








จากบอร์ด AlphaGo สู่หุ่นยนต์ควบคุมอัจฉริยะ: ปัญญาประดิษฐ์ทำลายขอบเขตระหว่างความจริงและเสมือนได้อย่างไร
_%E7%94%BB%E6%9D%BF%201.avif)

จากกระดานหมากรุกของ AlphaGo ไปจนถึง หุ่นยนต์ควบคุมอัจฉริยะ ปัญญา ประดิษฐ์ (EMBD) ได้กำหนดขอบเขตใหม่ระหว่างความเป็นจริงและโลกเสมือนจริง AiTEN และบริษัทอื่นๆ ได้ยกระดับหุ่นยนต์อุตสาหกรรมจาก 'เครื่องมือปฏิบัติการ' ไปสู่ 'ผู้เรียนรู้' ผ่านการรับรู้หลายรูปแบบ การตัดสินใจแบบไดนามิก และเทคโนโลยีปัญญาประดิษฐ์แบบกลุ่ม ในอนาคต ด้วยการผสานรวม 5G, AI big model และดิจิทัลทวินอย่างลึกซึ้ง ปัญญาประดิษฐ์จะส่งเสริมอุตสาหกรรมการผลิตไปสู่ก้าวกระโดดด้าน 'ความเป็นอิสระ ความยืดหยุ่น และคาร์บอนต่ำ' ซึ่งเป็นการเปิดศักราชใหม่ของอุตสาหกรรม 4.0
Ⅰ. วิวัฒนาการของสติปัญญาที่เป็นรูปธรรม
--การก้าวกระโดดทางความคิดจากสัญลักษณ์สู่สิ่งที่เป็นรูปธรรม
01 รากฐานของหุ่นยนต์และความขัดแย้งของสัญลักษณ์
ในปี 1950 อลัน ทัวริง ซึ่งได้รับการยกย่องอย่างกว้างขวางว่าเป็นบิดาแห่งปัญญาประดิษฐ์ ได้เสนอแนวคิดเรื่องปัญญาประดิษฐ์แบบฝังตัว (embodied intelligence) ในบทความสำคัญของเขา เรื่อง Computing Machinery and Intelligence หุ่นยนต์เคลื่อนที่ตัวแรกที่นำแนวคิด AI มาใช้คือ “Shakey” ซึ่งได้รับการพัฒนาระหว่างปี 1956 ถึง 1972 ที่สถาบันวิจัยสแตนฟอร์ด (ปัจจุบันคือ SRI International) ภายใต้การนำของชาร์ลส์ โรเซน Shakey ถูกควบคุมจากระยะไกลด้วยคอมพิวเตอร์สองเครื่องผ่านระบบไร้สาย ด้วยพลังการประมวลผลที่ช้า ทำให้ต้องใช้เวลาหลายชั่วโมงในการตรวจจับสภาพแวดล้อมและวางแผนการเคลื่อนที่
ระบบหุ่นยนต์ในยุคแรกทำงานภายใต้กรอบเชิงสัญลักษณ์ โดยทำงานง่ายๆ ตามกฎเกณฑ์ที่กำหนดไว้ล่วงหน้า สถาปัตยกรรมแบบลำดับขั้นตอน “สัมผัส-วางแผน-ลงมือทำ” นี้พิสูจน์แล้วว่าไม่ยืดหยุ่นในสภาพแวดล้อมจริงที่มีการเปลี่ยนแปลงตลอดเวลา ข้อจำกัดของปัญญาประดิษฐ์เชิงสัญลักษณ์จึงชัดเจนขึ้น นั่นคือ ขาดความสามารถในการปรับตัวเข้ากับการเปลี่ยนแปลงภายนอกอย่างแท้จริง
ด้วยเหตุนี้ นักวิชาการจึงเริ่มไตร่ตรองถึงข้อจำกัดของปัญญาประดิษฐ์เชิงสัญลักษณ์แบบดั้งเดิม พวกเขาค่อยๆ ตระหนักว่าสติปัญญาเชื่อมโยงอย่างใกล้ชิดกับร่างกายและสภาพแวดล้อม และไม่สามารถพึ่งพาการดำเนินการเชิงสัญลักษณ์เชิงนามธรรมเพียงอย่างเดียวได้
