








เทคโนโลยีการผสมผสานเซ็นเซอร์หลายตัวของ AGV (Automated Guided Vehicle) เพื่อหลีกเลี่ยงสิ่งกีดขวางแบบเรียลไทม์
_%E7%94%BB%E6%9D%BF%201.avif)

ฉัน การแนะนำระบบหลีกเลี่ยงสิ่งกีดขวางแบบเรียลไทม์แบบมัลติเซนเซอร์ฟิวชั่นของ AGV
1. บทนำ
เทคโนโลยีการรวมเซ็นเซอร์เป็นกุญแจสำคัญสำหรับหุ่นยนต์ในการหลีกเลี่ยงสิ่งกีดขวางได้ครอบคลุมทุกพื้นที่ หลักการนี้จำลองมาจากวิธีที่สมองมนุษย์ประมวลผลข้อมูลอย่างบูรณาการ โดยการประสานเซ็นเซอร์หลายตัว (เช่น LIDAR กล้องวิชั่น ฯลฯ) เข้าด้วยกันเพื่อบูรณาการข้อมูลหลายระดับและหลายมิติ เทคโนโลยีนี้ช่วยชดเชยข้อจำกัดของเซ็นเซอร์ตัวเดียว และท้ายที่สุดก็สร้างการรับรู้สภาพแวดล้อมที่สอดคล้องกัน เทคโนโลยีนี้ผสานรวมข้อดีของข้อมูลหลายแหล่ง (เช่น การวัดระยะทางที่แม่นยำและการจดจำวัตถุ) และเพิ่มประสิทธิภาพการประมวลผลข้อมูลผ่านอัลกอริทึมอัจฉริยะ เพื่อให้ AGV สามารถปรับปรุงความแม่นยำในการหลีกเลี่ยงสิ่งกีดขวางและความสามารถในการปรับตัวเข้ากับสภาพแวดล้อมในสภาพแวดล้อมแบบไดนามิกที่ซับซ้อนได้ในเวลาเดียวกัน
2. ปรับปรุงความแม่นยำในการตรวจจับ
การบูรณาการของ LiDAR (การวัดระยะทางที่แม่นยำ แต่แสงสะท้อนอาจรบกวนได้ง่าย) การมองเห็น (การระบุประเภทของวัตถุ แสงน้อยจำกัด) และอัลตราโซนิก (การตรวจจับโซนบอดในระยะใกล้) และข้อมูลเซนเซอร์หลายตัวอื่นๆ ข้อบกพร่องที่เสริมกัน เพื่อเพิ่มความแม่นยำในการระบุสิ่งกีดขวาง
