาการทำงานเพียงพอ ก็สามารถเลือกชิ้นส่วนได้โดยไม่ต้องหยุดสายพานลำเลียง โดยใช้ระบบควบคุมที่ติดตามชิ้นส่วนที่กำลังเคลื่อนที่ผ่านซอฟต์แวร์วิชั่น ซึ่งโดยทั่วไปจะทำโดยการติดตั้งตัวเข้ารหัสเข้ากับสายพานลำเลียง และใช้สัญญาณป้อนกลับนี้เพื่ออัปเดตและซิงโครไนซ์ลูปควบคุมวิชั่นและการเคลื่อนที่ ฟังก์ชันการทำงานดังกล่าวเป็นที่นิยมในวงการ AGV ที่ใช้ระบบวิชั่นนำทาง ปัจจุบันเป็นเทคโนโลยีที่พัฒนาอย่างรวดเร็วและพิสูจน์แล้วว่ามีประโยชน์ทางเศรษฐกิจในการจัดการวัสดุและต้นทุนแรงงานที่มีทักษะ โดยลดการแทรกแซงด้วยมือ เพิ่มความปลอดภัย เพิ่มคุณภาพ และเพิ่มอัตราการผลิต รวมถึงประโยชน์อื่นๆ อีกมากมาย
ปัจจุบัน AiTEN ยังไม่มี AGV แบบนำทางด้วยวิสัยทัศน์ อย่างไรก็ตาม ผลิตภัณฑ์ของเรา เช่น APe15 และ MP10s ได้มอบประสิทธิภาพที่โดดเด่นในหลากหลายอุตสาหกรรม ตอบสนองความต้องการด้านระบบอัตโนมัติในอุตสาหกรรมที่หลากหลาย หากคุณกำลังมองหาโซลูชัน AGV อัจฉริยะเพื่อยกระดับการดำเนินงานของคุณ โปรดติดต่อ AiTEN วันนี้ เรามีบริการวิเคราะห์ความเป็นไปได้ฟรีที่ปรับให้เหมาะกับสภาพแวดล้อมการดำเนินงานเฉพาะของคุณ เพื่อช่วยคุณค้นหาโซลูชันระบบอัตโนมัติที่เหมาะสมที่สุดสำหรับการเปลี่ยนผ่านสู่โรงงานอัจฉริยะของคุณ