2. ความก้าวหน้าทางพฤติกรรมและการตื่นรู้ที่เป็นรูปธรรม
ในปี พ.ศ. 2529 ร็อดนีย์ บรูคส์ ผู้บุกเบิกหุ่นยนต์เชิงพฤติกรรมนิยม ได้ชี้ให้เห็นจากมุมมองไซเบอร์เนติกส์ว่าปัญญาประดิษฐ์เชิงสัญลักษณ์แบบดั้งเดิมนั้นพึ่งพาระบบการใช้เหตุผลที่ซับซ้อนมากเกินไป และมองข้ามบทบาทสำคัญของปฏิสัมพันธ์ระหว่างร่างกายและสิ่งแวดล้อมในพฤติกรรมอัจฉริยะ เขาเสนอแนวคิดหุ่นยนต์เชิงพฤติกรรม ซึ่งเน้นการกำจัดการนำเสนอ และส่งเสริมการพัฒนาสติปัญญาแบบมีร่างกาย (embodied intelligence) โดยมีพฤติกรรมเป็นแกนหลัก โดยให้เหตุผลว่าสติปัญญาเป็นแบบมีร่างกาย (embodied intelligence) และเป็นแบบมีบริบท (contextualized intelligence) ทฤษฎีนี้วางรากฐานสำหรับสติปัญญาแบบมีร่างกาย และเริ่มมีอิทธิพลต่อสาขาหุ่นยนต์ในขณะนั้น
ในปี 1991 บรูคส์ได้เสนอแนวคิดปัญญาประดิษฐ์เชิงพฤติกรรม (Behaviour-Based AI) ซึ่งระบุว่าระบบอัจฉริยะควรมีความสามารถในการปรับตัวสูงโดยการโต้ตอบโดยตรงกับสภาพแวดล้อม แทนที่จะพึ่งพาแบบจำลองภายใน งานวิจัยที่ก้าวล้ำนี้ได้กลายเป็นก้าวสำคัญของปัญญาประดิษฐ์แบบฝังตัว (embodied intelligence) ซึ่งนำไปสู่การเปลี่ยนจากพลังการประมวลผลไปสู่ปฏิสัมพันธ์ระหว่างร่างกายกับสภาพแวดล้อม และผลักดันนวัตกรรมด้านหุ่นยนต์ในแง่ของความสามารถในการปรับตัวและการโต้ตอบกับสภาพแวดล้อม
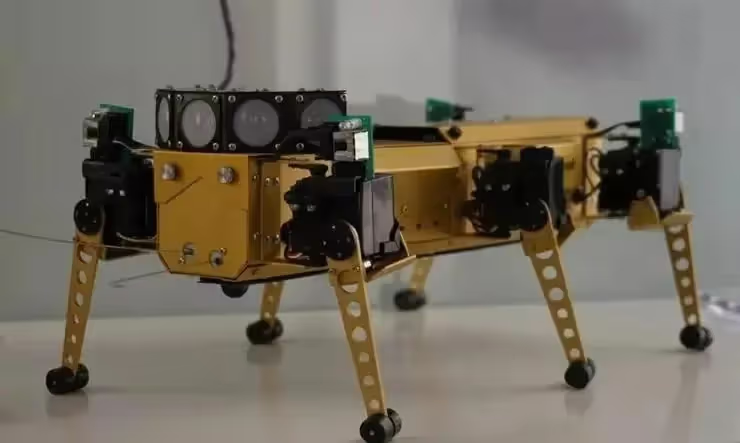
ในช่วงทศวรรษ 1990 สถาบันเทคโนโลยีแมสซาชูเซตส์ (MIT) ในสหรัฐอเมริกาประสบความสำเร็จในการพัฒนาหุ่นยนต์ไบโอนิกหกขาชื่อเจงกิส (Genghis) ซึ่งสามารถอาศัยข้อมูลป้อนกลับจากเซ็นเซอร์เพื่อให้สามารถปรับการเดินได้เอง และถือเป็นหุ่นยนต์ปัญญาประดิษฐ์ตัวแรกของโลกที่มีความสามารถในการรับรู้ของเครื่องจักร การให้เหตุผล การเรียนรู้เสริม และพฤติกรรมอัตโนมัติ ความสำเร็จนี้ถือเป็นก้าวสำคัญในสาขาหุ่นยนต์ปัญญาประดิษฐ์ (AI)
3. อุตสาหกรรม 4.0 และจุดเปลี่ยนของการบรรจบกันของความเป็นจริงเสมือน