3. เพิ่มความน่าเชื่อถือของระบบ
การออกแบบซ้ำซ้อนช่วยให้แน่ใจว่าเมื่อเซ็นเซอร์ตัวใดตัวหนึ่งล้มเหลว (เช่น ความล้มเหลวของ LIDAR) เซ็นเซอร์ตัวอื่น ๆ ยังคงสามารถหลีกเลี่ยงสิ่งกีดขวางได้ เมื่อใช้ร่วมกับการกรอง Kalman และอัลกอริทึมอื่น ๆ สัญญาณรบกวนจะถูกกรองออกเพื่อปรับปรุงเสถียรภาพของข้อมูล
4. ความสามารถในการปรับตัวต่อสิ่งแวดล้อมที่ขยายออกไป
การสลับแบบไดนามิกเป็นเซ็นเซอร์ที่มีประโยชน์ในการจัดการกับฉากที่ซับซ้อน เช่น สัญญาณรบกวนแม่เหล็กไฟฟ้าเมื่อเลือกข้อมูลป้องกันการรบกวน การผสานสภาพแวดล้อมควันของอัลตราโซนิกและ LiDAR และสำหรับสิ่งกีดขวางโปร่งใส/ยื่นออกมา เพื่อเปิดใช้งานเซ็นเซอร์อินฟราเรดและเซ็นเซอร์พิเศษอื่นๆ
5. เพิ่มประสิทธิภาพการตัดสินใจหลีกเลี่ยงอุปสรรค
ผ่านการตรวจจับพาร์ติชันด้วยเซนเซอร์หลายตัว (เช่น การกำหนดโซนหลีกเลี่ยงสิ่งกีดขวาง/ทางอ้อมด้านหน้า) การบูรณาการระยะห่างของสิ่งกีดขวาง (LIDAR) ประเภท (วิสัยทัศน์) และข้อมูลระยะใกล้ (อัลตราโซนิก) การสร้างแบบจำลองสภาพแวดล้อมทั่วโลก และการวางแผนเส้นทางที่เหมาะสมที่สุดอย่างแม่นยำ
II หลักการหลีกเลี่ยงอุปสรรคฟิวชั่นหลายเซ็นเซอร์
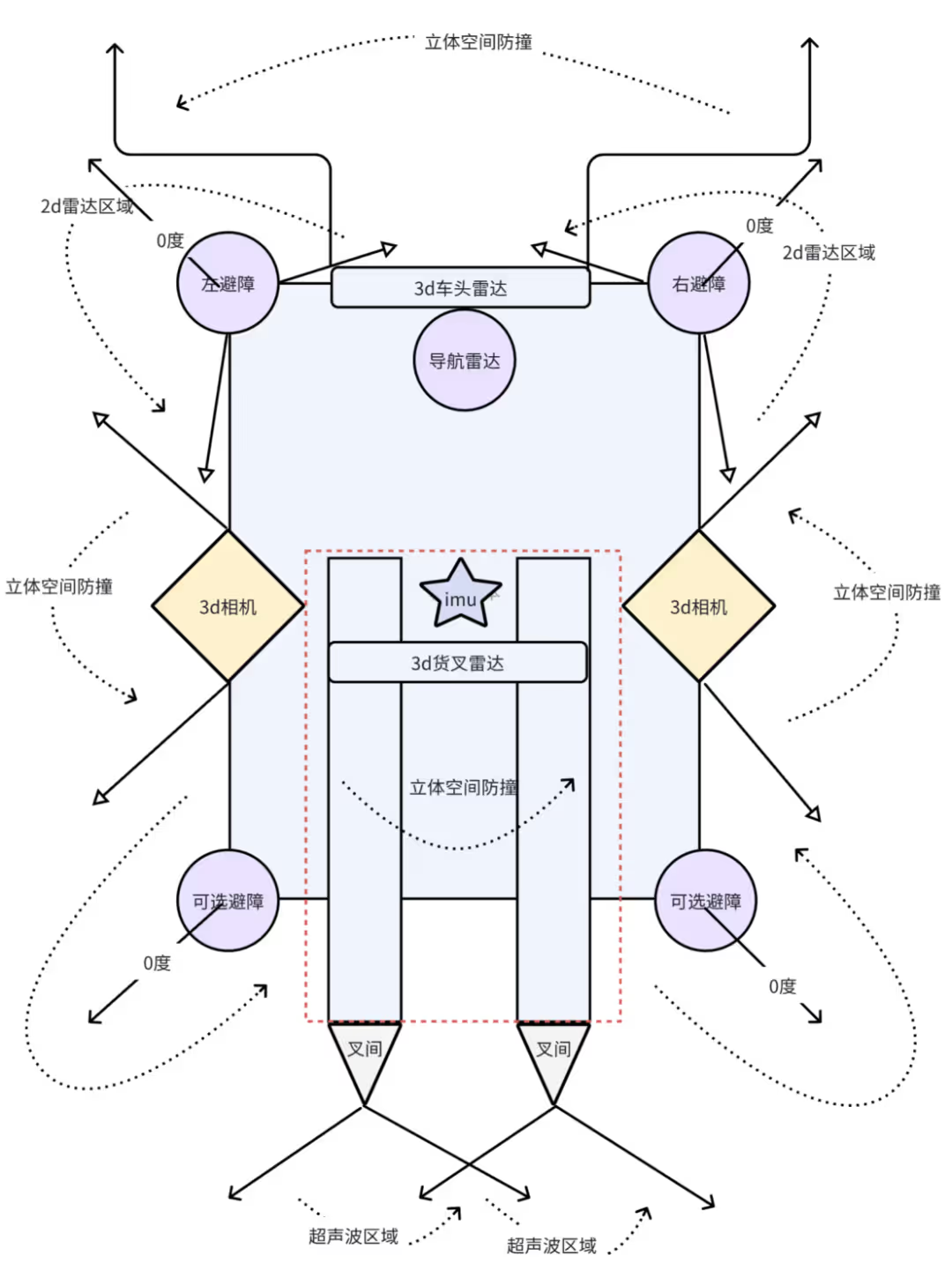
