








เทคโนโลยีการวางตำแหน่งพาเลทหุ่นยนต์รถยก: กุญแจสำคัญในการจัดการที่แม่นยำ
_%E7%94%BB%E6%9D%BF%201.avif)
ด้วยการพัฒนาที่รวดเร็วของโลจิสติกส์อัจฉริยะและการผลิตอัจฉริยะ การเปลี่ยนแปลงอัจฉริยะจึงกลายเป็นเส้นทางสำคัญในการเพิ่มประสิทธิภาพและลดต้นทุน หุ่นยนต์รถยก ( AGV/AMR ) กำลังถูกนำไปใช้อย่างแพร่หลายมากขึ้นในคลังสินค้า การผลิต การค้าปลีก และอุตสาหกรรมอื่นๆ
เทคโนโลยีการวางตำแหน่งพาเลทเป็นหนึ่งในปัจจัยสำคัญที่ช่วยให้การดำเนินงานมีประสิทธิภาพและมีเสถียรภาพ ความแม่นยำและความน่าเชื่อถือของเทคโนโลยีนี้ส่งผลโดยตรงต่อประสิทธิภาพการดำเนินงานโดยรวมของระบบโลจิสติกส์อัตโนมัติ ในบทความนี้ เราจะวิเคราะห์หลักการของเทคโนโลยีการวางตำแหน่ง พาเลทด้วยหุ่นยนต์รถยก เส้นทางเทคโนโลยีหลัก และข้อดีและความท้าทายในการใช้งานจริง
เทคโนโลยีการวางตำแหน่งพาเลทหุ่นยนต์รถยกคืออะไร?