ในช่วงต้นศตวรรษที่ 21 งานวิจัยเกี่ยวกับปัญญาประดิษฐ์ (embodied intelligence) ค่อยๆ พัฒนาและขยายขอบเขตไปสู่ปัญญาประดิษฐ์ของมนุษย์ นักวิจัยได้นำเสนอแบบจำลองการรู้คิดแบบ embodied cognition ซึ่งอาศัยปฏิสัมพันธ์ระหว่างการรับรู้ การกระทำ และสภาพแวดล้อม เพื่อทำความเข้าใจกระบวนการทางปัญญาของมนุษย์ได้ดียิ่งขึ้น ขณะเดียวกัน ความก้าวหน้าทางเทคโนโลยีในด้านหุ่นยนต์ฮิวแมนนอยด์และหุ่นยนต์ไบโอนิกส์ ได้พัฒนาการประยุกต์ใช้ปัญญาประดิษฐ์ไปอีกขั้น ทำให้หุ่นยนต์สามารถรับมือกับความท้าทายในสภาพแวดล้อมทางกายภาพที่ซับซ้อนได้อย่างสมจริงยิ่งขึ้น
ในช่วงทศวรรษ 2010 ด้วยการพัฒนาอย่างรวดเร็วของเทคโนโลยีการเรียนรู้เชิงลึกและการเรียนรู้ของเครื่องจักร ปัญญาประดิษฐ์ (EMBOD) ได้ก้าวเข้าสู่ยุคใหม่ นักวิจัยได้ผสมผสานเทคโนโลยีการเรียนรู้เชิงลึกเข้ากับปัญญาประดิษฐ์ (EMBOD) เพื่อให้หุ่นยนต์สามารถสำรวจตนเองและปรับตัวตามพฤติกรรมได้ผ่านการเรียนรู้แบบเสริมแรงเชิงลึก ซึ่งทำให้หุ่นยนต์สามารถเรียนรู้ด้วยตนเองในสภาพแวดล้อมที่ไม่เคยรู้จักมาก่อน ในปี 2011 กลยุทธ์อุตสาหกรรม 4.0 ของเยอรมนีได้นำเสนอ 'ระบบสารสนเทศทางกายภาพ' (CPS) ซึ่งกำหนดให้เอนทิตีทางกายภาพและแบบจำลองดิจิทัลต้องมีความลึกซึ้ง ในปี 2011 กลยุทธ์อุตสาหกรรม 4.0 ของเยอรมนีได้นำเสนอ 'ระบบสารสนเทศทางกายภาพ' (CPS) ซึ่งกำหนดให้เอนทิตีทางกายภาพและแบบจำลองดิจิทัลต้องมีความลึกซึ้ง และการเปลี่ยนหุ่นยนต์อุตสาหกรรม เช่น แขนหุ่นยนต์ ให้กลายเป็นปัญญาประดิษฐ์ (EMBOD) เพื่อปรับตัวให้เข้ากับความต้องการด้านการผลิตทางอุตสาหกรรมที่ซับซ้อนและเปลี่ยนแปลงไป
4. การระเบิดของปัญญาประดิษฐ์: จาก AlphaGo สู่สิ่งที่เป็นรูปธรรม
ในช่วงทศวรรษ 2020 ปัญญาประดิษฐ์ (embodied intelligence) ได้กลายเป็นทิศทางการวิจัยที่สำคัญในด้านปัญญาประดิษฐ์ (AI) และหุ่นยนต์ ชัยชนะของ AlphaGo เหนือ Lee Sedol ในปี 2016 ถือเป็นความก้าวหน้าครั้งสำคัญในการเรียนรู้เชิงลึกในการตัดสินใจเชิงนามธรรม อย่างไรก็ตาม Go อยู่ใน "สภาพแวดล้อมแบบปิด" ในขณะที่ปัญญาประดิษฐ์จำเป็นต้องจัดการกับปฏิสัมพันธ์ทางกายภาพในสภาพแวดล้อมแบบเปิด
ในเดือนมีนาคม พ.ศ. 2567 OpenAI ได้ร่วมมือกับ Figure Inc. เพื่อเปิดตัวหุ่นยนต์ฮิวแมนนอยด์ Figure 01 ซึ่งแสดงให้เห็นถึงความก้าวหน้าอันล้ำสมัยในด้านความเข้าใจ การตัดสินใจ และการประเมินตนเองในด้านปัญญาประดิษฐ์ (embodied intelligence) ในเดือนตุลาคมของปีเดียวกัน หุ่นยนต์สมองน้อยแบบ embodied ได้รับการยกย่องให้เป็นหนึ่งใน 10 