








การเปิดตัวอัลกอริทึมการวางแผนเส้นทางแบบไดนามิกใน AGV
_%E7%94%BB%E6%9D%BF%201.avif)
ในอุตสาหกรรมคลังสินค้า โลจิสติกส์ และการผลิตสมัยใหม่ ยานยนต์นำทางอัตโนมัติ (AGV) กำลังได้รับความนิยมเพิ่มขึ้นเรื่อยๆ เช่นเดียวกับมดงานผู้ขยันขันแข็ง พวกมันสามารถนำทางในสภาพแวดล้อมที่ซับซ้อนได้โดยอัตโนมัติ และสามารถจัดการวัสดุได้อย่างมีประสิทธิภาพ หนึ่งในเทคโนโลยีหลักที่ช่วยให้ AGV สามารถนำทางได้อย่างชาญฉลาดคือการวางแผนเส้นทาง โดยเฉพาะอย่างยิ่งเมื่อสภาพแวดล้อมไม่คงที่ ความสามารถในการวางแผนเส้นทางแบบไดนามิกจึงมีความสำคัญอย่างยิ่ง บทความนี้จะเจาะลึกอัลกอริทึมการวางแผนเส้นทางแบบไดนามิกหลักๆ มากมาย (เช่น A, Dijkstra, RRT เป็นต้น) และอธิบายว่าอัลกอริทึมเหล่านี้สร้างผลกระทบอย่างมีนัยสำคัญต่ออุตสาหกรรม AGV อย่างไร
เหตุใดจึงจำเป็นต้องมีการวางแผนเส้นทางแบบไดนามิก?
การวางแผนเส้นทางแบบคงที่แบบดั้งเดิมนั้นถือว่าสภาพแวดล้อมเป็นที่ทราบแน่ชัดและยังคงไม่เปลี่ยนแปลงในขณะที่ AGV ดำเนินงาน อย่างไรก็ตาม โลกแห่งความเป็นจริงนั้นเต็มไปด้วยตัวแปรมากมาย:
- ปรากฏสิ่งกีดขวางชั่วคราวอย่างกะทันหัน (เช่น สินค้าตก คนเดินถนน หรือยานพาหนะอื่น)
- การเปลี่ยนแปลงพื้นที่ควบคุมการจราจร
- การปรับเปลี่ยนชั่วคราวเพื่อจุดเป้าหมายหรือภารกิจ
ในสถานการณ์เช่นนี้ AGV จำเป็นต้องสามารถรับรู้การเปลี่ยนแปลงของสภาพแวดล้อมแบบเรียลไทม์และวางแผนเส้นทางใหม่ได้อย่างรวดเร็ว นี่คือจุดที่การวางแผนเส้นทางแบบไดนามิกเข้ามามีบทบาท ซึ่งช่วยให้ AGV สามารถปรับตัวให้เข้ากับสถานการณ์ที่เปลี่ยนแปลงไปได้อย่างชาญฉลาด มั่นใจได้ว่า AGV จะสามารถทำงานได้อย่างปลอดภัยและมีประสิทธิภาพในสภาพแวดล้อมที่ซับซ้อนและมีการเปลี่ยนแปลงตลอดเวลา
