








การวิเคราะห์เทคโนโลยีการวางแผนเส้นทางหยิบและวางพาเลทของ AGV
_%E7%94%BB%E6%9D%BF%201.avif)
.avif)
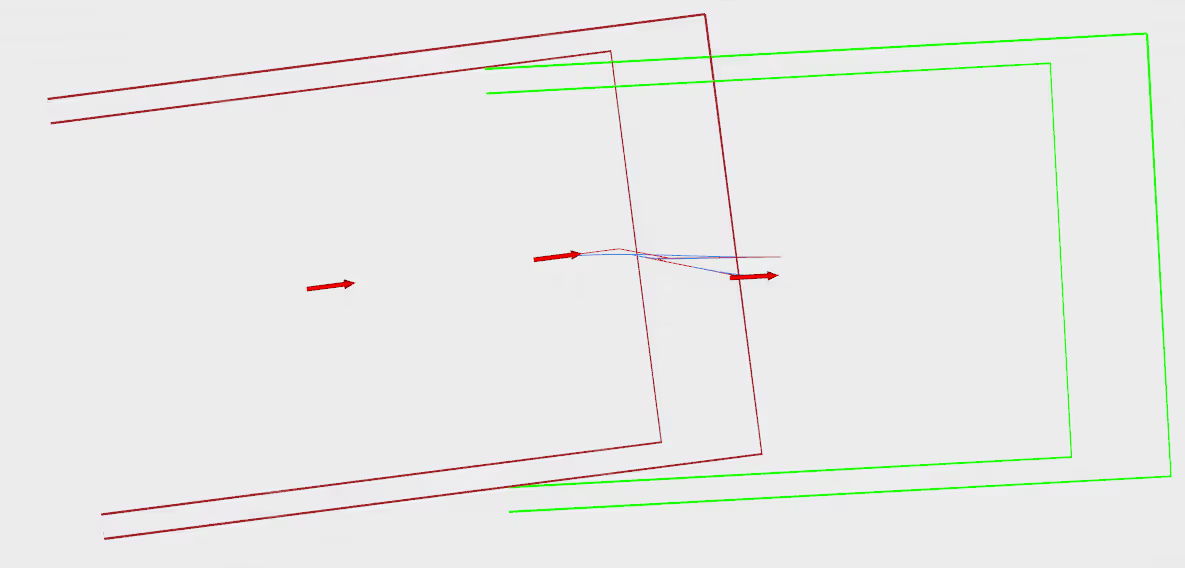
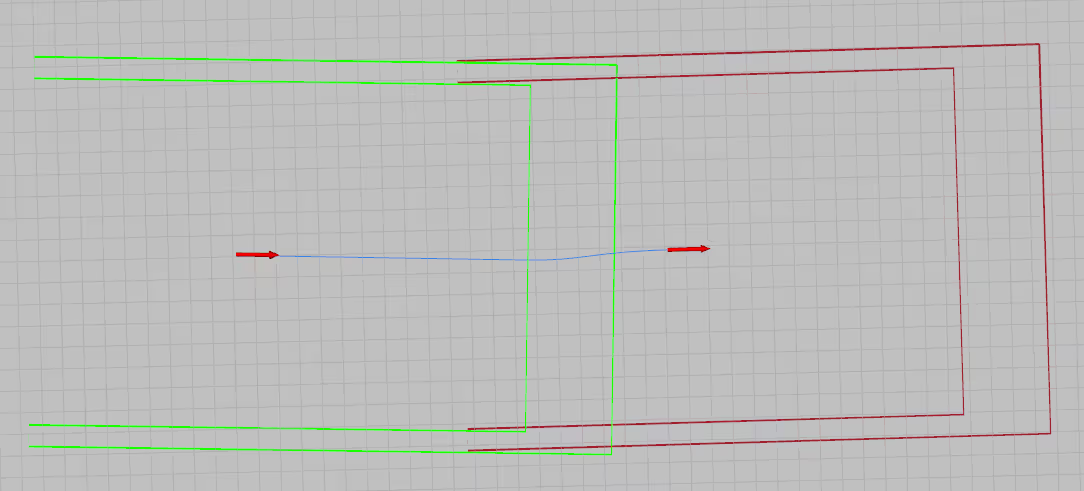
การหยิบและวางพาเลทอย่างแม่นยำของ AGV อาศัยเทคโนโลยีการวางแผนเส้นทางขั้นสูง งานนี้ไม่เพียงแต่ต้องการเส้นทางที่ปราศจากการชนกันเท่านั้น แต่ยังต้องการท่าทางที่แม่นยำและวิถีการเคลื่อนที่ที่ราบรื่นเมื่อเข้าใกล้พาเลท บทความนี้วิเคราะห์เทคโนโลยีหลักเพื่อให้บรรลุเป้าหมายนี้ เช่น การประยุกต์ใช้เส้นโค้ง Hybrid A และ Bézier ร่วมกัน
เหตุใดการจัดการพาเลทจึงต้องมีการวางแผนเส้นทางพิเศษ?