เทรนด์เทคโนโลยีล้ำสมัยด้าน AI ซึ่งบ่งชี้ว่าปัญญาประดิษฐ์กำลังผสานรวมระบบการรับรู้แบบหลายโหมด การออกแบบแบบไบโอนิก และเทคโนโลยีแบบจำลองขนาดใหญ่เข้าด้วยกัน เพื่อเสริมศักยภาพในการปรับตัวและการตัดสินใจของหุ่นยนต์ให้ใกล้เคียงกับมนุษย์มากขึ้น และเพื่อขับเคลื่อนความร่วมมือระหว่างมนุษย์และหุ่นยนต์สู่อนาคตใหม่
II. ความก้าวหน้าทางเทคโนโลยีของรถยกไร้คนขับ
การหลีกเลี่ยงอุปสรรคแบบไดนามิกและการทำงานร่วมกันของเครื่องจักรหลายเครื่องในการปฏิบัติจริง
1. บทนำ
สาขาปัญญาประดิษฐ์มีศักยภาพทางการตลาดและโอกาสในการพัฒนาอย่างมหาศาล ด้วยเทคโนโลยีที่พัฒนาอย่างต่อเนื่องและการประยุกต์ใช้งานที่ขยายตัว ผลิตภัณฑ์ปัญญาประดิษฐ์จะมีบทบาทสำคัญในหลายสาขา เช่น การผลิตอัจฉริยะ บ้านอัจฉริยะ การดูแลสุขภาพอัจฉริยะ และบริการอัจฉริยะ
โรงงานและโรงงานอุตสาหกรรมเป็นหนึ่งในสถานการณ์การใช้งานหุ่นยนต์ที่เริ่มมีการพัฒนาและเติบโตเร็วที่สุด หุ่นยนต์อุตสาหกรรมแบบดั้งเดิม (แขนกล) ถูกนำมาใช้อย่างแพร่หลายในอุตสาหกรรมการผลิตยานยนต์ การประกอบชิ้นส่วนอิเล็กทรอนิกส์ และสาขาอื่นๆ แต่ส่วนใหญ่เป็นอุปกรณ์เฉพาะทางแบบติดตั้งอยู่กับที่ และด้วยการเพิ่มระบบอัจฉริยะของร่างกาย คาดว่าจะสามารถทำงานการผลิตที่ยืดหยุ่นและเปลี่ยนแปลงได้มากขึ้น ในฐานะ "โรงงานสำหรับคนงานทั่วไป" คลังสินค้าและศูนย์โลจิสติกส์เป็นหนึ่งในสมรภูมิที่ล้ำสมัยที่สุดสำหรับการนำระบบอัจฉริยะแบบฝังตัวมาใช้ในเชิงพาณิชย์ ความเฟื่องฟูของอีคอมเมิร์ซส่งผลให้ความต้องการระบบอัตโนมัติในการจัดเก็บและคัดแยกสินค้าเพิ่มขึ้นอย่างมาก สายพานลำเลียงแบบติดตั้งอยู่กับที่และรถขนส่งอัตโนมัติ (AGV) แบบดั้งเดิมไม่สามารถตอบสนองความต้องการด้านความยืดหยุ่นได้อีกต่อไป ทำให้เกิดหุ่นยนต์อเนกประสงค์บางรุ่นที่เคลื่อนที่ได้อย่างอิสระภายในคลังสินค้าและปฏิบัติงานด้านการจัดการ
ในฐานะผู้บุกเบิกด้านปัญญาประดิษฐ์ (embodied intelligence) AiTEN ได้นำเทคโนโลยีการตัดสินใจเชิงปัญญาที่พัฒนาขึ้นเองมาใช้เป็นแกนหลักในการก้าวข้ามปัญหาการรับรู้อัตโนมัติและการตัดสินใจแบบไดนามิกของหุ่นยนต์อัจฉริยะ รถยก MP10 , APe15 และรถยกไร้คนขับรุ่นอื่นๆ ของบริษัทถูกนำไปใช้อย่างแพร่หลายในอุตสาหกรรมการผลิตอัจฉริยะ โลจิสติกส์อัจฉริยะ และอุตสาหกรรมอื่นๆ บริษัทให้ความสำคัญกับระบบขับเคลื่อนล้อคู่แบบ 'เทคโนโลยี + สถานการณ์' ผ่านโมเดล AI และการผสมผสานความลึกของหุ่นยนต์ เพื่อสร้างระบบนิเวศน์แบบครบวงจร ตั้งแต่การพัฒนาอัลกอริทึมไปจนถึงการลงจอดในอุตสาหกรรม