1. รูปแบบทั่วไป
- การหลีกเลี่ยงสิ่งกีดขวางหลักด้านหน้า: อุปสรรคการสแกนเลเซอร์ 2 มิติทางซ้ายและขวาในแนวนอน อัลตราโซนิกด้านล่างเสริมการตรวจจับสิ่งกีดขวางต่ำ เลเซอร์ 3 มิติเฉียงด้านหน้าด้านบนครอบคลุมพื้นที่สามมิติ
- การป้องกันด้านข้าง: กล้องวัดความลึกที่ติดตั้งแบบเอียงทั้งสองด้านเพื่อขจัดจุดบอดด้านข้างของ AGV
- การหลีกเลี่ยงการชนกันของส้อม: ส้อมติดตั้ง IMU เพื่อตรวจสอบท่าทางแบบเรียลไทม์ โดยผสานกับข้อมูลเลเซอร์ 3 มิติด้านบนและด้านล่างเพื่อคาดการณ์วิถีของส้อมแบบไดนามิกและปกป้องพื้นที่โดยรอบ
- การหลีกเลี่ยงการชนกันระหว่างส้อม: เซ็นเซอร์อัลตราโซนิกคู่ตรวจสอบสิ่งกีดขวางในพื้นที่ภาคส่วนทั้งสองด้านของด้านหลังของรถ
2. วิธีการฟิวชั่น
- ระดับข้อมูล: รวมไทม์สแตมป์และระบบพิกัดหลายเซนเซอร์ และผสานข้อมูลคลาวด์จุดโดยตรง
- ระดับคุณสมบัติ : การผสมผสานคุณสมบัติขอบ LiDAR กับคุณสมบัติ SIFT แบบภาพ การเรียนรู้เชิงลึกโดยใช้ PointNet++ (คลาวด์จุด) และ CNN (ภาพ) หรือการสร้างแผนที่ความน่าจะเป็นของสิ่งกีดขวางผ่าน EKF
- ระดับการตัดสินใจ: เครือข่ายเบย์เซียนจะถ่วงน้ำหนักความเชื่อมั่นของเซ็นเซอร์แต่ละตัวแบบไดนามิก อัลตราโซนิกจะสั่งการหยุดฉุกเฉินในสถานการณ์ฉุกเฉิน และ LiDAR จะวางแผนเส้นทางเปลี่ยนเส้นทาง
3. การตรวจจับสภาพแวดล้อม
