








AGV의 동적 경로 계획 알고리즘 공개
_%E7%94%BB%E6%9D%BF%201.avif)
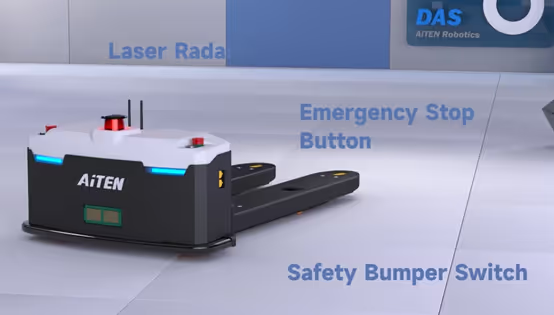
현대의 창고, 물류, 제조 분야에서는 무인 운반차(AGV)가 점점 더 보편화되고 있습니다. 부지런한 일개미처럼 복잡한 환경을 자율적으로 탐색하며 자재 취급 작업을 효율적으로 완수합니다. AGV가 지능형 내비게이션을 구현할 수 있는 핵심 기술 중 하나는 경로 계획입니다. 특히 환경이 정적이지 않은 경우 동적 경로 계획 기능이 매우 중요합니다. 이 문서에서는 몇 가지 주요 동적 경로 계획 알고리즘(예: A, Dijkstra, RRT 등)을 살펴보고 이러한 알고리즘이 AGV 업계에서 어떻게 큰 영향을 미치고 있는지 설명합니다.
동적 경로 계획이 필요한 이유는 무엇인가요?
기존의 정적 경로 계획은 AGV가 작업을 수행하는 동안 환경이 완전히 알려져 있고 변경되지 않는다고 가정합니다. 그러나 현실 세계는 변수로 가득합니다:
- 갑자기 나타나는 일시적인 장애물(예: 쓰러진 화물, 보행자 또는 기타 차량)
- 교통 통제 구역 변경
- 목표 지점 또는 작업의 일시적 조정
이러한 상황에서 AGV는 실시간으로 환경 변화를 감지하고 신속하게 경로를 다시 계획할 수 있어야 합니다. 이때 동적 경로 계획이 중요한 역할을 합니다. 동적 경로 계획은 변화하는 환경에 적응할 수 있는 지능을 AGV에 제공하여 복잡하고 역동적인 환경에서도 안전하고 효율적으로 계속 작동할 수 있도록 합니다.
주요 경로 계획 알고리즘 분석
1. 디크스트라의 알고리즘
디크스트라의 알고리즘은 단일 소스 노드에서 그래프의 다른 모든 노드까지 최단 경로를 찾는 데 사용되는 고전적인 그래프 검색 알고리즘입니다.
↪cf_200D↩핵심아이디어:
소스 노드에서 시작하여 알고리즘은 물결처럼 바깥으로 퍼져나갑니다. 매번 소스 노드에서 가장 가까운 미방문 노드를 방문하여 이웃 노드와의 거리를 업데이트합니다.
프로세스:↪cf_200D↩
- 초기화: 시작점과의 거리를 0으로, 다른 지점과의 거리를 무한대로 설정합니다. 방문할 노드의 우선순위 대기열을 생성합니다(거리별로 정렬).
- 반복: 대기열에서 거리가 가장 작은 노드 u를 제거합니다.
- 휴식: u의 각 이웃 v에 대해, u에서 v까지의 경로가 더 짧으면 v의 거리를 업데이트하고 대기열에 추가합니다.
- 표시: 방문한 것으로 표시합니다.
- 반복: 대상 노드가 검색되거나 대기열이 비워질 때까지 계속합니다.
AGV 애플리케이션:
- 장점: 에지 가중치가 음수가 아닌 경우 전역 최단 경로를 찾을 수 있도록 보장합니다.
- 단점: 검색 범위가 넓고, 방향성이 없으며, 계산 효율이 낮습니다(특히 큰 지도에서). 동적 장애물이 있으면 전역 경로를 다시 계산해야 하므로 실시간 성능이 저하됩니다.