การวิเคราะห์อัลกอริทึมการวางแผนเส้นทางหลัก
1. อัลกอริทึมของไดค์สตรา
อัลกอริทึมของ Dijkstra เป็นอัลกอริทึมการค้นหาข้อมูลกราฟแบบคลาสสิกที่ใช้ค้นหาเส้นทางที่สั้นที่สุดจากโหนดแหล่งที่มาเดียวไปยังโหนดอื่นๆ ทั้งหมดในกราฟ
แนวคิดหลัก:
โดยเริ่มจากโหนดต้นทาง อัลกอริทึมจะขยายออกไปเหมือนระลอกคลื่นในน้ำ แต่ละครั้งมันจะไปยังโหนดที่ยังไม่ได้เยี่ยมชมที่ใกล้ที่สุดของโหนดต้นทาง และอัปเดตระยะทางไปยังโหนดข้างเคียง
กระบวนการ
- การเริ่มต้น: ตั้งค่าระยะทางจากจุดเริ่มต้นเป็น 0 และระยะทางจากจุดอื่นๆ เป็นอนันต์ สร้างคิวลำดับความสำคัญของโหนดที่จะไปเยี่ยมชม (เรียงลำดับตามระยะทาง)
- การวนซ้ำ: ลบโหนด u ที่มีระยะห่างน้อยที่สุดจากคิว
- การผ่อนคลาย: สำหรับเพื่อนบ้าน v แต่ละตัวของ u หากเส้นทางจาก u ถึง v สั้นกว่า ให้ปรับปรุงระยะทางของ v และเพิ่มลงในคิว
- มาร์ค: ทำเครื่องหมายว่าคุณมาเยี่ยมแล้ว
- ทำซ้ำ: ดำเนินการต่อจนกว่าจะดึงโหนดเป้าหมายหรือคิวว่างเปล่า
การประยุกต์ใช้ AGV:
- ข้อดี: รับประกันการค้นหาเส้นทางที่สั้นที่สุดในโลก (เมื่อน้ำหนักขอบไม่เป็นลบ)
- ข้อเสีย: ระยะการค้นหากว้าง ไม่มีทิศทาง ประสิทธิภาพการคำนวณต่ำ (โดยเฉพาะบนแผนที่ขนาดใหญ่) อุปสรรคแบบไดนามิกจำเป็นต้องคำนวณเส้นทางทั่วโลกใหม่ ส่งผลให้ประสิทธิภาพแบบเรียลไทม์ต่ำ
- การวางตำแหน่ง: มักใช้เป็นรากฐานสำหรับอัลกอริทึมอื่นๆ (เช่น A*) หรือในสภาพแวดล้อมแบบง่าย
2. อัลกอริทึม A*
อัลกอริทึม A* (A-Star) คือการปรับปรุงประสิทธิภาพของอัลกอริทึม Dijkstra โดยนำข้อมูลฮิวริสติกมาใช้เพื่อกำหนดทิศทางการค้นหา ทำให้ค้นหาเป้าหมายได้รวดเร็วยิ่งขึ้น
แนวคิดหลัก: เมื่อเลือกโหนดถัดไปที่จะเยี่ยมชม ให้พิจารณาสิ่งต่อไปนี้พร้อมกัน:
- g(n): ต้นทุนเส้นทางจริงจากจุดเริ่มต้นไปยังโหนด n
- h(n): ต้นทุนที่ประมาณจากโหนด n ไปยังเป้าหมาย (ฟังก์ชันฮิวริสติก เช่น ระยะทางแมนฮัตตัน/ยุคลิด)
- ฟังก์ชันการประเมิน: f(n) = g(n) + h(n)
- ข้อกำหนดที่สำคัญ: h(n) ต้องเป็นไปตามความสามารถในการรับได้ (ค่าประมาณ ≤ ค่าจริง) และความสอดคล้องกันเพื่อให้แน่ใจว่าจะพบวิธีแก้ปัญหาที่เหมาะสมที่สุด
กระบวนการ: คล้ายกับ Dijkstra แต่คิวลำดับความสำคัญจะถูกเรียงลำดับตาม f(n) และโหนดที่มี f(n) เล็กที่สุดจะถูกจัดลำดับความสำคัญเพื่อการขยาย ทำให้การค้นหามีทิศทางไปสู่เป้าหมายมากขึ้น
การประยุกต์ใช้ AGV:
- ข้อดี: รับประกันเส้นทางที่ดีที่สุดเมื่อฟังก์ชันฮิวริสติกตรงตามเงื่อนไข และโดยทั่วไปจะมีประสิทธิภาพมากกว่า Dijkstra มาก นิยมใช้กันอย่างแพร่หลายในการวางแผนเส้นทางทั่วโลกของ AGV
- ข้อเสีย: ประสิทธิภาพการทำงานขึ้นอยู่กับการเลือกฟังก์ชันฮิวริสติก การใช้หน่วยความจำอาจสูง ยังคงต้องมีการวางแผนใหม่เมื่อสภาพแวดล้อมมีการเปลี่ยนแปลงบ่อยครั้ง
- รูปแบบไดนามิก: เพื่อจัดการกับสภาพแวดล้อมแบบไดนามิก มีอัลกอริทึมต่างๆ เช่น D*, LPA* และ D* Lite อัลกอริทึมเหล่านี้สามารถอัปเดตเส้นทางแบบค่อยเป็นค่อยไป (แทนที่จะคำนวณใหม่ทั้งหมด) เมื่อสภาพแวดล้อมเปลี่ยนแปลง ซึ่งช่วยเพิ่มความเร็วในการตอบสนองได้อย่างมาก D* Lite เป็นอัลกอริทึมที่นิยมใช้สำหรับการหลีกเลี่ยงสิ่งกีดขวางแบบไดนามิกในรถ AGV

3. อัลกอริทึม RRT*
RRT* (Rapidly-exploring Random Tree Star) เป็นอัลกอริธึมการวางแผนเส้นทางตามการสุ่ม ซึ่งเหมาะเป็นพิเศษสำหรับพื้นที่ที่มีมิติสูงและข้อจำกัดที่ซับซ้อน (เช่น จลนศาสตร์ของยานพาหนะ)
แนวคิดหลัก:
โดยการสุ่มตัวอย่างจุดต่างๆ ในสถานะสเปซ อัลกอริทึมจะค่อยๆ สร้างต้นไม้โดยเริ่มจากจุดเริ่มต้นเพื่อสำรวจพื้นที่นั้น RRT* เป็นเวอร์ชันที่ปรับให้เหมาะสมของ RRT ซึ่งประกอบด้วยขั้นตอนการเชื่อมต่อใหม่เพื่อให้เส้นทางเข้าใกล้ค่าที่เหมาะสมที่สุดแบบอะซิมโทซิส (ยิ่งมีจุดสุ่มตัวอย่างมากเท่าไหร่ เส้นทางก็จะยิ่งเข้าใกล้ค่าที่เหมาะสมที่สุดมากขึ้นเท่านั้น)
กระบวนการ:
- การสุ่มตัวอย่าง: สร้างจุด x_rand ในพื้นที่สถานะแบบสุ่ม
- ค้นหาเพื่อนบ้านที่ใกล้ที่สุด: ค้นหาโหนด x_nearest ในต้นไม้ที่ใกล้กับ x_rand ที่สุด
- ขยาย (บังคับเลี้ยว): ขยายความยาวของขั้นบันไดจาก x_nearest ไปยัง x_rand (หลีกเลี่ยงสิ่งกีดขวาง) เพื่อรับโหนดใหม่ x_new
- เลือกโหนดหลัก (เฉพาะ RRT*): ค้นหาโหนดใกล้กับ x_new และเลือกโหนด x_min ที่ลดต้นทุนเส้นทางทั้งหมดจากจุดเริ่มต้นไปยัง x_new เป็นโหนดหลัก (ต้องหลีกเลี่ยงการชนกัน)
- เชื่อมต่อใหม่ (เฉพาะ RRT*): ค้นหาโหนดใกล้ x_new หากการเชื่อมต่อผ่าน x_new ช่วยลดต้นทุนเส้นทางรวม ให้อัปเดตโหนดหลักของโหนดเหล่านี้เป็น x_new
- เพิ่ม: เพิ่ม x_new และขอบที่เชื่อมต่อไปยังต้นไม้
- ทำซ้ำ: ดำเนินการต่อจนกว่าต้นไม้จะขยายออกไปจนถึงบริเวณเป้าหมาย
การประยุกต์ใช้ AGV:
- ข้อดี: มีความสามารถที่แข็งแกร่งในการจัดการกับสถานะที่มีมิติสูง (ท่าทาง ความเร็ว ฯลฯ) และข้อจำกัดที่ซับซ้อน ไม่จำเป็นต้องมีแผนผังสภาพแวดล้อมที่ชัดเจน ความสมบูรณ์ตามความน่าจะเป็น (หากมีเส้นทางอยู่ ในที่สุดก็จะพบเส้นทางนั้น) RRT มีการทำงานที่เหมาะสมที่สุดแบบไม่แสดงอาการ
- ข้อเสีย: เส้นทางไม่เหมาะสมอย่างยิ่ง (ยกเว้นว่าจะใช้การสุ่มแบบไม่มีที่สิ้นสุด); เส้นทางอาจไม่ราบรื่น (ต้องมีการประมวลผลภายหลัง); ประสิทธิภาพการทำงานอ่อนไหวต่อพารามิเตอร์; การบรรจบกันอาจช้า