ความท้าทาย:
- ความแม่นยำสูงในตอนท้าย: ส้อมจะต้องจัดตำแหน่งให้ตรงกับรูส้อมของพาเลทด้วยความแม่นยำระดับเซนติเมตร/มิลลิเมตร และต้องเป็นไปตามข้อกำหนดด้านการวางแนวที่จอดรถที่เข้มงวด
- ข้อจำกัดการเคลื่อนไหวที่เข้มงวด: ต้องปฏิบัติตามขนาดของ AGV อย่างเคร่งครัด รัศมีการเลี้ยวขั้นต่ำ และข้อจำกัดที่ไม่สมบูรณ์ (ไม่มีการเคลื่อนไหวด้านข้าง) โดยเฉพาะอย่างยิ่งในพื้นที่แคบ
- ความราบรื่นของเส้นทาง: หลีกเลี่ยงการเร่งความเร็ว ลดความเร็ว หรือการเลี้ยวกะทันหันเพื่อให้แน่ใจว่าสินค้ามีเสถียรภาพและปลอดภัยในการปฏิบัติงาน
- การหลีกเลี่ยงอุปสรรคอย่างแม่นยำใกล้สิ้นสุด: จำเป็นต้องมีการตรวจจับที่แม่นยำสูงเมื่อเข้าใกล้พาเลทเพื่อแก้ไขอุปสรรคที่ไม่รู้จักหรือข้อผิดพลาดในการวางตำแหน่ง
การวิเคราะห์ทางเทคนิค
1. การวางแผนเส้นทางทั่วโลก
เทคโนโลยี: Dijkstra, มาตรฐาน A*
ฟังก์ชัน: สร้างเส้นทางทั่วไปอย่างรวดเร็ว (เชื่อมต่อ ต้นทุนต่ำ) จากจุดเริ่มต้นไปยังพื้นที่ถาดบนแผนที่กริดโลก
คุณสมบัติ: ความเร็วสูง ไม่สนใจรายละเอียดการเคลื่อนไหว
2. การวางแผนเส้นทางละเอียดปลายทาง
เทคโนโลยีหลัก: ไฮบริด A**
ข้อดี: ค้นหาในสถานะต่อเนื่อง (x, y, θ) และฝังโมเดลจลนศาสตร์ของยานพาหนะโดยตรง (เช่น โมเดลจักรยาน)
ผลลัพธ์: สร้างเส้นทางที่เป็นไปได้ที่ไปถึงตำแหน่งเป้าหมายที่แน่นอน (x, y, θ) และปฏิบัติตามข้อจำกัด เช่น รัศมีการเลี้ยว แก้ไขปัญหาการเลี้ยวที่ซับซ้อนใน 'เมตรสุดท้าย'
3. การปรับเส้นทางให้เรียบและเพิ่มประสิทธิภาพ
เทคโนโลยีหลัก: เส้นโค้งเบซิเยร์
ข้อดี: สร้างเส้นโค้งที่ราบรื่นและต่อเนื่องผ่านจุดควบคุม ช่วยให้มั่นใจได้ว่าตำแหน่งเริ่มต้น/สิ้นสุดและทิศทาง (แทนเจนต์) สามารถควบคุมได้
การใช้งาน: ปรับเส้นทางที่สร้างโดยการค้นหาให้เรียบเนียน (โดยมักมีมุม) เพื่อให้แน่ใจว่ามีความโค้งต่อเนื่อง เชื่อมต่อส่วนต่างๆ ของเส้นทาง สร้างเส้นทางความเร็วต่อเนื่อง
เทคโนโลยีทางเลือก: B-splines, NURBS
4. การหลีกเลี่ยงสิ่งกีดขวางและการปรับเส้นทางแบบเรียลไทม์