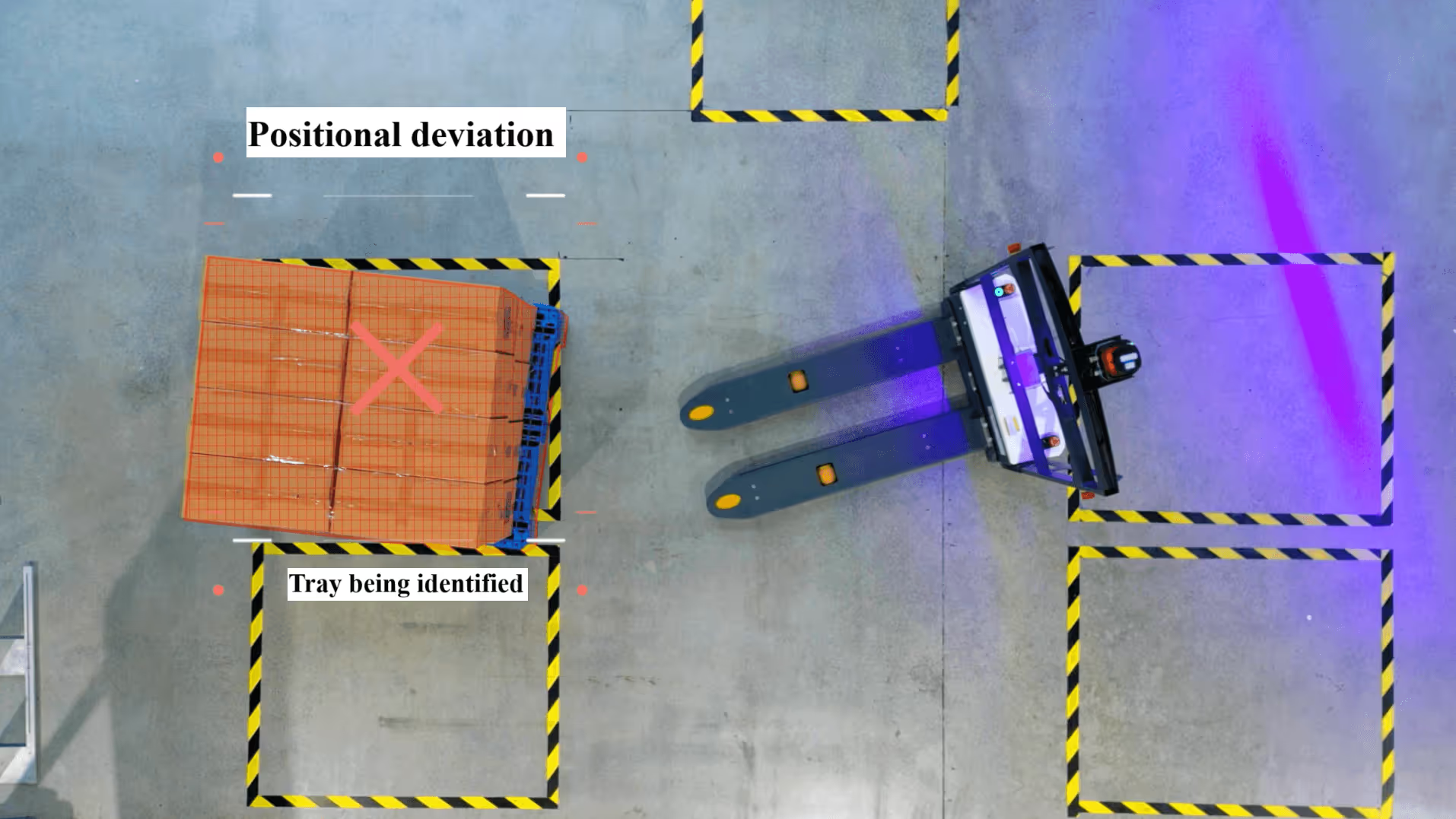
เทคโนโลยีการจัดวางพาเลทของหุ่นยนต์รถยก หมายถึงความสามารถของหุ่นยนต์ในการระบุ เทียบท่า และยกพาเลทได้อย่างแม่นยำในระหว่างการขนย้าย เทคโนโลยีนี้เกี่ยวข้องกับการระบุตำแหน่งเชิงพื้นที่ของพาเลท การประเมินทิศทาง การปรับไดนามิก และการปรับปรุงเส้นทางเดินรถ รวมถึงปัจจัยอื่นๆ ซึ่งส่งผลโดยตรงต่อประสิทธิภาพในการขนย้ายและความปลอดภัยในการปฏิบัติงาน
กล่าวโดยสรุป คือกระบวนการของหุ่นยนต์ยกที่ใช้เซ็นเซอร์ขั้นสูงและอัลกอริทึมอัจฉริยะ เพื่อระบุตำแหน่งและท่าทาง (ทิศทางและมุมเอียง) ของพาเลทโดยอัตโนมัติ และจัดวางพาเลทให้ถูกต้องแม่นยำในสภาพแวดล้อมคลังสินค้าที่ซับซ้อนและมีการเปลี่ยนแปลงตลอดเวลา เป้าหมายคือเพื่อให้แน่ใจว่าสามารถสอดง่ามส้อมเข้าไปในรถยกพาเลทได้อย่างปลอดภัย มั่นคง และมีประสิทธิภาพ
เหตุใด “การวางตำแหน่งพาเลท” จึงมีความสำคัญ?
