








รถยก AGV ทำการวางแผนเส้นทางอย่างไร?
_%E7%94%BB%E6%9D%BF%201.avif)
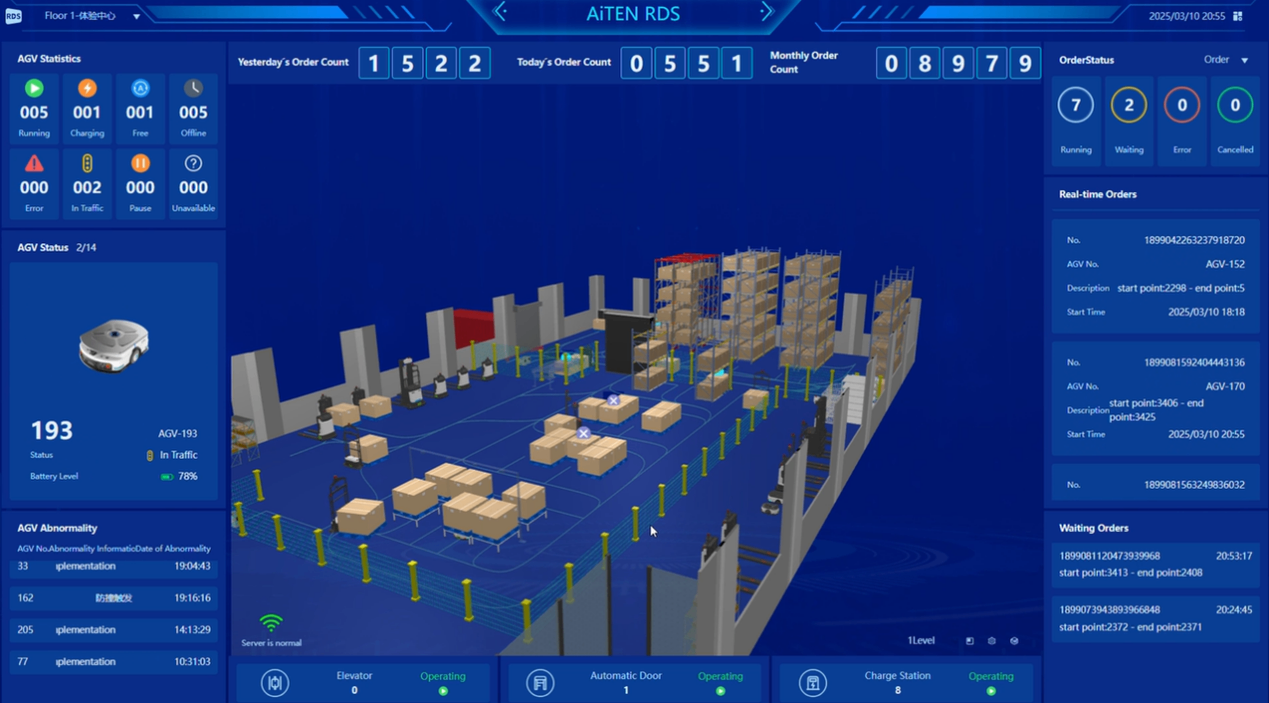
ในอุตสาหกรรมโลจิสติกส์และระบบอัตโนมัติทางอุตสาหกรรมสมัยใหม่ ยานยนต์นำทางอัตโนมัติ (AGV) ได้กลายเป็นเทคโนโลยีหลัก ยานยนต์นำทางอัตโนมัติเหล่านี้มีบทบาทสำคัญในการลดความซับซ้อนของกระบวนการขนถ่ายวัสดุ เพิ่มประสิทธิภาพ และลดความผิดพลาดของมนุษย์ พวกมันสามารถทำงานขนถ่ายวัสดุได้โดยไม่ต้องมีการแทรกแซงจากมนุษย์ และหนึ่งในเทคโนโลยีสำคัญที่อยู่เบื้องหลังสิ่งนี้คือการวางแผนเส้นทาง แล้วรถยก AGV วางแผนเส้นทางได้อย่างไร?
การวางแผนเส้นทาง AGV คืออะไร?