เทคโนโลยี: อัลกอริทึมหน้าต่างแบบไดนามิก (DWA), แถบยืดหยุ่นเวลา (TEB), การวางแผนใหม่อย่างรวดเร็ว
ฟังก์ชัน: อิงตามข้อมูลเซ็นเซอร์ ปรับเส้นทาง/ความเร็วในพื้นที่เพื่อหลีกเลี่ยงสิ่งกีดขวางแบบไดนามิกในขณะที่ยังคงอยู่ใกล้กับเส้นทางเดิมที่ได้รับการเพิ่มประสิทธิภาพให้มากที่สุด
การบรรจบกันของเทคโนโลยี
กระบวนการวางแผนเส้นทางการหยิบและวางพาเลท AGV อาจเป็นดังต่อไปนี้
1. การวางแผนทั่วโลก (A*): วางแผนเส้นทางคร่าวๆ จากจุดเริ่มต้นไปยังบริเวณใกล้เคียงพื้นที่พาเลทบนแผนที่กริด
2. สวิตช์การวางแผนเทอร์มินัล: กระตุ้นการวางแผนโดยละเอียดเมื่อ AGV เข้าใกล้พื้นที่พาเลท
3. การเชื่อมต่อที่แม่นยำ (ไฮบริด A*): วางแผนเส้นทางที่สอดคล้องกับจลนศาสตร์ไปยังท่าเป้าหมาย (x, y, θ)
4. การปรับเส้นทางให้เรียบ (เบซิเยร์/สไปน์): ปรับเส้นทางที่เย็บให้เรียบเพื่อสร้างเส้นทางสุดท้ายที่มีความต่อเนื่องทางเรขาคณิต
5. การสร้างวิถี: สร้างวิถีที่มีข้อจำกัดด้านความเร็ว/ความเร่งโดยอิงจากเส้นทางที่ปรับให้เรียบเพื่อให้ตัวควบคุมดำเนินการ
6. หลีกเลี่ยงสิ่งกีดขวางแบบเรียลไทม์: ตรวจสอบกระบวนการทั้งหมดและปรับเส้นทาง/ความเร็วแบบไดนามิกเพื่อหลีกเลี่ยงสิ่งกีดขวาง
ความท้าทาย
แม้ว่าเทคโนโลยีที่มีอยู่จะสามารถแก้ไขปัญหาการหยิบและวางพาเลท AGV ได้ในระดับหนึ่งแล้ว แต่ยังคงมีความท้าทายและโอกาสในการพัฒนาอย่างต่อเนื่อง:
- การสร้างสมดุลระหว่างประสิทธิภาพและความแม่นยำ: การวางแผนที่ละเอียดมากขึ้นมักหมายถึงต้นทุนการประมวลผลที่สูงขึ้น การปรับปรุงความเร็วในการวางแผนควบคู่ไปกับการรับประกันความแม่นยำเป็นสิ่งสำคัญสำหรับการปรับปรุงประสิทธิภาพอย่างต่อเนื่อง
- ความสามารถในการปรับตัวให้เข้ากับสภาพแวดล้อมแบบไดนามิก: วิธีการจัดการกับอุปสรรคที่เคลื่อนไหว การเปลี่ยนตำแหน่งพาเลทหรือท่าทางให้แข็งแกร่งยิ่งขึ้น
- ความแม่นยำของการรวมเซ็นเซอร์และการวางตำแหน่ง: การดำเนินการตามเส้นทางที่มีความแม่นยำสูงต้องอาศัยการวางตำแหน่งแบบเรียลไทม์และการรับรู้สภาพแวดล้อมที่มีความแม่นยำสูง