สภาพแวดล้อมด้านโลจิสติกส์และการจัดเก็บสินค้ามีความซับซ้อนเพิ่มมากขึ้น โดยมีสินค้าหลากหลายชนิด ข้อกำหนดพาเลทที่แตกต่างกัน และสถานการณ์ปฏิบัติการที่ต้องการประสิทธิภาพและความแม่นยำสูง
พาเลทเป็นหน่วยการจัดการที่เล็กที่สุดในระบบโลจิสติกส์คลังสินค้า หากหุ่นยนต์รถยก (รวมถึง AGV/AMR) ไม่สามารถหาตำแหน่งรูของพาเลทได้อย่างรวดเร็วและแม่นยำ จะเกิดปัญหาต่างๆ เช่น การเอียงของส้อม การตก และการปรับตำแหน่งรอง ซึ่งจะส่งผลโดยตรงต่อผลตอบแทนจากการลงทุน ดังนั้น เทคโนโลยีการจัดวางพาเลทที่มีความแม่นยำสูงและความล่าช้าต่ำจึงกลายเป็นปัญหาสำคัญในการลงจอดของรถยกไร้คนขับขนาดใหญ่
- ความปลอดภัยต้องมาก่อน: การเบี่ยงเบนตำแหน่งอาจทำให้หุ่นยนต์รถยกไปชนกับพาเลท ชั้นวาง หรืออุปกรณ์และสิ่งอำนวยความสะดวกอื่นๆ และอาจทำให้สินค้าพลิกคว่ำหรือมีความเสี่ยงต่อการบาดเจ็บของบุคลากรได้
- ประสิทธิภาพ: การวางตำแหน่งที่แม่นยำหมายความว่าหุ่นยนต์รถยกสามารถหยิบหรือวางส้อมในที่เดียวได้อย่างรวดเร็วและแม่นยำ หลีกเลี่ยงการปรับซ้ำและการเสียเวลา ช่วยปรับปรุงประสิทธิภาพของการดำเนินการด้านโลจิสติกส์ได้อย่างมาก
- เสถียรและเชื่อถือได้: ระบบอัตโนมัติต้องรับประกันผลลัพธ์ของการดำเนินการแต่ละครั้งที่เสถียรและเชื่อถือได้ และการวางตำแหน่งที่แม่นยำถือเป็นรากฐานและข้อกำหนดเบื้องต้นสำหรับรถยกไร้คนขับเพื่อให้ทำงานได้อย่างมีประสิทธิภาพต่อไป
- ลดการแทรกแซงของมนุษย์: การแทรกแซงของมนุษย์บ่อยครั้งในคลังสินค้าอัตโนมัติหมายความว่าไม่สามารถปลดปล่อยคุณค่าของระบบอัตโนมัติได้อย่างแท้จริง และการวางตำแหน่งที่แม่นยำเป็นเงื่อนไขที่จำเป็นเพื่อให้แน่ใจว่าการทำงานอัตโนมัติเต็มรูปแบบจะดำเนินต่อไปอย่างต่อเนื่อง
ในเวลาเดียวกัน การวางตำแหน่งพาเลทที่แม่นยำจะช่วยเพิ่มประสิทธิภาพการใช้พื้นที่คลังสินค้าและบรรลุการจัดเก็บสินค้าที่มีความหนาแน่นสูงผ่านการดำเนินการซ้อนที่แม่นยำ
เส้นทางเทคโนโลยีการวางตำแหน่งพาเลทหลัก
ตามสถานการณ์การใช้งานที่แตกต่างกันและข้อกำหนดความแม่นยำ หุ่นยนต์รถยกในปัจจุบันใช้เทคโนโลยีการระบุตำแหน่งพาเลทประเภทต่อไปนี้เป็นหลัก:
1. การระบุตำแหน่งการสร้างแผนที่ LiDAR + SLAM
- หลักการ: ใช้ LiDAR แบบ 2 มิติหรือ 3 มิติเพื่อสร้างแผนที่สภาพแวดล้อมและการวางตำแหน่งแบบเรียลไทม์ของหุ่นยนต์รถยก โดยผสานกับการจดจำรูปร่างพาเลทเพื่อการวางตำแหน่งที่แม่นยำ