- 포지셔닝: 다른 알고리즘(예: A*)의 기초로 사용되거나 간단한 환경에서 자주 사용됩니다.
2. A* 알고리즘
A*(A-Star) 알고리즘은 디크스트라 알고리즘을 최적화한 것입니다. 휴리스틱 정보를 도입하여 검색 방향을 안내하므로 대상을 더 빨리 찾을 수 있습니다.
핵심 아이디어: 다음 방문 노드를 선택할 때는 다음 사항을 동시에 고려하세요:
- g(n): 시작점에서 노드 n까지의 실제 경로 비용입니다.
- h(n): 노드 n에서 목표까지의 예상 비용(맨해튼/유클리드 거리와 같은 휴리스틱 함수)입니다.
- 평가 함수: f(n) = g(n) + h(n)
- 주요 요구 사항: 최적의 해를 찾기 위해 h(n)은 허용 가능성(예상값 ≤ 실제값)과 일관성을 만족해야 합니다.
프로세스: 디크스트라와 유사하지만 우선순위 대기열은 f(n)을 기준으로 정렬되며, f(n)이 가장 작은 노드가 확장 우선순위를 가지므로 검색이 목표를 향해 보다 방향성 있게 진행됩니다.
AGV 애플리케이션:
- 장점: 휴리스틱 함수가 조건을 충족할 때 최적의 경로를 보장하며 일반적으로 Dijkstra보다 훨씬 효율적입니다. AGV 글로벌 경로 계획에 널리 사용됩니다.
- 단점: 휴리스틱 함수 선택에 따라 성능이 영향을 받고, 메모리 사용량이 많을 수 있으며, 환경이 자주 바뀌면 여전히 재계획이 필요합니다.
- 동적 변형: 동적 환경을 처리하기 위해 D*, LPA*, D* Lite와 같은 알고리즘을 사용할 수 있습니다. 이러한 알고리즘은 환경이 변경될 때 경로를 완전히 다시 계산하지 않고 점진적으로 업데이트하여 응답 속도를 크게 향상시킬 수 있습니다. D* Lite는 AGV의 동적 장애물 회피에 일반적으로 사용되는 알고리즘입니다.

3. RRT* 알고리즘
RRT*(랜덤 트리 스타를 빠르게 탐색)는 샘플링 기반 경로 계획 알고리즘으로, 특히 고차원 공간과 복잡한 제약 조건(예: 차량 운동학)에 적합합니다.
핵심 아이디어:
알고리즘은 상태 공간에서 무작위로 지점을 샘플링하여 원점에서부터 점진적으로 트리를 성장시켜 공간을 탐색합니다. RRT*는 RRT의 최적화된 버전으로, 경로가 점근적으로 최적에 가까워질 수 있도록 재배선 단계를 통합합니다(샘플링 포인트가 많을수록 경로가 최적에 가까워집니다).
프로세스:
- 샘플링: 상태 공간에서 점 x_rand를 무작위로 생성합니다.
- 가장 가까운 이웃을 찾습니다: 트리에서 x_rand에 가장 가까운 노드 x_nearest를 찾습니다.
- 확장(조종): 장애물을 피해 x_nearest에서 x_rand까지 스텝 길이를 연장하여 새 노드 x_new를 얻습니다.
- 부모 노드(RRT* 특정)를 선택합니다: x_new 근처의 노드를 검색하고 시작점에서 x_new까지의 총 경로 비용을 최소화하는 노드 x_min을 부모 노드로 선택합니다(충돌을 피해야 함).
- 리와이어(RRT* 전용): x_new 근처의 노드를 검색합니다. x_new를 통해 연결하면 총 경로 비용이 줄어드는 경우 해당 노드의 부모 노드를 x_new로 업데이트합니다.
- 추가: 추가: 트리에 x_new와 연결된 가장자리를 추가합니다.
- 반복: 트리가 대상 영역 근처까지 확장될 때까지 계속합니다.
