








비전 가이드 AGV란? 비전 가이드 AGV는 자재 취급에 어떻게 사용됩니까?
_%E7%94%BB%E6%9D%BF%201.avif)
1. 비전 가이드 AGV란 무엇인가요?
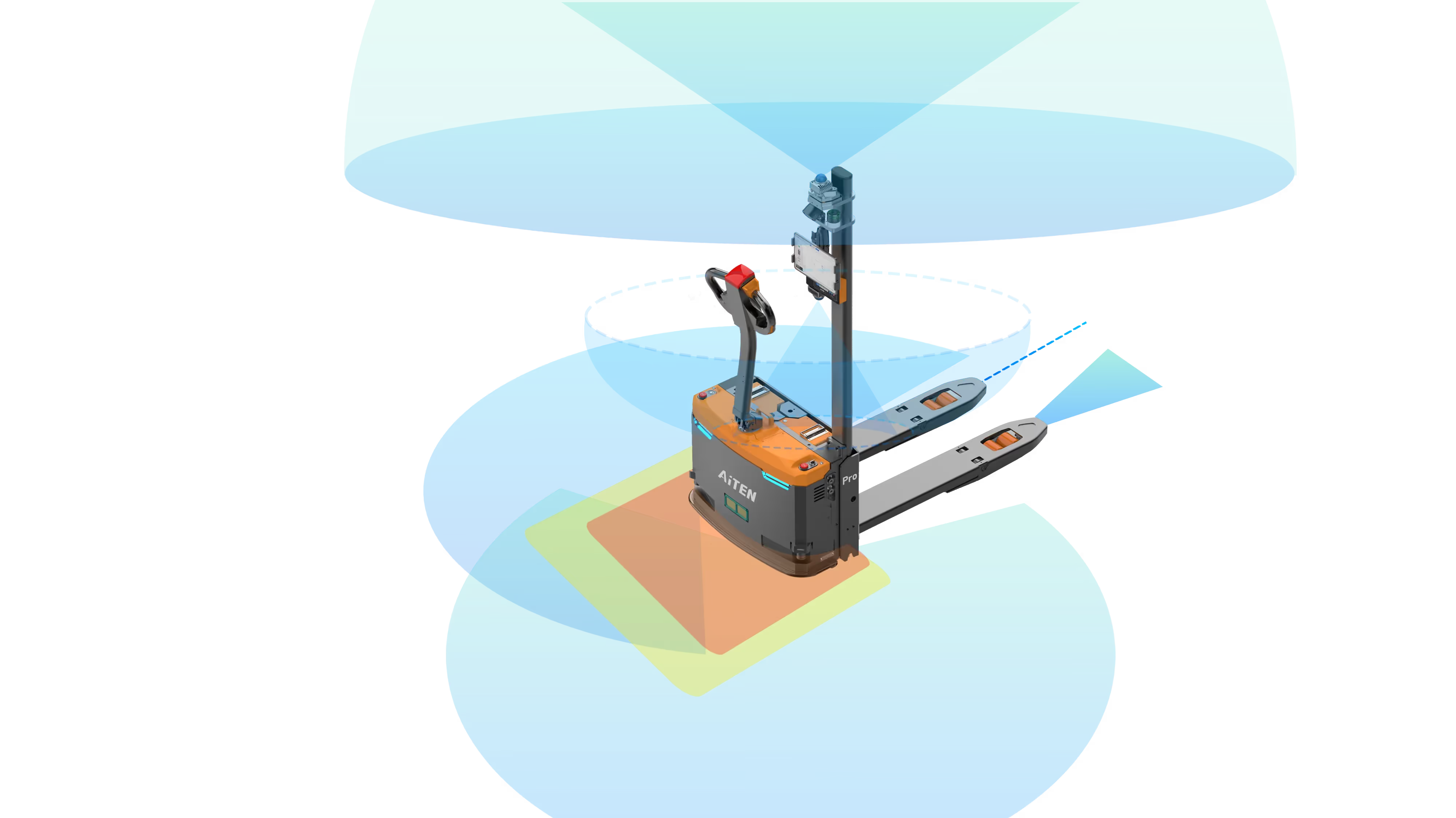
비전 가이드 AGV는 빠르게 발전하고 있는 성숙 단계의 AGV입니다. 이 유형의 AGV에는 CCD 카메라와 센서가 장착되어 있으며, 온보드 컴퓨터에는 AGV의 주행 경로 주변 환경의 이미지 데이터베이스가 제공됩니다.