- ตัวแปรแบบไดนามิก เช่น RRT แบบไดนามิก ซึ่งทำการวางแผนใหม่โดยการลบ/อัปเดตส่วนต่างๆ ของต้นไม้ที่ชนกับอุปสรรคแบบไดนามิกและเติบโตต่อไป

การประยุกต์ใช้งานจริงของการวางแผนเส้นทางแบบไดนามิกใน AGV
สถานการณ์การใช้งาน AGV เพื่อหลีกเลี่ยงสิ่งกีดขวาง
ในการใช้งาน AGV จริงนั้น มักจะไม่ใช้อัลกอริทึมเดียวเพียงอย่างเดียว แต่จะใช้อัลกอริทึมหลายๆ ตัวร่วมกันแทน
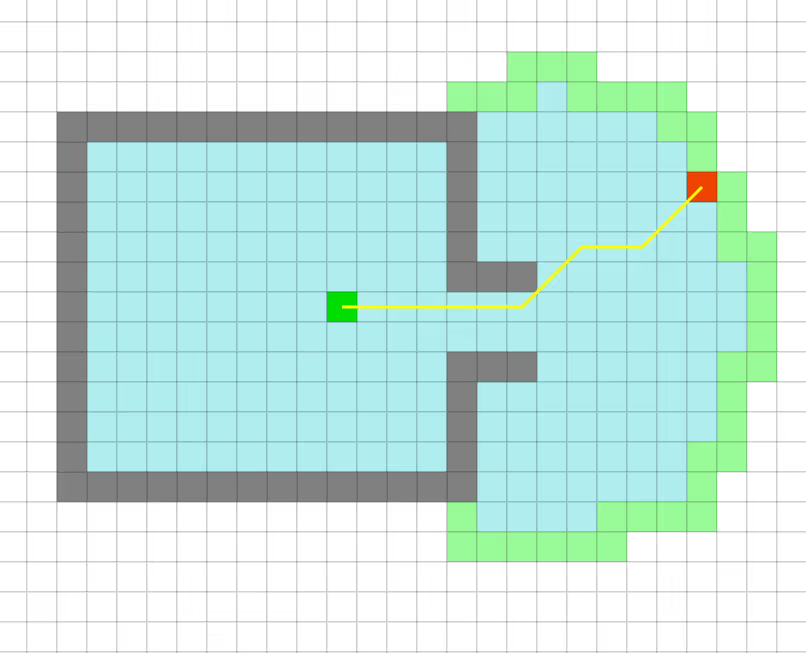
1. การวางแผนเส้นทางทั่วโลก:
การใช้ A* หรือตัวแปรอื่น ๆ ของ A* (เช่น D-Lite) หรือบางครั้งอาจใช้อัลกอริทึมของ Dijkstra เวอร์ชันที่ปรับให้เหมาะสมที่สุด จะช่วยวางแผนเส้นทางที่ดีที่สุดหรือเส้นทางที่ด้อยกว่าที่เหมาะสมที่สุดจากจุดเริ่มต้นไปยังจุดหมายปลายทางบนแผนที่ที่รู้จัก โดยทั่วไปเส้นทางนี้จะค่อนข้างอยู่ในระดับมหภาค
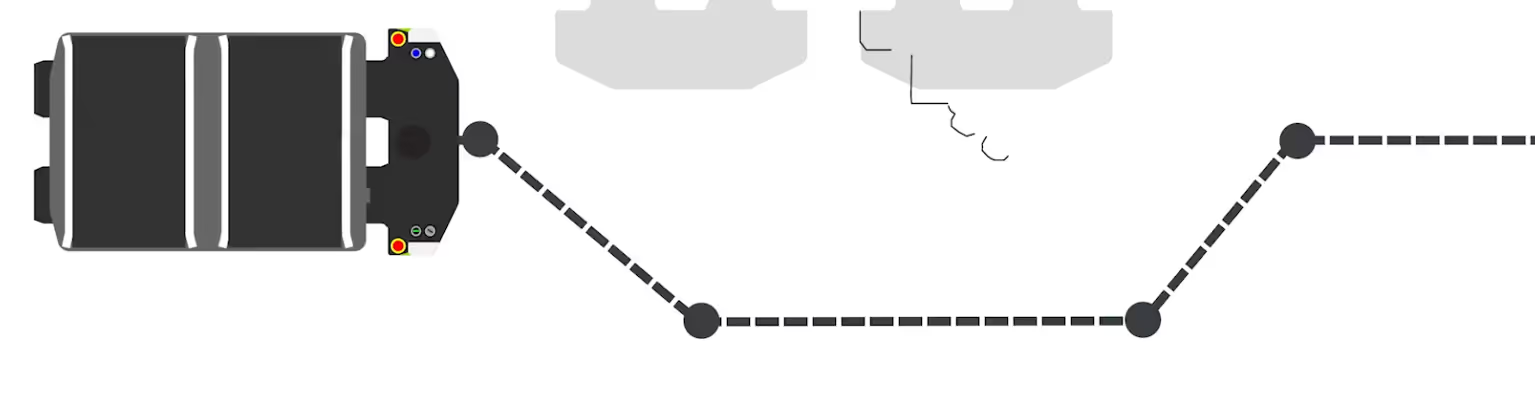
2. การวางแผนเส้นทางท้องถิ่น/การหลีกเลี่ยงอุปสรรคแบบไดนามิก:
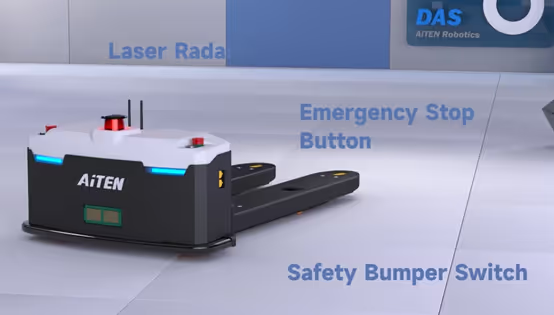
ขณะเคลื่อนที่ตามเส้นทางหลัก AGV จะใช้เซ็นเซอร์ (เช่น ไลดาร์ หรือกล้อง) เพื่อตรวจจับสภาพแวดล้อมโดยรอบอย่างต่อเนื่อง เมื่อตรวจพบสิ่งกีดขวางที่ไม่คาดคิด (แบบคงที่หรือแบบไดนามิก) ระบบวางแผนพื้นที่ (ซึ่งอาจใช้ DWA - Dynamic Window Approach, TEB - Timed Elastic Band หรือ A/RRT ที่มีการวางแผนใหม่อย่างรวดเร็ว) จะเข้ามาแทรกแซงเพื่อสร้างเส้นทางหลบหลีกสิ่งกีดขวางในพื้นที่ระยะสั้นที่ปลอดภัยและจำกัดด้วยจลนศาสตร์ของยานพาหนะ ภายใต้การนำทางของเส้นทางหลัก

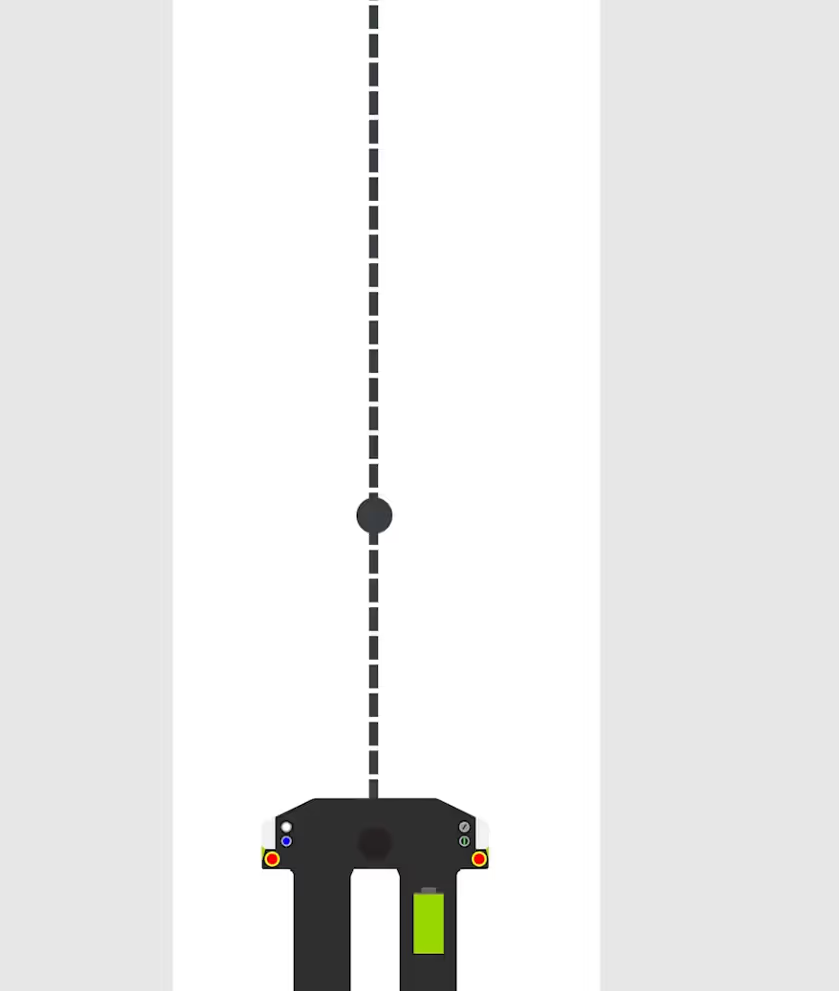
3. การติดตามเส้นทาง:
อัลกอริธึมการควบคุมมีหน้าที่รับผิดชอบในการขับเคลื่อน AGV ไปตามเส้นทางที่วางแผนไว้ (ไม่ว่าจะเป็นระดับโลกหรือระดับท้องถิ่น) อย่างแม่นยำ
กลยุทธ์การวางแผนแบบลำดับชั้นนี้สร้างสมดุลระหว่างประสิทธิภาพการทำงานโดยรวมและประสิทธิภาพการทำงานแบบเรียลไทม์เฉพาะที่ อัลกอริทึมอย่าง D Lite โดดเด่นในการจัดการการเปลี่ยนแปลงแบบไดนามิกเฉพาะที่ เนื่องจากมีความสามารถในการวางแผนใหม่แบบค่อยเป็นค่อยไปที่มีประสิทธิภาพ ในทางกลับกัน RRT และตัวแปรอื่นๆ มีข้อได้เปรียบมากกว่าในการจัดการสภาพแวดล้อมที่ซับซ้อนและข้อจำกัดด้านการเคลื่อนไหว
ความท้าทายและแนวโน้มในอนาคต
1. ความท้าทาย
แม้ว่าจะมีความก้าวหน้าอย่างมากในเทคโนโลยีการวางแผนเส้นทางแบบไดนามิก แต่ความท้าทายในการใช้งานในอุตสาหกรรม AGV ยังคงอยู่:
- ข้อกำหนดแบบเรียลไทม์: โดยเฉพาะอย่างยิ่งในการทำงานความเร็วสูงหรือสถานการณ์การจราจรหนาแน่น อัลกอริทึมจะต้องทำการคำนวณให้เสร็จภายในไม่กี่มิลลิวินาที
- ความไม่แน่นอนด้านสิ่งแวดล้อม: สัญญาณรบกวนของเซ็นเซอร์ ข้อผิดพลาดในการวางตำแหน่ง และความยากลำบากในการคาดการณ์อุปสรรคแบบไดนามิก
- การประสานงาน AGV หลายตัว: หลีกเลี่ยงความขัดแย้งและทางตันเพื่อให้บรรลุความร่วมมือที่มีประสิทธิภาพ
- ข้อจำกัดด้านจลนศาสตร์ที่ซับซ้อน: พิจารณาขนาดของ AGV รัศมีการเลี้ยว และประสิทธิภาพการเร่ง/ลดความเร็ว
2. แนวโน้มในอนาคต
ในอนาคต การวางแผนเส้นทางแบบไดนามิกจะพัฒนาไปสู่โซลูชันที่ชาญฉลาดและมีประสิทธิภาพมากขึ้น:
- การบูรณาการการเรียนรู้ของเครื่องจักร: การใช้การเรียนรู้แบบเสริมแรง การเรียนรู้เลียนแบบ และวิธีการอื่นๆ เพื่อให้ AGV สามารถเรียนรู้กลยุทธ์การนำทางที่เหมาะสมที่สุดโดยอัตโนมัติ