AGV 애플리케이션:
- 장점: 고차원 상태(자세, 속도 등)와 복잡한 제약 조건을 처리하는 강력한 기능, 명시적인 환경 맵이 필요하지 않음, 확률적 완전성(경로가 존재하면 결국 경로가 발견됨), RRT는 점근적 최적성을 갖습니다.
- 단점: 경로가 엄격하게 최적이 아님(무한 샘플링을 사용하지 않는 한), 경로가 매끄럽지 않을 수 있음(후처리 필요), 성능이 매개 변수에 민감함, 수렴이 느릴 수 있음.
- 동적 변형: 동적 장애물과 충돌하고 계속 성장하는 트리의 일부를 제거/업데이트하여 리플래닝을 수행하는 동적 RRT를 예로 들 수 있습니다.

AGV에서 동적 경로 계획의 실제 적용 사례
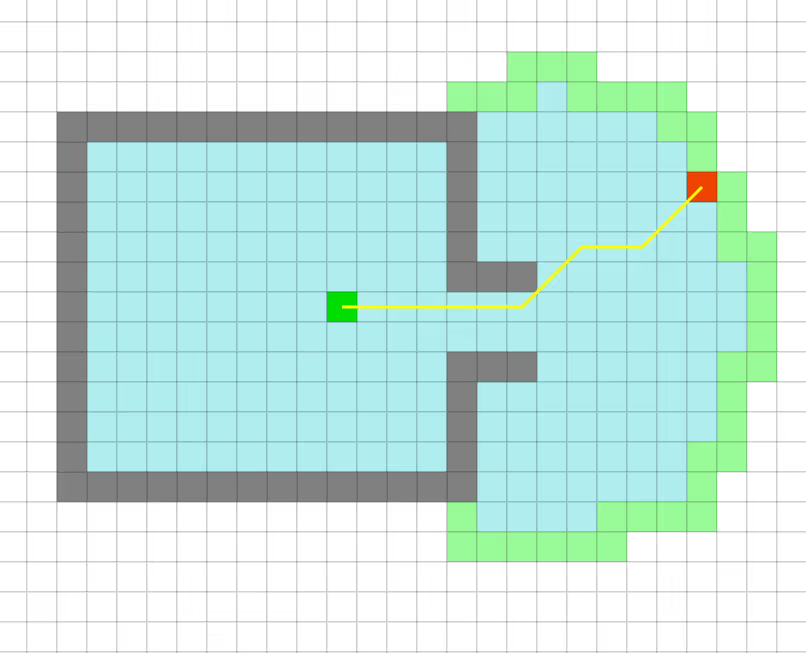
AGV 장애물 회피 애플리케이션 시나리오
실제 AGV 애플리케이션에서는 단일 알고리즘을 단독으로 사용하는 경우는 거의 없으며, 일반적으로 여러 알고리즘을 조합하여 사용합니다:
1. 글로벌 경로 계획:
A* 또는 그 변형(예: D-Lite)을 사용하거나 때로는 Dijkstra 알고리즘의 최적화된 버전을 사용하여 알려진 지도에서 출발점에서 목적지까지 글로벌 최적 또는 차선의 경로를 계획합니다. 이 경로는 일반적으로 상당히 거시적인 수준입니다.