พูดอย่างง่าย ๆ การวางแผนเส้นทางคือการค้นหาเส้นทางที่เหมาะสมที่สุดหรือเส้นทางที่ไม่มีการชนกันสำหรับ AGV ที่จะเดินทางจากจุดเริ่มต้น (จุด A) ไปยังจุดหมายปลายทาง (จุด B) ในสภาพแวดล้อมการทำงานที่มีสิ่งกีดขวาง (ชั้นวาง สถานีงาน และ AGV อื่นๆ) การวางแผนเส้นทางที่มีประสิทธิภาพช่วยให้ AGV สามารถทำงานได้อย่างสอดประสานกับสภาพแวดล้อมโดยรอบ เพิ่มผลผลิตสูงสุดและลดระยะเวลาหยุดทำงานให้น้อยที่สุด
ความสำคัญของมันเป็นสิ่งที่เห็นได้ชัด:
- ประสิทธิภาพที่เพิ่มขึ้น: เส้นทางที่ดีที่สุดหมายถึงเวลาในการทำงานที่สั้นลงและปริมาณงานที่สูงขึ้น
- รับประกันความปลอดภัย: หลีกเลี่ยงการชนกันระหว่าง AGV ระหว่าง AGV กับผู้คนหรืออุปกรณ์ และรับประกันความปลอดภัยของผู้คน เครื่องจักร และสินค้า
- ลดต้นทุน: ลดระยะทางที่ไม่จำเป็น ประหยัดพลังงาน และยืดอายุการใช้งานอุปกรณ์
- การประสานงานระบบ: อนุญาตให้ AGV หลายตัวทำงานร่วมกันเป็นหนึ่งเดียวเพื่อให้แน่ใจว่าระบบทั้งหมดทำงานได้อย่างราบรื่น
วิธีการหลักของการวางแผนเส้นทาง AGV
การวางแผนเส้นทางไม่ใช่กระบวนการแบบขั้นตอนเดียว แต่โดยทั่วไปแล้วเป็นกระบวนการตัดสินใจแบบไดนามิกที่มีหลายชั้น
1. การวางแผนเส้นทางแบบรางคงที่
แถบแม่เหล็ก, รหัส QR หรือแทร็กแม่เหล็กไฟฟ้า ใช้สำหรับการนำทาง
ข้อดี: มีเสถียรภาพและเชื่อถือได้ เหมาะสำหรับโรงงานและโกดังที่มีรูปแบบคงที่
ข้อเสีย : ขาดความยืดหยุ่น ต้องปูทางใหม่เมื่อเปลี่ยนเส้นทาง
2. การวางแผนเส้นทางเดินเรือตามแผนที่
ด้วยความช่วยเหลือของเทคโนโลยี เช่น LiDAR และ SLAM แบบภาพ AGV สามารถสร้างแผนที่สภาพแวดล้อมและระบุตำแหน่งของตัวเองได้แบบเรียลไทม์
ข้อดี: มีความยืดหยุ่นสูง ปรับให้เข้ากับสภาพแวดล้อมแบบไดนามิก และสามารถนำทางแบบไร้ร่องรอยได้
ข้อเสีย: ความต้องการพลังการประมวลผลและความแม่นยำของเซ็นเซอร์สูง และมีต้นทุนค่อนข้างสูง
3. การวางแผนเส้นทางทั่วโลก
นี่คือการออกแบบระดับสูงสุดที่ดำเนินการก่อนเริ่มงาน ระบบจะคำนวณเส้นทางที่เหมาะสมที่สุดตามทฤษฎีสำหรับ AGV โดยอ้างอิงจากแผนที่โลกแบบคงที่ที่ทราบแล้ว (รวมถึงพื้นที่ที่มีสิ่งกีดขวางคงที่ทั้งหมด) ทั่วทั้งแผนที่โรงงานหรือคลังสินค้า ระบบ AGV จะคำนวณเส้นทางที่เหมาะสมที่สุดทั่วโลกล่วงหน้าตั้งแต่จุดเริ่มต้นไปจนถึงจุดสิ้นสุด