비전 가이드 AGV는 환경이나 인프라를 변경하지 않고도 설치할 수 있습니다. 카메라를 사용하여 경로를 따라 지형지물을 녹화하는 방식으로 작동하며, AGV는 녹화된 지형지물을 사용하여 경로를 재생하여 탐색할 수 있습니다.
비전 가이드 AGV는 확률론적 체적 센싱을 응용한 Evidence Grid 기술을 사용하며, 카네기멜론 대학의 한스 모라벡 박사가 처음 발명하고 개발했습니다. 에비던스 그리드 기술은 공간의 각 지점에 대한 점유 확률을 사용하여 센서의 성능과 환경의 불확실성을 보정합니다. 기본 내비게이션 센서는 특별히 설계된 스테레오 카메라입니다.
비전 가이드 AGV는 360도 이미지를 사용하여 3D 지도를 구축하므로 사람의 도움이나 특수 기능, 랜드마크 또는 위치추적 시스템의 추가 없이도 학습된 경로를 따라갈 수 있습니다.
비전 가이드 AGV는 역동적이고 유연한 물류 솔루션이 필요한 산업에서 상당한 이점을 제공하여 스마트 팩토리와 인더스트리 4.0을 향한 성장 추세에 기여합니다.
2. 비전 가이드 AGV는 자재 취급에 어떻게 사용됩니까?
AGV 시스템은 센서로 사용되는 하나 이상의 카메라가 장착된 로봇으로, 로봇 컨트롤러에 2차 피드백 신호를 제공하여 가변 목표 위치로 보다 정확하게 이동할 수 있도록 합니다. 비전 가이드 AGV는 자재 취급, 자동 조립, 농업 애플리케이션, 생명 과학 등 로봇 셀의 설계 및 설정과 관련된 고정 툴링의 비용과 복잡성을 획기적으로 줄이면서 로봇의 적응성을 높이고 보다 쉽게 구현할 수 있게 하여 생산 공정을 빠르게 변화시키고 있습니다. 자재 취급에 사용되는 비전 가이드 AGV의 고전적이지만 다소 오래된 한 예로, 비전 시스템(카메라와 소프트웨어)은 재활용 컨베이어에 무작위로 공급되는 제품의 위치를 결정합니다. 비전 시스템은 구성품의 정확한 위치 좌표를 로봇에 제공하며, 이 좌표는 카메라 시야 아래에 무작위로 펼쳐져 로봇 팔이 부착된 엔드 이펙터(그리퍼)를 선택한 구성품에 배치하고 컨베이어 벨트에서 피킹할 수 있도록 합니다. 컨베이어는 카메라 아래에서 정지하여 부품의 위치를 결정하거나, 사이클 시간이 충분한 경우 비전 소프트웨어를 통해 움직이는 부품을 추적하는 제어 방식(일반적으로 컨베이어에 인코더를 장착하고 이 피드백 신호를 사용하여 비전 및 동작 제어 루프를 업데이트하고 동기화하는 방식)을 사용하여 컨베이어를 정지하지 않고 부품을 피킹할 수 있으며, 이러한 기능은 현재 비전 가이드 AGV 분야에서 일반적입니다. 이 기술은 빠르게 진화하고 있으며, 수동 개입을 줄이고, 안전을 개선하며, 품질을 높이고, 생산성을 높이는 등 자재 취급 및 숙련 인건비에서 경제적으로 유리한 것으로 입증되고 있습니다.
현재 에이텐은 비전 가이드 AGV를 제공하지 않습니다. 그러나 APe15 및 MP10과같은 제품은 이미 광범위한 산업 분야에서 뛰어난 성능을 제공하여 다양한 산업 자동화 요구 사항을 충족하고 있으며, 지능형 AGV 솔루션으로 운영을 업그레이드하려는 경우 지금 바로 AiTEN에 문의하십시오. 고객의 특정 운영 환경에 맞춘 무료 타당성 분석을 제공하여 스마트 팩토리 전환에 가장 적합한 자동화 솔루션을 찾을 수 있도록 도와드립니다.