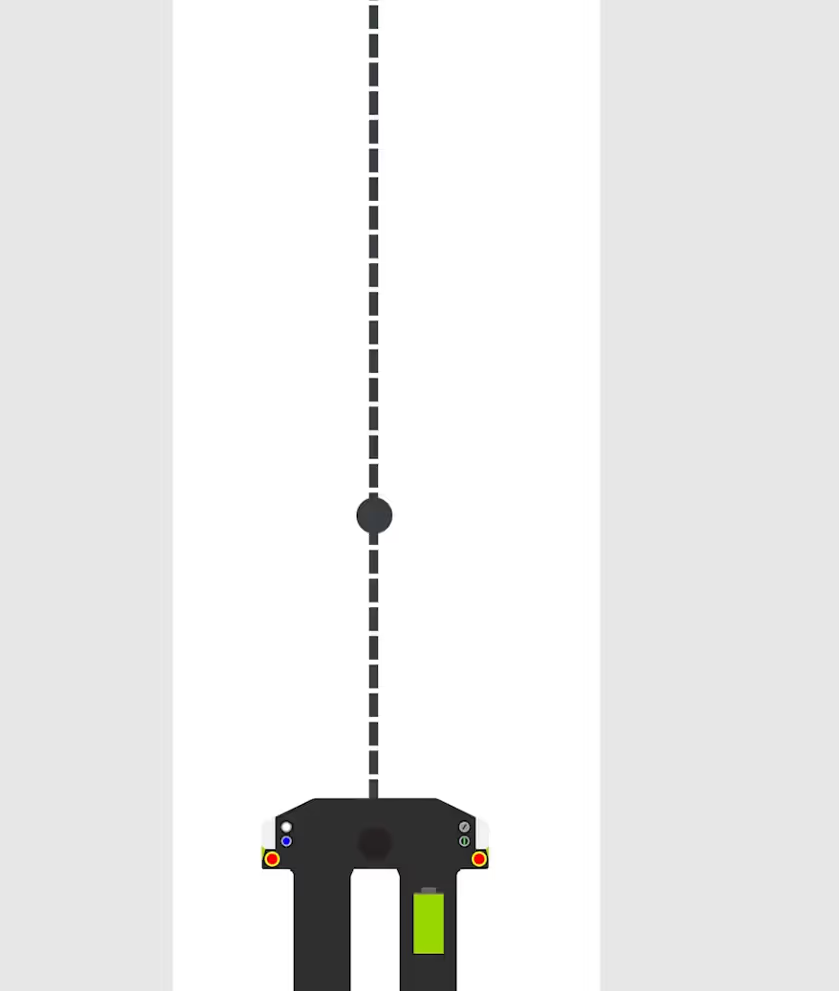
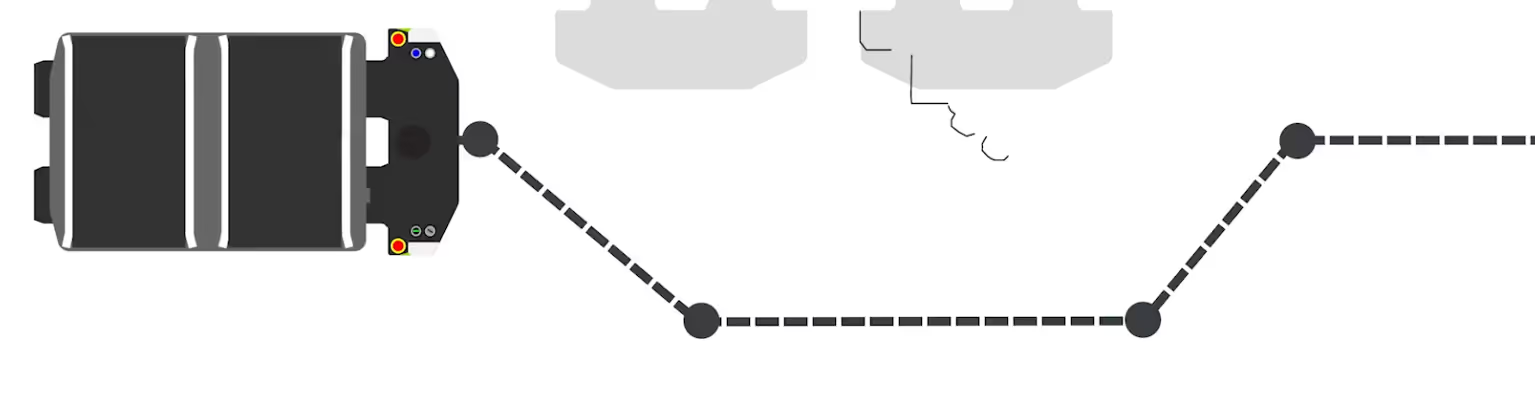
2. 로컬 경로 계획/동적 장애물 회피:
AGV는 글로벌 경로를 따라가는 동안 센서(라이더 또는 카메라 등)를 사용하여 주변 환경을 지속적으로 감지합니다. 예상치 못한 장애물(정적 또는 동적)이 감지되면 로컬 플래너(DWA - 동적 창 접근법, TEB - 시간 탄성 밴드 또는 빠른 재계획이 가능한 A/RRT의 변형)가 개입하여 글로벌 경로의 안내에 따라 안전하고 차량 운동학에 제약이 없는 단기적인 로컬 장애물 회피 경로를 생성합니다.