- ข้อดี: ไม่ต้องพึ่งเครื่องหมายสิ่งแวดล้อม ปรับตัวได้ดี
- สถานการณ์การใช้งาน: คลังสินค้าขนาดกลางและขนาดใหญ่ โรงงานอุตสาหกรรม

2. การจดจำภาพ (RGB/กล้องความลึก)
- หลักการ: รับข้อมูลภาพหรือความลึกผ่านกล้องเพื่อจดจำรถลากพาเลท ฉลาก หรือขอบโปรไฟล์
- ข้อดี: มีความแม่นยำสูง เหมาะสำหรับการระบุพาเลทที่ซับซ้อน เช่น พาเลทมาตรฐานยุโรป/อเมริกาแบบผสม
- ความท้าทาย: มีความไวต่อแสง ต้องใช้การรองรับอัลกอริทึมภาพประสิทธิภาพสูง
3. รหัส QR/ตัวสะท้อนแสง + เครื่องหมายบอกตำแหน่งการนำทาง
หลักการ: ตั้งค่ารหัส QR เครื่องหมายสะท้อนแสง และป้ายเสริมอื่นๆ บนพาเลทหรือพื้นที่บรรทุกสินค้าเพื่อปรับปรุงเสถียรภาพในการวางตำแหน่ง
- ข้อดี: การวางตำแหน่งที่เชื่อถือได้ ต้นทุนการใช้งานต่ำ
- สถานการณ์ที่ใช้ได้: คลังสินค้าสินค้าคงที่, สายการผลิต, การเชื่อมต่อสาย
4. การระบุตำแหน่งฟิวชั่นหลายเซ็นเซอร์
- หลักการ: การผสมผสานของ LIDAR, วิสัยทัศน์, IMU, อัลตราโซนิก และเซ็นเซอร์อื่นๆ เพื่อให้ได้การระบุตำแหน่งที่มีความทนทานสูง
- ข้อดี: เพื่อรับมือกับความท้าทายของการอุดตัน การเปลี่ยนแปลงของแสง เส้นทางที่ซับซ้อน ฯลฯ
- แนวโน้ม: ทิศทางหลักของการพัฒนาหุ่นยนต์โฟล์คลิฟท์ระดับไฮเอนด์
แผนผังกระบวนการวางตำแหน่งพาเลท
- นำทางไปยังตำแหน่งเป้าหมาย - ใช้แผนที่หรือระบบนำทางแบบเส้นทางคงที่เพื่อนำทางรถยกไปยังบริเวณใกล้เคียงของพาเลท
- การวางตำแหน่งพาเลท - ระบุจุดศูนย์กลางและทัศนคติของพาเลทแบบเรียลไทม์ผ่านเซ็นเซอร์เพื่อกำหนดตำแหน่งของแม่แรง
- การปรับทัศนคติและการใส่ - ระบบจะควบคุมแขนรถยกเพื่อปรับละเอียดในการใส่และยกพาเลทอย่างแม่นยำ
- การจัดการและการขนถ่าย - เมื่อใช้ร่วมกับระบบนำทางจุดเป้าหมาย ระบบจะดำเนินการจัดการและขนถ่ายพาเลทอย่างปลอดภัย
ความท้าทายทั่วไปและทิศทางการเพิ่มประสิทธิภาพ
แม้ว่าจะมีความก้าวหน้าอย่างมากในเทคโนโลยีการวางตำแหน่งพาเลทสำหรับหุ่นยนต์รถยก แต่ยังคงมีความท้าทายบางประการในการใช้งานจริง
ประการแรก ความหลากหลายของพาเลทเป็นปัญหาสำคัญ พาเลทที่ใช้ในอุตสาหกรรมและองค์กรต่างๆ มีขนาด รูปร่าง วัสดุ ฯลฯ ที่แตกต่างกัน ซึ่งนำมาซึ่งความท้าทายต่อความหลากหลายของเทคโนโลยีการจัดวางตำแหน่ง ตัวอย่างเช่น อุตสาหกรรมเฉพาะทางบางแห่งอาจใช้พาเลทที่ออกแบบเฉพาะ ซึ่งยากต่อการปรับเปลี่ยนด้วยเทคนิคการจัดวางตำแหน่งแบบดั้งเดิม