อัลกอริทึมทั่วไป: อัลกอริทึม A-Star, อัลกอริทึม Dijkstra, อัลกอริทึม Rapidly Expanding Random Tree (RRT)
คุณสมบัติ: การวางแผนเส้นทางที่เหมาะสม เหมาะสำหรับการจัดสรรงานขนาดใหญ่
4. การวางแผนเส้นทางท้องถิ่น
การปรับแบบเรียลไทม์จะเกิดขึ้นระหว่างการทำงานเพื่อหลีกเลี่ยงสิ่งกีดขวางฉับพลันหรือการรบกวนแบบไดนามิก
ในการทำงานจริง ย่อมต้องพบเจออุปสรรคที่ไม่อาจหลีกเลี่ยงได้ เช่น คนงานปรากฏตัวขึ้นอย่างกะทันหัน พาเลทที่วางชั่วคราว หรือรถ AGV เคลื่อนที่อื่นๆ ในกรณีเช่นนี้ จำเป็นต้องมีการวางแผนในระดับท้องถิ่น
วิธีการทั่วไป: วิธีสนามศักยภาพเทียม วิธีหน้าต่างไดนามิก
คุณสมบัติ: ปรับปรุงความปลอดภัยและความสามารถในการปรับตัว แต่เส้นทางอาจไม่เหมาะสมในระดับโลก
ขั้นตอนการดำเนินการสำหรับการวางแผนเส้นทาง AGV
กระบวนการวางแผนเส้นทางที่สมบูรณ์โดยทั่วไปจะรวมการวางแผนระดับโลกและระดับท้องถิ่น โดยมีขั้นตอนเฉพาะดังต่อไปนี้:
1. การวิเคราะห์ความต้องการ: การกำหนดงานด้าน WMS/MES เช่น จุดเริ่มต้น จุดสิ้นสุด ความสามารถในการโหลด ฯลฯ
2. การสร้างแบบจำลองสภาพแวดล้อม: การใช้เทคโนโลยี SLAM เพื่อสร้างแผนที่สองมิติหรือสามมิติของสภาพแวดล้อมการทำงาน และการทำเครื่องหมายจุดสำคัญ เช่น โซนสิ่งกีดขวาง โซนขับรถ สถานีชาร์จ และโต๊ะทำงานบนแผนที่
3. การคำนวณเส้นทางทั่วโลก: ระบบการกำหนดตารางเวลาใช้อัลกอริทึมในการคำนวณเส้นทางที่เหมาะสมที่สุดในเชิงทฤษฎีสำหรับ AGV บนแผนที่
4. การจัดการการจราจร: ระบบจะตรวจสอบว่าเส้นทางนั้นขัดแย้งกับเส้นทางที่วางแผนไว้ของ AGV คันอื่นๆ หรือไม่ หากจำเป็น ระบบจะประสานงาน (เช่น ให้ AGV รอสักครู่ที่จุดเชื่อมต่อ) หรือวางแผนเส้นทางใหม่
5. การกระจายเส้นทาง: เส้นทางที่วางแผนไว้จะถูกกระจายไปยัง AGV
6. การหลีกเลี่ยงสิ่งกีดขวางแบบเรียลไทม์ในพื้นที่: AGV จะเคลื่อนที่ไปตามเส้นทางในขณะที่เซ็นเซอร์จะสแกนสภาพแวดล้อมอย่างต่อเนื่อง เมื่อตรวจพบสิ่งกีดขวาง ระบบจะหลีกเลี่ยงสิ่งกีดขวางหรือเปลี่ยนเส้นทางทันที