3. 경로 추적:
제어 알고리즘은 계획된 경로(글로벌 또는 로컬)를 따라 AGV를 정밀하게 주행하는 역할을 합니다.
이 계층적 계획 전략은 글로벌 최적화와 로컬 실시간 성능의 균형을 유지합니다. D 라이트와 같은 알고리즘은 효율적인 점진적 재계획 기능으로 인해 로컬 동적 변경을 처리하는 데 탁월합니다. 반면 RRT와 그 변형은 복잡한 환경과 모션 제약 조건을 처리하는 데 더 유리합니다.
도전 과제와 미래 트렌드
1. 도전 과제
동적 경로 계획 기술의 상당한 발전에도 불구하고 AGV 산업 애플리케이션에는 여전히 과제가 남아 있습니다:
- 실시간 요구 사항: 특히 고속 작업이나 트래픽이 밀집된 시나리오에서는 알고리즘이 밀리초 내에 계산을 완료해야 합니다.
- 환경적 불확실성: 센서 노이즈, 위치 오류, 동적 장애물 예측의 어려움.
- 다중 AGV 조정: 충돌과 교착 상태를 방지하여 효율적인 협업을 달성하세요.
- 복잡한 운동학적 제약 조건: AGV 크기, 회전 반경, 가속/감속 성능을 고려합니다.
2. 미래 트렌드
앞으로 동적 경로 계획은 더욱 스마트하고 효율적인 솔루션으로 발전할 것입니다:
- 머신러닝 통합: 강화 학습, 모방 학습 및 기타 방법을 활용하여 AGV가 최적의 내비게이션 전략을 자율적으로 학습할 수 있도록 지원합니다.
- 예측 계획: 다른 동적 장애물(예: 보행자 및 차량)의 의도와 궤적을 예측하여 미리 계획하세요.
- 시맨틱 이해: AGV가 환경의 시맨틱 정보(예: '인도' 및 '충전 구역')를 이해하여 시나리오에 더 적합한 의사 결정을 내릴 수 있도록 지원합니다.
- 인간과 기계의 협업: 인간과 기계가 공존하는 환경에서 보다 안전하고 자연스러운 상호 작용과 회피를 실현하세요.
결론
Dijkstra, A, RRT 및 그 동적 변형은 AGV 동적 경로 계획 알고리즘 라이브러리의 핵심 툴입니다. 이 알고리즘은 AGV의 '지능형 눈'이자 '동적 스티어링 휠' 역할을 하여 복잡한 환경을 유연하고 효율적으로 탐색할 수 있게 해줍니다. 이러한 알고리즘의 원리와 특성을 이해하는 것은 AGV 기술 및 광범위한 자동화 분야의 발전을 위해 매우 중요합니다. 알고리즘이 발전하고 계산 능력이 향상됨에 따라 미래의 AGV는 의심할 여지 없이 더 스마트하고, 더 안정적이며, 더 효율적이 될 것입니다.
중국 쑤저우에 본사를 둔 아이텐 로보틱스는 자율주행 산업용 차량(AMR/AGV) 및 물류 자동화 솔루션 분야의 글로벌 리더입니다. 아이텐 로보틱스는 풀스택 자재 취급 시나리오의 요구 사항을 충족하기 위해 10가지 제품 시리즈를 개발했습니다. 아이텐 로보틱스는 30개 이상의 국가 및 지역에서 200개 이상의 프로젝트를 구축했으며 자동차, 식음료, 화학, 제약, 제조 및 제3자 물류와 같은 산업 전반에서 수많은 포춘 500대 기업의 신뢰를 받으며 운영 안전, 효율성 및 미래 대비를 향상시키고 있습니다.