ประการที่สอง สภาพแวดล้อมการทำงานที่ซับซ้อนยังทำให้เทคโนโลยีการจัดตำแหน่งต้องถูกทดสอบอีกด้วย อาจมีแสงไม่เพียงพอ ฝุ่นมากขึ้น และสินค้าอุดตันในคลังสินค้า ซึ่งส่งผลต่อความแม่นยำและเสถียรภาพของการจัดตำแหน่ง
เพื่อรับมือกับความท้าทายเหล่านี้ ในด้านหนึ่ง เจ้าหน้าที่ฝ่ายวิจัยและพัฒนาของ AiTEN ได้ปรับปรุงอัลกอริทึมการจัดตำแหน่งและพัฒนาความสามารถในการปรับตัวอย่างต่อเนื่อง เพื่อให้สามารถรองรับพาเลทประเภทต่างๆ ได้ ตัวอย่างเช่น มีการใช้วิธีการผสานรวมข้อมูลหลายโหมดเพื่อผสานและวิเคราะห์ข้อมูลจากเซ็นเซอร์หลายตัว เช่น เซ็นเซอร์ภาพและ LiDAR เพื่อระบุและระบุตำแหน่งของพาเลทได้แม่นยำยิ่งขึ้น
ในทางกลับกัน การพัฒนาอุปกรณ์ฮาร์ดแวร์ได้รับการปรับปรุงเพื่อเพิ่มประสิทธิภาพในการป้องกันสัญญาณรบกวนของอุปกรณ์ ตัวอย่างเช่น การพัฒนากล้องที่มีความละเอียดสูงขึ้นและป้องกันสัญญาณรบกวน รวมถึง LiDAR ที่สามารถทำงานได้อย่างเสถียรในสภาพแวดล้อมที่รุนแรง ขณะเดียวกัน การสร้างฐานข้อมูลพาเลทเพื่อจัดเก็บและจัดการคุณลักษณะของพาเลทประเภทต่างๆ ช่วยให้ระบบสามารถจับคู่และระบุพาเลทใหม่ได้อย่างรวดเร็วเมื่อพบพาเลทใหม่ ซึ่งช่วยเพิ่มความแม่นยำและประสิทธิภาพในการจัดวางตำแหน่ง
แนวโน้มในอนาคตของเทคโนโลยีการวางตำแหน่งพาเลท
ในอนาคต เทคโนโลยีการวางตำแหน่งพาเลทด้วยหุ่นยนต์รถยกจะพัฒนาไปในทิศทางที่ชาญฉลาด แม่นยำ และมีประสิทธิภาพมากขึ้น ด้วยความก้าวหน้าอย่างต่อเนื่องของเทคโนโลยีปัญญาประดิษฐ์ โมเดลการเรียนรู้เชิงลึกจะมีความชาญฉลาดมากขึ้น สามารถเรียนรู้และปรับตัวเข้ากับสภาพแวดล้อมและพาเลทที่ซับซ้อนได้โดยอัตโนมัติ ช่วยเพิ่มความแม่นยำและความเร็วในการวางตำแหน่ง ขณะเดียวกัน เทคโนโลยีการรวมเซ็นเซอร์หลายตัวจะถูกนำมาใช้อย่างแพร่หลายมากขึ้น เพื่อการวางตำแหน่งพาเลทได้อย่างแม่นยำและครอบคลุมทุกด้าน ผ่านการรวมข้อมูลจากเซ็นเซอร์หลากหลายชนิด เช่น เซ็นเซอร์ภาพ เซ็นเซอร์ LiDAR เซ็นเซอร์อัลตราโซนิก และอื่นๆ
- การเสริมพลัง AI อย่างล้ำลึก: การเรียนรู้เชิงลึกจะมีบทบาทมากขึ้นในการตรวจจับเป้าหมาย การประมาณทัศนคติ และการประมวลผลความผิดปกติ และปรับปรุงระดับของสติปัญญา
- การเจาะลึกการหลอมรวมหลายโหมด: เลเซอร์ วิสัยทัศน์ เรดาร์ IMU และอัลกอริทึมการหลอมรวมเซ็นเซอร์อื่น ๆ จะมีความชาญฉลาดมากขึ้น