- การแบ่งงานในระยะไกลและใกล้: คลาวด์จุดเรดาร์ 3 มิติตรวจจับสิ่งกีดขวางทั่วโลกในระยะไกล และกล้องวัดความลึกระบุสิ่งกีดขวางในพื้นที่ในระยะใกล้
- คำจำกัดความของอุปสรรค: รวมถึงผู้คน สินค้า รถยก และวัตถุอื่นๆ ที่มีปริมาตร กระบวนการหลักคือ 'การตรวจจับ → การติดตาม → การระบุตำแหน่ง' (การยืนยันการมีอยู่ → การทำนายวิถี → การคำนวณระยะทาง)
- แผนที่ความหมาย: การติดป้ายหมวดหมู่สิ่งกีดขวาง (เช่น ชั้นวาง ลิฟต์) ผ่านการแบ่งส่วนอินสแตนซ์ การแยกเส้นชั้นความสูงและการแมปไปยังแผนที่เพื่อสนับสนุนการตัดสินใจหลีกเลี่ยงสิ่งกีดขวางอย่างชาญฉลาด
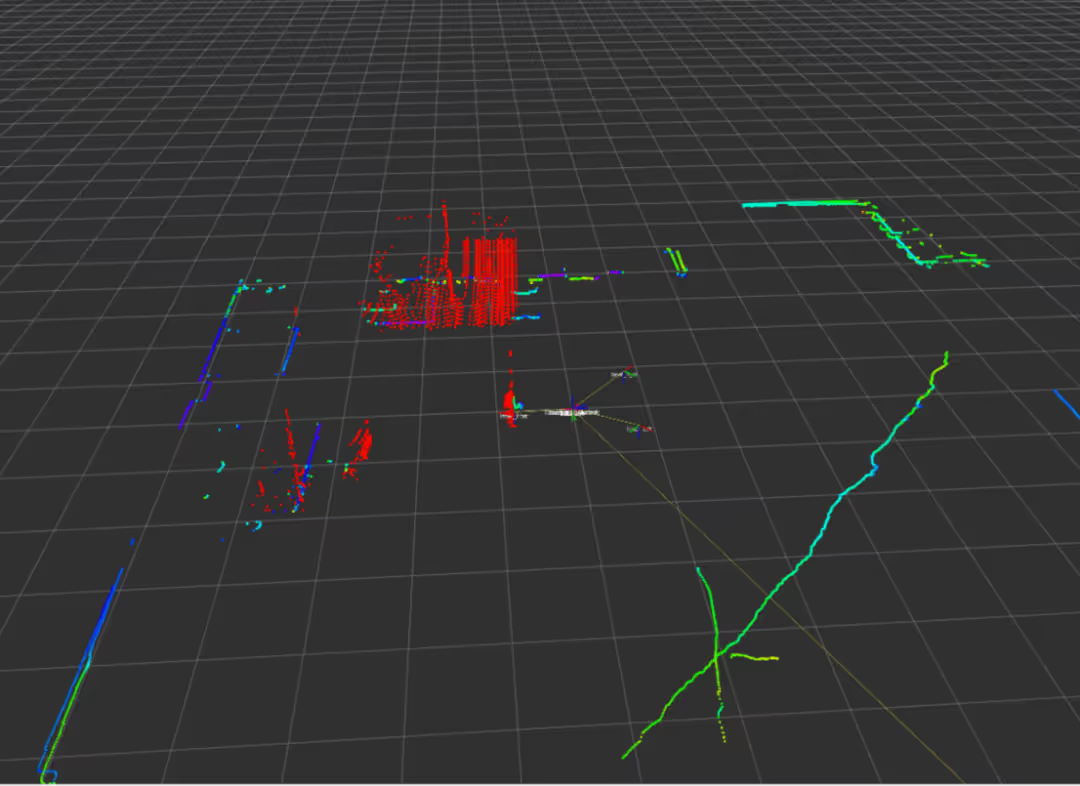
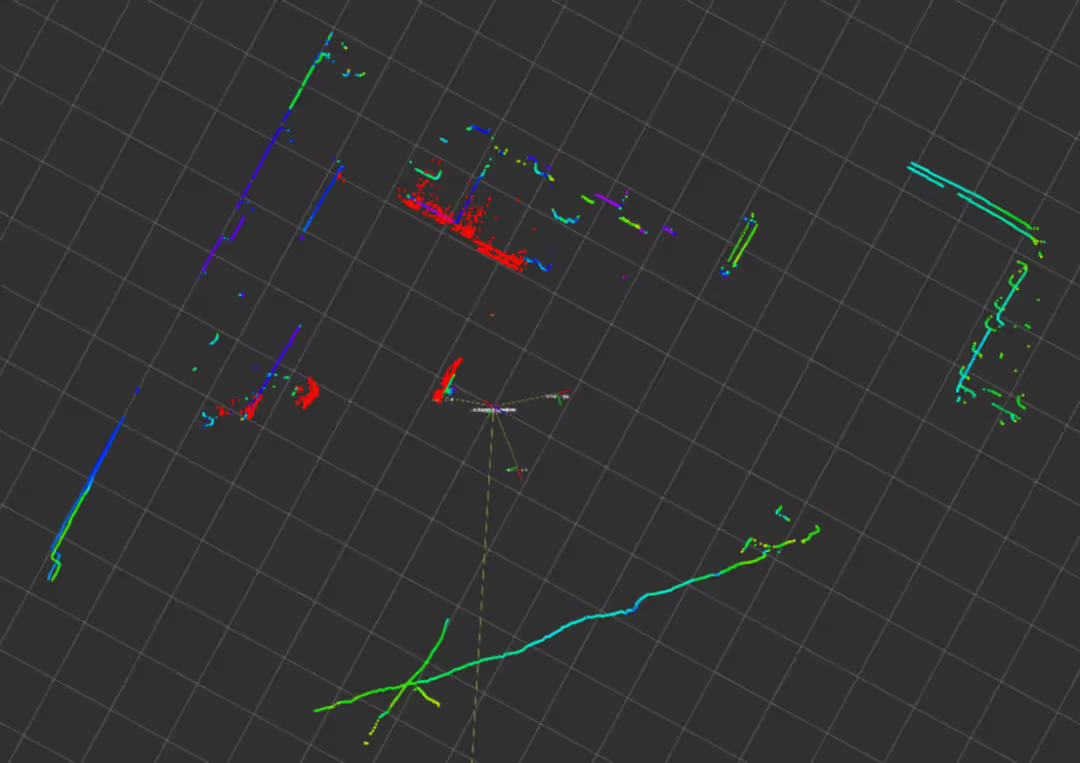
- กระบวนการหลีกเลี่ยงอุปสรรคทั่วโลก: สำหรับปัญหาของข้อมูลกลุ่มจุดขนาดใหญ่และมีสัญญาณรบกวน ขั้นแรกจะดำเนินการกรองและดาวน์แซมปลิง หลังจากแบ่งกลุ่มกลุ่มจุดพื้นดินแล้ว กลุ่มสิ่งกีดขวางพื้นดินจะถูกแบ่งส่วนโดยใช้อัลกอริทึมการจัดกลุ่ม และแอตทริบิวต์ เช่น จุดศูนย์กลาง/มิติ จะถูกติดตั้งกับเฟรมเวิร์กที่ล้อมรอบ เมื่อรวมกับกรอบการทำงานการตรวจจับเป้าหมายของกลุ่มจุด (เช่น PointPillar) จะมีการดำเนินการคำอธิบายประกอบเชิงความหมายและการติดตาม และตัวกรอง Kalman จะถูกสร้างขึ้นเพื่อปรับเส้นทางให้ราบรื่น