7. การดำเนินการงานและการตอบรับ: AGV เข้าถึงจุดเป้าหมาย ทำงานให้เสร็จสมบูรณ์ และส่งข้อมูลสถานะกลับไปยังระบบ
ปัจจัยใดบ้างที่ส่งผลต่อการวางแผนเส้นทาง?
- ความซับซ้อนของสิ่งแวดล้อม: การวางชั้นวางในคลังสินค้า ความกว้างของทางเดิน และตำแหน่งจุดรับรถยก ล้วนส่งผลต่อเส้นทาง
- การกำหนดตารางงาน: เมื่อ AGV หลายตัวทำงานพร้อมกัน จะต้องหลีกเลี่ยงความแออัด
- ความปลอดภัย: ในพื้นที่ที่มนุษย์และเครื่องจักรทำงานร่วมกัน ความปลอดภัยจะต้องได้รับความสำคัญสูงสุดเพื่อให้แน่ใจว่าการปฏิบัติงานมีความปลอดภัยในสภาพแวดล้อมการอยู่ร่วมกันระหว่างมนุษย์และเครื่องจักร
- การเพิ่มประสิทธิภาพ: ลดอัตราการทำงานว่างเปล่าและการใช้พลังงานให้เหลือน้อยที่สุดเพื่อปรับปรุงประสิทธิภาพด้านโลจิสติกส์โดยรวม
กรณีการใช้งาน
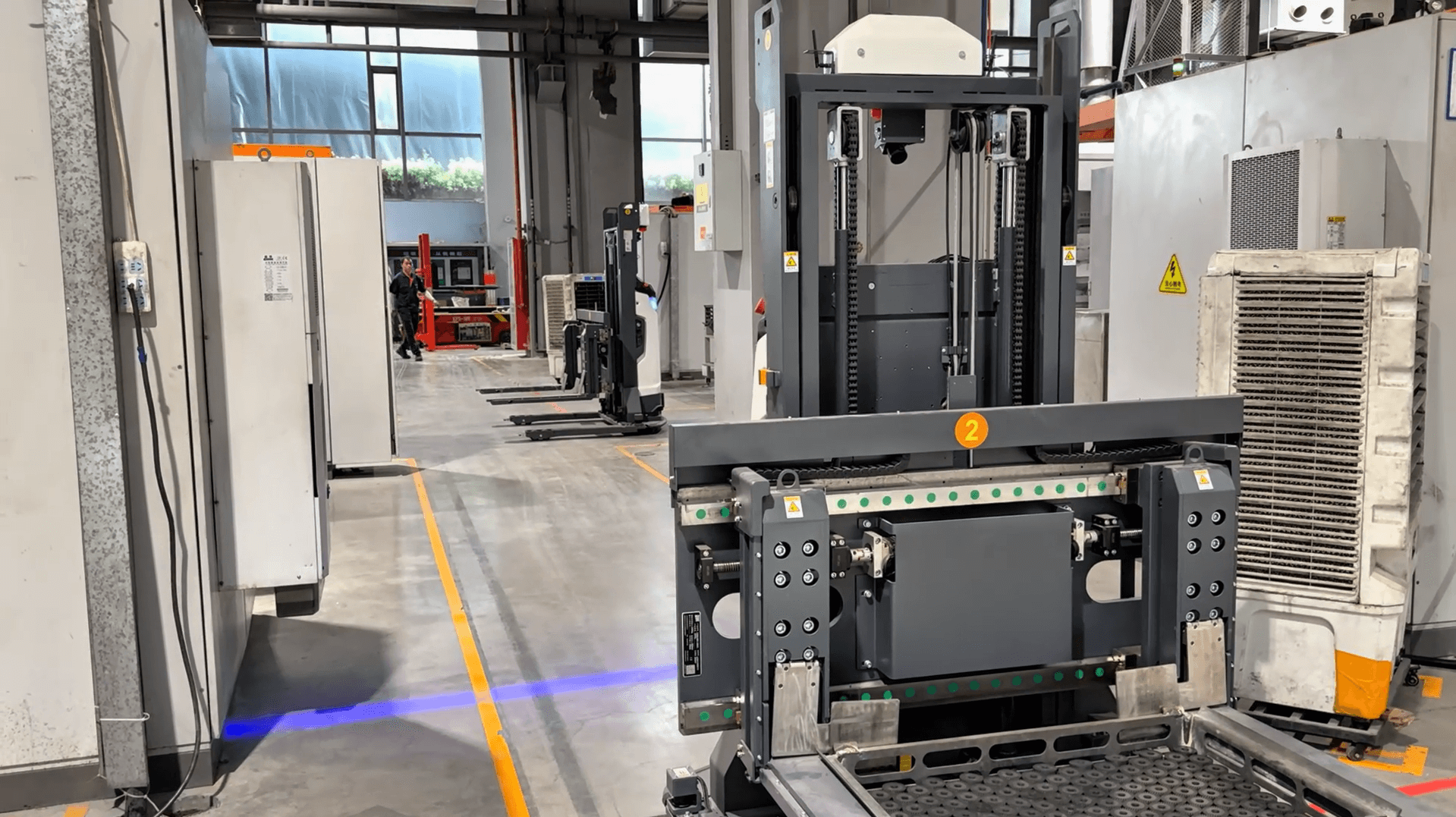
เทคโนโลยีการวางแผนเส้นทางของ AGV มีการใช้งานที่หลากหลาย ยกตัวอย่างเช่น รถยกไร้คนขับของ AiTEN Robotics ใช้ระบบนำทางเลเซอร์ SLAM และอัลกอริทึมอัจฉริยะ AI เพื่อความยืดหยุ่นในการขนส่งในสถานการณ์ต่างๆ เช่น ชิ้นส่วนยานยนต์ และการแปรรูป อาหาร ระบบนี้ไม่เพียงแต่สามารถเลือกเส้นทางที่เหมาะสมที่สุดโดยอัตโนมัติ แต่ยังสามารถทำการหลีกเลี่ยงและปรับเส้นทางให้เหมาะสมอย่างชาญฉลาดเมื่อมีรถหลายคันใช้งานอยู่ ซึ่งช่วยเพิ่มประสิทธิภาพในคลังสินค้าและการผลิตได้อย่างมาก
ในโรงงานผลิต AGV มักใช้ในการขนส่งวัตถุดิบ งานระหว่างทำ และสินค้าสำเร็จรูประหว่างสถานีงานต่างๆ ด้วยการใช้อัลกอริทึมการวางแผนเส้นทางขั้นสูง AGV สามารถนำทางผ่านผังโรงงานที่ซับซ้อน หลีกเลี่ยงอุปสรรคและ AGV อื่นๆ และส่งมอบวัตถุดิบและผลิตภัณฑ์ได้อย่างรวดเร็วและมีประสิทธิภาพ
ในอุตสาหกรรมโลจิสติกส์และคลังสินค้า AGV มีบทบาทสำคัญในการจัดการสินค้าคงคลัง การดำเนินการตามคำสั่งซื้อ และการขนส่ง AGV สามารถตั้งโปรแกรมให้นำทาง หยิบ และขนส่งพาเลทสินค้าภายในคลังสินค้า หรือแม้แต่โหลดและขนถ่ายสินค้าได้ ด้วยการปรับปรุงการวางแผนเส้นทาง AGV สามารถเคลื่อนที่ภายในคลังสินค้าได้อย่างมีประสิทธิภาพ ลดการเดินทางที่ไม่จำเป็น และเพิ่มความเร็วในการประมวลผลคำสั่งซื้อ