2. การหลีกเลี่ยงอุปสรรคแบบไดนามิก: จากการตอบสนองแบบเฉยๆ ไปสู่การรับรู้แบบกระตือรือร้น
รถยกไร้คนขับจำเป็นต้องรับรู้สภาพแวดล้อมระหว่างการทำงาน หุ่นยนต์ขนย้ายของ AiTEN ใช้เทคโนโลยีฟิวชั่นเซ็นเซอร์แบบหลายโหมดที่มีความหลากหลาย ซึ่งสามารถรับรู้ข้อมูลสภาพแวดล้อมและอนุมานข้อมูลสภาพแวดล้อมผ่านการคำนวณแบบจำลอง ซึ่งช่วยเพิ่มความสามารถในการปรับตัวให้เข้ากับสภาพแวดล้อมที่เปลี่ยนแปลงตลอดเวลาและไม่มีโครงสร้างได้อย่างมาก
เซ็นเซอร์ปลายส้อมได้รับการประสานงานกับเซ็นเซอร์สินค้าในสถานที่เพื่อให้สามารถควบคุมความแม่นยำได้ภายใน ±10 มม.
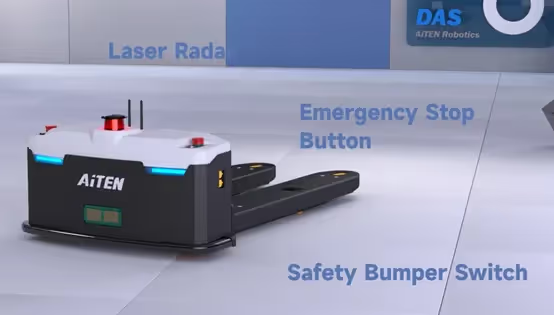
นอกจากนี้ หุ่นยนต์ของ AiTEN ยังรองรับการหยุดอย่างปลอดภัยแบบ 360° ในระนาบ และการหลีกเลี่ยงสิ่งกีดขวางสามมิติไปข้างหน้า และยังรองรับการจดจำการตรวจจับสิ่งกีดขวางที่ต่ำหรือยื่นออกมาด้วย โดยมีการตรวจจับการชนที่ปลายส้อม สวิตช์หยุดฉุกเฉิน และแถบป้องกันการชนที่หุ้มไว้ ซึ่งสอดคล้องกับการรับรอง CE
3. การทำงานร่วมกันของเครื่องจักรหลายเครื่อง: จากระบบอัตโนมัติของเครื่องจักรเพียงเครื่องเดียวไปจนถึงระบบอัจฉริยะแบบกลุ่ม
ระบบควบคุมส่วนกลางที่รองรับด้วยฐานข้อมูลขนาดใหญ่ ช่วยให้สามารถวิเคราะห์ข้อมูลและควบคุมหุ่นยนต์ขนย้ายจากระยะไกล ได้ แพลตฟอร์มซอฟต์แวร์ของ AiTEN ซึ่งรองรับการคำนวณด้วยปัญญาประดิษฐ์ ช่วยให้สามารถกำหนดและกำหนดเวลางานโดยอัตโนมัติ ปรับปรุงการจัดการโลจิสติกส์ภายในอย่างครอบคลุม รองรับความเข้ากันได้กับอุปกรณ์และระบบที่หลากหลาย และผสานรวมกับโครงสร้างพื้นฐานที่มีอยู่ได้อย่างง่ายดายและราบรื่น อีกทั้งยังรองรับการวางแผนเส้นทางแบบเรียลไทม์และการทำงานร่วมกันของหุ่นยนต์หลายตัว เพื่อหลีกเลี่ยงความแออัดและความขัดแย้ง ปรับปรุงประสิทธิภาพการทำงาน และเพิ่มประสิทธิภาพขั้นตอนการทำงาน ขณะเดียวกัน ยังรองรับการวางแผนเส้นทางแบบเรียลไทม์และการทำงานร่วมกันของหุ่นยนต์หลายตัว เพื่อหลีกเลี่ยงความแออัดและความขัดแย้ง ปรับปรุงประสิทธิภาพการทำงาน และเพิ่มประสิทธิภาพขั้นตอนการทำงาน