- การสร้างมาตรฐานและการแบ่งส่วน: อินเทอร์เฟซและโซลูชันเทคโนโลยีการวางตำแหน่งจะมีมาตรฐานและสร้างส่วนแยกเพื่อให้บูรณาการและใช้งานได้ง่าย
- การเพิ่มประสิทธิภาพในการป้องกันการเกิดการรบกวน: การปรับปรุงเสถียรภาพในการวางตำแหน่งในสภาพแสงที่ซับซ้อน ฝุ่น การเสียรูปของพาเลท การบดบังบางส่วน และสถานการณ์ทางอุตสาหกรรมอื่นๆ ถือเป็นกุญแจสำคัญในการเพิ่มมูลค่าของระบบบนพื้นดิน
เทคโนโลยีการวางตำแหน่งจะถูกบูรณาการอย่างลึกซึ้งยิ่งขึ้นกับฟังก์ชันอื่นๆ ของหุ่นยนต์รถยก เช่น การวางแผนเส้นทาง การหลีกเลี่ยงสิ่งกีดขวาง ฯลฯ เพื่อให้บรรลุกระบวนการทั้งหมดของการทำงานอัจฉริยะของหุ่นยนต์รถยก และให้การสนับสนุนทางเทคนิคที่แข็งแกร่งยิ่งขึ้นสำหรับการพัฒนาอัจฉริยะของอุตสาหกรรมโลจิสติกส์และการจัดเก็บสินค้า
บทสรุป
เทคโนโลยีการวางตำแหน่งพาเลทเป็นตัวกำหนดความสามารถในการปฏิบัติงาน ความปลอดภัยในการทำงาน และระดับประสิทธิภาพการทำงานของหุ่นยนต์ในสภาพแวดล้อมอุตสาหกรรมที่ซับซ้อนโดยตรง ด้วยการพัฒนาของ AI เทคโนโลยีการรับรู้ และการควบคุม ความสามารถในการวางตำแหน่งพาเลทของหุ่นยนต์รถยกจะได้รับการพัฒนาอย่างต่อเนื่อง ช่วยให้องค์กรต่างๆ ก้าวไปสู่การลดต้นทุนและเพิ่มประสิทธิภาพได้อย่างมั่นคงยิ่งขึ้น
เกี่ยวกับ AiTEN Robotics
ในฐานะบริษัทที่เชี่ยวชาญด้านโซลูชันโลจิสติกส์อัจฉริยะ AiTEN Robotics ให้ความสำคัญกับสถานการณ์ "โรงงานอัจฉริยะ" อย่างต่อเนื่อง โดยผสานรวมนวัตกรรมเทคโนโลยีเข้ากับความต้องการของอุตสาหกรรมอย่างลึกซึ้ง บริษัทให้บริการที่ครอบคลุมแก่ลูกค้าภาคการผลิตกว่า 200 รายทั่วโลก ด้วยกลุ่มผลิตภัณฑ์หุ่นยนต์ขนย้ายวัสดุที่หลากหลาย ครอบคลุมสถานการณ์การขนย้ายวัสดุที่หลากหลาย เราได้พัฒนาระบบจัดตารางงานอัจฉริยะระดับอุตสาหกรรม เพื่อให้สามารถทำงานร่วมกันระหว่างอุปกรณ์ต่างๆ ได้อย่างมีประสิทธิภาพ ด้วยระบบบริการตลอดวงจรชีวิตที่ครอบคลุม ตั้งแต่การวางแผนก่อนการขาย การนำไปใช้งาน ไปจนถึงการปรับปรุงประสิทธิภาพการดำเนินงาน เราช่วยให้องค์กรต่างๆ สามารถบรรลุการเปลี่ยนแปลงด้านข้อมูลอัจฉริยะด้านโลจิสติกส์ ขับเคลื่อนการพัฒนาระบบดิจิทัลและการพัฒนาคุณภาพสูงของอุตสาหกรรมการผลิตอย่างต่อเนื่อง
ติดต่อเรา เพื่อสำรวจโซลูชันระบบอัตโนมัติสำหรับโรงงานของคุณ