บทสรุป
การวางแผนเส้นทางสำหรับ AGV เป็นองค์ประกอบหลักของระบบอัตโนมัติด้านโลจิสติกส์ ตั้งแต่เส้นทางคงที่ไปจนถึงระบบนำทางอัจฉริยะ และตั้งแต่การวางแผนทั่วโลกไปจนถึงการหลีกเลี่ยงสิ่งกีดขวางแบบเรียลไทม์ การเลือกใช้เทคโนโลยีที่แตกต่างกันจะกำหนดสถานการณ์และระดับประสิทธิภาพของระบบ ด้วยการพัฒนาอย่างต่อเนื่องของปัญญาประดิษฐ์และเทคโนโลยีเซ็นเซอร์ การวางแผนเส้นทางของ AGV จะมีความชาญฉลาดมากขึ้น ซึ่งเป็นรากฐานที่แข็งแกร่งสำหรับการยกระดับระบบอัตโนมัติในโรงงานและคลังสินค้า
การเลือกโซลูชันการวางแผนเส้นทางที่เหมาะสมต้องพิจารณาอย่างครอบคลุมถึงข้อกำหนดด้านความยืดหยุ่นของสถานการณ์ทางธุรกิจ ความซับซ้อนของสภาพแวดล้อม และงบประมาณการลงทุน การทำความเข้าใจหลักการพื้นฐานจะช่วยให้องค์กรต่างๆ ออกแบบและนำระบบ AGV ไปใช้ได้ดียิ่งขึ้น ซึ่งจะช่วยปลดล็อกศักยภาพของระบบโลจิสติกส์อัจฉริยะได้อย่างแท้จริง
เกี่ยวกับ AiTEN Robotics
ในฐานะบริษัทที่เชี่ยวชาญด้านโซลูชันโลจิสติกส์อัจฉริยะ AiTEN Robotics ให้ความสำคัญกับสถานการณ์ "โรงงานอัจฉริยะ" อย่างต่อเนื่อง โดยผสานรวมนวัตกรรมเทคโนโลยีเข้ากับความต้องการของอุตสาหกรรมอย่างลึกซึ้ง บริษัทให้บริการที่ครอบคลุมแก่ลูกค้าภาคการผลิตกว่า 200 รายทั่วโลก ด้วยกลุ่มผลิตภัณฑ์หุ่นยนต์ขนถ่ายวัสดุที่หลากหลาย ครอบคลุมสถานการณ์การขนถ่ายวัสดุที่หลากหลาย เราจึงพัฒนาระบบจัดตารางงานอัจฉริยะระดับอุตสาหกรรม เพื่อให้สามารถทำงานร่วมกันระหว่างอุปกรณ์ต่างๆ ได้อย่างมีประสิทธิภาพ ด้วยระบบบริการตลอดวงจรชีวิตที่ครอบคลุม ตั้งแต่การวางแผนก่อนการขาย การนำไปใช้งาน ไปจนถึงการเพิ่มประสิทธิภาพการดำเนินงาน เราช่วยให้องค์กรต่างๆ สามารถบรรลุการเปลี่ยนแปลงด้านข้อมูลอัจฉริยะด้านโลจิสติกส์ ขับเคลื่อนการพัฒนาระบบดิจิทัลและการพัฒนาคุณภาพสูงของอุตสาหกรรมการผลิตอย่างต่อเนื่อง
ติดต่อเรา เพื่อสำรวจโซลูชันระบบอัตโนมัติสำหรับโรงงานของคุณ