ลูกค้าอุตสาหกรรมอิเล็กทรอนิกส์ 3c ได้ปรับปรุงระบบโลจิสติกส์ภายใน ลดต้นทุนโลจิสติกส์ ปรับปรุงการทำงานร่วมกันของการผลิต ปรับปรุงเวลาตอบสนองโดยรวมของผลิตภัณฑ์เพื่อลดระยะเวลาในการผลิตให้สั้นลง เพื่อปกป้องคุณภาพสูงของผลิตภัณฑ์ ความต้องการการผลิตขนาดใหญ่
บทสรุป
จากกระดานหมากรุกของ AlphaGo ไปจนถึงหุ่นยนต์ควบคุมอัจฉริยะ ปัญญาประดิษฐ์กำลังสร้างเส้นแบ่งระหว่างความเป็นจริงและโลกเสมือนจริงขึ้นใหม่ AiTEN และบริษัทอื่นๆ ได้ยกระดับหุ่นยนต์อุตสาหกรรมจาก 'เครื่องมือปฏิบัติการ' ไปสู่ 'ผู้เรียนรู้' ผ่านการรับรู้หลายรูปแบบ การตัดสินใจแบบไดนามิก และเทคโนโลยีปัญญาประดิษฐ์แบบกลุ่ม ในอนาคต ด้วยการผสานรวม 5G, แบบจำลองขนาดใหญ่ของ AI และฝาแฝดดิจิทัลอย่างลึกซึ้ง ปัญญาประดิษฐ์จะส่งเสริมอุตสาหกรรมการผลิตไปสู่ก้าวกระโดดด้าน 'ความเป็นอิสระ ความยืดหยุ่น และคาร์บอนต่ำ' ซึ่งเป็นการเปิดศักราชใหม่ของอุตสาหกรรม 4.0
ในฐานะองค์กรด้านโซลูชันโลจิสติกส์อัจฉริยะ AiTEN Robotics ให้ความสำคัญกับสถานการณ์ “โรงงานอัจฉริยะ” อยู่เสมอ ผสานรวมนวัตกรรมเทคโนโลยีและความต้องการของอุตสาหกรรมอย่างลึกซึ้ง และมอบบริการที่ครอบคลุมให้กับลูกค้าภาคการผลิตกว่า 200 รายทั่วโลก ด้วยผลิตภัณฑ์หุ่นยนต์ขนย้ายที่ครอบคลุมหลากหลายรูปแบบ ระบบจัดตารางการทำงานอัจฉริยะระดับอุตสาหกรรมที่พัฒนาขึ้นเอง เพื่อให้เกิดการทำงานร่วมกันของอุปกรณ์หลายชิ้นได้อย่างมีประสิทธิภาพ และระบบจัดตารางการทำงานอัจฉริยะระดับอุตสาหกรรมที่พัฒนาขึ้นเอง เพื่อให้เกิดการทำงานร่วมกันของอุปกรณ์หลายชิ้นได้อย่างมีประสิทธิภาพ เรามอบบริการที่ครอบคลุมให้กับลูกค้าภาคการผลิตกว่า 200 รายทั่วโลก ด้วยผลิตภัณฑ์หุ่นยนต์ขนย้ายที่ครอบคลุมหลากหลายรูปแบบ ระบบจัดตารางการทำงานอัจฉริยะระดับอุตสาหกรรมที่พัฒนาขึ้นเอง เพื่อให้เกิดการทำงานร่วมกันของอุปกรณ์หลายชิ้นได้อย่างมีประสิทธิภาพ และระบบบริการครบวงจรที่ครอบคลุมตั้งแต่การวางแผนก่อนการขาย การนำไปใช้งาน และการนำไปใช้งาน ไปจนถึงการเพิ่มประสิทธิภาพการดำเนินงานและการบำรุงรักษา เราได้ช่วยเหลือองค์กรต่างๆ ในการบรรลุการเปลี่ยนแปลงสู่ระบบโลจิสติกส์อย่างชาญฉลาด และยังคงส่งเสริมอุตสาหกรรมการผลิตในการยกระดับและพัฒนาคุณภาพสู่ระบบดิจิทัลอย่างต่อเนื่อง