- การวางแผนเชิงคาดการณ์: คาดการณ์เจตนาและเส้นทางของอุปสรรคแบบไดนามิกอื่นๆ (เช่น คนเดินถนนและยานพาหนะ) เพื่อวางแผนล่วงหน้า
- ความเข้าใจเชิงความหมาย: ช่วยให้ AGV เข้าใจข้อมูลเชิงความหมายในสภาพแวดล้อม (เช่น 'ทางเท้า' และ 'โซนชาร์จ') เพื่อตัดสินใจได้เหมาะสมกับสถานการณ์มากขึ้น
- ความร่วมมือระหว่างมนุษย์กับเครื่องจักร: บรรลุการโต้ตอบและการหลีกเลี่ยงที่ปลอดภัยและเป็นธรรมชาติยิ่งขึ้นในสภาพแวดล้อมการอยู่ร่วมกันระหว่างมนุษย์กับเครื่องจักร
บทสรุป
Dijkstra, A, RRT และตัวแปรแบบไดนามิกเป็นเครื่องมือหลักในคลังอัลกอริทึมการวางแผนเส้นทางแบบไดนามิกของ AGV พวกมันทำหน้าที่เป็น 'ดวงตาอัจฉริยะ' และ 'พวงมาลัยแบบไดนามิก' ของ AGV ช่วยให้นำทางในสภาพแวดล้อมที่ซับซ้อนได้อย่างยืดหยุ่นและมีประสิทธิภาพ การทำความเข้าใจหลักการและคุณลักษณะของอัลกอริทึมเหล่านี้เป็นสิ่งสำคัญอย่างยิ่งต่อการพัฒนาเทคโนโลยี AGV และระบบอัตโนมัติในวงกว้าง เมื่ออัลกอริทึมมีวิวัฒนาการและพลังการประมวลผลดีขึ้น AGV ในอนาคตจะมีความชาญฉลาด น่าเชื่อถือ และมีประสิทธิภาพมากขึ้นอย่างไม่ต้องสงสัย
AiTEN Robotics มีสำนักงานใหญ่อยู่ที่เมืองซูโจว ประเทศจีน เป็นผู้นำระดับโลกด้านยานยนต์อุตสาหกรรมไร้คนขับ (AMR/AGV) และโซลูชันระบบอัตโนมัติด้านโลจิสติกส์ AiTEN Robotics ได้พัฒนาผลิตภัณฑ์สิบซีรีส์เพื่อตอบสนองความต้องการด้านการจัดการวัสดุแบบครบวงจร AiTEN Robotics ได้ดำเนินโครงการมากกว่า 200 โครงการในกว่า 30 ประเทศและภูมิภาค และได้รับความไว้วางใจจากบริษัท Fortune 500 มากมายในอุตสาหกรรมต่างๆ เช่น ยานยนต์ อาหารและเครื่องดื่ม เคมีภัณฑ์ ยา การผลิต และโลจิสติกส์จากภายนอก ซึ่งช่วยยกระดับความปลอดภัยในการปฏิบัติงาน ประสิทธิภาพ และความพร้อมในอนาคต