- การทำงานร่วมกันของ AGV หลายคัน: ในพื้นที่หยิบและวางที่มีประชากรหนาแน่น วิธีการประสานงาน AGV หลายคันเพื่อการปฏิบัติงานอย่างมีประสิทธิภาพและปลอดภัย
- วิธีการตามการเรียนรู้: การสำรวจการใช้การเรียนรู้แบบเสริมแรงและวิธีการอื่นๆ เพื่อให้ AGV สามารถเรียนรู้กลยุทธ์และเส้นทางการเลือกและวางที่เหมาะสมที่สุดโดยอัตโนมัติ
บทสรุป
การหยิบและวางพาเลทอย่างแม่นยำด้วย AGV เป็นงานที่ซับซ้อนและแม่นยำในระบบอัตโนมัติ งานนี้ไม่ขึ้นอยู่กับเทคโนโลยี "สุดยอด" เพียงเทคโนโลยีเดียว แต่ขึ้นอยู่กับการผสมผสานและการประสานงานอย่างชาญฉลาดของเทคโนโลยีการวางแผนและเพิ่มประสิทธิภาพหลายเส้นทาง
ตั้งแต่ระบบนำทางทั่วโลกไปจนถึงการวางแผนจุดสิ้นสุดโดยอาศัยการรับรู้จลนศาสตร์ที่ขับเคลื่อนด้วย Hybrid A* ไปจนถึงวิถีการเคลื่อนที่ที่ราบรื่นด้วยเทคนิคต่างๆ เช่น เส้นโค้งเบซิเยร์ เทคโนโลยีเหล่านี้ร่วมกันสร้าง “เส้นทางอัจฉริยะ” ให้ AGV ทำงานได้อย่างปลอดภัย แม่นยำ และมีประสิทธิภาพ ก่อให้เกิดแรงผลักดันอันทรงพลังให้กับระบบโลจิสติกส์และการผลิตอัตโนมัติสมัยใหม่ ในขณะที่เทคโนโลยียังคงก้าวหน้า เรามีเหตุผลทุกประการที่จะเชื่อว่า AGV ในอนาคตจะแสดงให้เห็นถึงความชาญฉลาดและความยืดหยุ่นที่มากขึ้นในการดำเนินการจัดการพาเลท
AiTEN Robotics มีสำนักงานใหญ่อยู่ที่เมืองซูโจว ประเทศจีน เป็นผู้นำระดับโลกด้านยานยนต์อุตสาหกรรมไร้คนขับ (AMR/AGV) และโซลูชันระบบอัตโนมัติด้านโลจิสติกส์ AiTEN Robotics ได้พัฒนาผลิตภัณฑ์สิบซีรีส์เพื่อตอบสนองความต้องการด้านการจัดการวัสดุแบบครบวงจร AiTEN Robotics ได้ดำเนินโครงการมากกว่า 200 โครงการในกว่า 30 ประเทศและภูมิภาค และได้รับความไว้วางใจจากบริษัท Fortune 500 มากมายในอุตสาหกรรมต่างๆ เช่น ยานยนต์ อาหารและเครื่องดื่ม เคมีภัณฑ์ ยา การผลิต และโลจิสติกส์จากภายนอก ซึ่งช่วยยกระดับความปลอดภัยในการปฏิบัติงาน ประสิทธิภาพ และความพร้อมในอนาคต