และมีการเพิ่มประสิทธิภาพของเลขคณิตพร้อมกันเพื่อรับประกันการประมวลผลแบบเรียลไทม์ จำเป็นต้องมีการชดเชยและการแก้ไขเมื่อมีการบิดเบือนของการเคลื่อนไหว แบบเรียลไทม์ จำเป็นต้องมีการแก้ไขการชดเชยเมื่อมีการบิดเบือนของการเคลื่อนไหว
4. อัลกอริทึมการหลีกเลี่ยงอุปสรรคแบบเรียลไทม์
- การหลีกเลี่ยงสิ่งกีดขวางในพื้นที่: กล้องความลึกครอบคลุมบริเวณรอบนอกของลำตัว IMU ของโช้คให้ข้อมูลตอบรับแบบเรียลไทม์ของมุมทัศนคติ และเซนเซอร์ด้านล่างจะตรวจสอบสิ่งกีดขวางในเชิงพื้นที่
- การวางแผนเส้นทางใหม่: ขึ้นอยู่กับความเร็วของ AGV (รอบ 100-200 มิลลิวินาที) การสุ่มตัวอย่างเส้นทางที่เป็นไปได้ผ่านวิธีหน้าต่างแบบไดนามิก การคาดการณ์แนวโน้มการเคลื่อนที่ของสิ่งกีดขวางแบบไดนามิก เส้นทางการเพิ่มประสิทธิภาพแบบเรียลไทม์
- ความช่วยเหลือด้านการเรียนรู้การเสริมแรง: รวมกับ DQN, PPO และอัลกอริทึมอื่น ๆ ฝึก AGV ให้ปรับตัวเข้ากับฉากไดนามิกที่ซับซ้อนในสภาพแวดล้อมการจำลองเพื่อปรับปรุงความสามารถในการตัดสินใจโดยอัตโนมัติ
III ความท้าทายในการหลีกเลี่ยงอุปสรรคของฟิวชั่นหลายเซ็นเซอร์และอนาคต
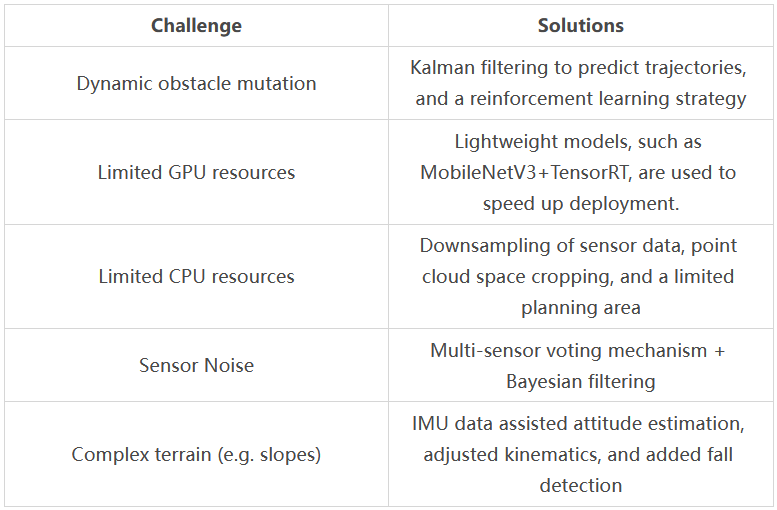
1. สถานการณ์การใช้งาน AGV เพื่อหลีกเลี่ยงสิ่งกีดขวาง
สถานการณ์การใช้งานจริงของ AGV เพื่อหลีกเลี่ยงสิ่งกีดขวางมักพบปัญหาบางประการ ความท้าทายและแนวทางแก้ไขมีดังนี้:
2. ทิศทางในอนาคต
- กลยุทธ์ทางชีวกลศาสตร์: เลียนแบบพฤติกรรมของกลุ่มมด/ฝูงนก เพื่อคาดการณ์วิถีของอุปสรรคแบบไดนามิก
- การผสมผสานระบบประสาท: โมเดลแบบครบวงจร (เช่น PointNet+++Transformer) เพื่อประมวลผลข้อมูล LiDAR และวิสัยทัศน์โดยตรง
- สถาปัตยกรรมคล้ายสมอง: เครือข่ายประสาทกระตุ้น (SNN) สำหรับการตัดสินใจใช้พลังงานต่ำ กลไก LSTM+ความสนใจสำหรับทำนายการเคลื่อนที่ของสิ่งกีดขวางในช่วงเวลาที่ยาวนาน
- การประมวลผลร่วม: การประมวลผลแบบเลเยอร์คลาวด์-เอจ-เอนด์ เพื่อลดแรงกดดันทางคณิตศาสตร์บนบอร์ด
- การจำลองการโยกย้าย: การสุ่มโดเมนเพื่อการสรุปทั่วไปที่ปรับปรุง การปรับแต่งแบบจำลองแบบเรียลไทม์แบบออนไลน์ (เช่น Meta-RL)
- ข้อมูลประชากร: การเรียนรู้แบบรวมศูนย์เพื่อเพิ่มประสิทธิภาพเส้นทาง AGV หลายเส้น ทฤษฎีเกมเพื่อประสานแนวทางเดินรถแบบไดนามิก
- เป้าหมาย: เพื่อสร้างระบบอัจฉริยะของการ 'รับรู้-ตัดสินใจ-ควบคุม' ผ่านอัลกอริทึมที่ได้รับแรงบันดาลใจจากชีวภาพ การทำงานร่วมกันแบบข้ามโดเมน (V2X/ฝาแฝดดิจิทัล) และฮาร์ดแวร์ที่ประหยัดพลังงาน เพื่อให้บรรลุความสามารถในการขับขี่แบบมนุษย์ในสภาพแวดล้อมที่ซับซ้อน โดยคำนึงถึงความปลอดภัย ประสิทธิภาพ และจริยธรรม
สมัครสมาชิก AiTEN Robotics เพื่อรับเนื้อหาทางเทคนิคเพิ่มเติม

