








Membongkar Algoritma Perancangan Laluan Dinamik dalam AGV
_%E7%94%BB%E6%9D%BF%201.avif)
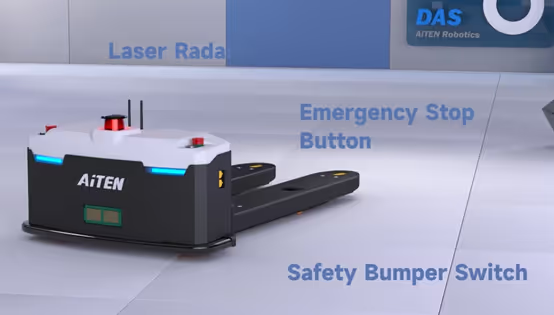
Dalam pergudangan moden, logistik dan pembuatan, kenderaan berpandu automatik (AGV) menjadi semakin biasa. Seperti semut pekerja yang rajin, mereka mengemudi persekitaran yang kompleks secara autonomi, menyelesaikan tugas pengendalian bahan dengan cekap. Salah satu teknologi teras yang membolehkan AGV mencapai navigasi pintar ialah perancangan laluan. Terutamanya apabila persekitaran tidak statik, keupayaan perancangan laluan dinamik menjadi penting. Artikel ini akan menyelidiki beberapa algoritma perancangan laluan dinamik arus perdana (seperti A, Dijkstra, RRT, dsb.) dan menerangkan cara ia memberi kesan yang ketara dalam industri AGV.
Mengapa Perancangan Laluan Dinamik Diperlukan?
Perancangan laluan statik tradisional menganggap bahawa persekitaran diketahui sepenuhnya dan kekal tidak berubah semasa AGV melaksanakan tugasnya. Walau bagaimanapun, dunia sebenar penuh dengan pembolehubah:
- Halangan sementara yang muncul secara tiba-tiba (seperti kargo yang jatuh, pejalan kaki atau kenderaan lain)
- Menukar kawasan kawalan lalu lintas
- Pelarasan sementara pada titik sasaran atau tugas
Dalam situasi ini, AGV perlu dapat merasakan perubahan dalam persekitaran mereka dalam masa nyata dan merancang semula laluan mereka dengan cepat. Di sinilah perancangan laluan dinamik dimainkan. Ia memberi AGV kecerdasan untuk menyesuaikan diri dengan keadaan yang berubah-ubah, memastikan bahawa mereka boleh terus beroperasi dengan selamat dan cekap dalam persekitaran yang kompleks dan dinamik.
Analisis Algoritma Perancangan Laluan Aliran Perdana
1. Algoritma Dijkstra
Algoritma Dijkstra ialah algoritma carian graf klasik yang digunakan untuk mencari laluan terpendek daripada satu nod sumber kepada semua nod lain dalam graf.
Idea Teras:
Bermula dari nod sumber, algoritma merebak ke luar seperti riak dalam air. Setiap kali, ia melawati nod yang tidak dilawati yang terdekat dengan nod sumber dan mengemas kini jarak kepada jirannya.
Proses:
- Permulaan: Tetapkan jarak dari titik permulaan kepada 0 dan jarak dari titik lain ke infiniti. Buat baris gilir keutamaan nod untuk dilawati (diisih mengikut jarak).
- Lelaran: Keluarkan nod u dengan jarak terkecil dari baris gilir.
- Relaksasi: Untuk setiap jiran v u, jika laluan dari u ke v lebih pendek, kemas kini jarak v dan tambahkannya pada baris gilir.
- Mark: Tandakan anda sebagai dilawati.
- Ulang: Teruskan sehingga nod sasaran diambil semula atau baris gilir kosong.
Permohonan AGV:
- Kelebihan: Menjamin mencari laluan terpendek global (apabila pemberat tepi bukan negatif).
- Kelemahan: Julat carian yang besar, tiada arah, kecekapan pengiraan yang rendah (terutama pada peta yang besar). Halangan dinamik memerlukan pengiraan semula laluan global, mengakibatkan prestasi masa nyata yang lemah.
- Kedudukan: Selalunya digunakan sebagai asas untuk algoritma lain (seperti A*) atau dalam persekitaran mudah.
2. A* Algoritma
Algoritma A* (A-Star) ialah pengoptimuman algoritma Dijkstra. Ia memperkenalkan maklumat heuristik untuk membimbing arah carian, dengan itu mencari sasaran dengan lebih cepat.
Idea teras: Apabila memilih nod seterusnya untuk dilawati, pertimbangkan perkara berikut serentak:
- g(n): Kos laluan sebenar dari titik permulaan ke nod n.
- h(n): Anggaran kos dari nod n ke matlamat (fungsi heuristik, seperti jarak Manhattan/Euclidean).
- Fungsi penilaian: f(n) = g(n) + h(n)
- Keperluan utama: h(n) mesti memenuhi kebolehterimaan (nilai anggaran ≤ nilai sebenar) dan ketekalan untuk memastikan mencari penyelesaian yang optimum.
Proses: Serupa dengan Dijkstra, tetapi baris gilir keutamaan diisih mengikut f(n), dan nod dengan f(n) terkecil diutamakan untuk pengembangan, menjadikan carian lebih terarah ke arah matlamat.
Permohonan AGV:
- Kelebihan: Menjamin laluan optimum apabila fungsi heuristik memenuhi syarat dan biasanya jauh lebih cekap daripada Dijkstra. Digunakan secara meluas dalam perancangan laluan global AGV.
- Kelemahan: Prestasi dipengaruhi oleh pilihan fungsi heuristik; penggunaan ingatan mungkin tinggi; perancangan semula masih diperlukan apabila persekitaran sering berubah.
- Varian Dinamik: Untuk menangani persekitaran dinamik, algoritma seperti D*, LPA* dan D* Lite tersedia. Algoritma ini boleh mengemas kini laluan secara berperingkat (daripada mengira semula sepenuhnya) apabila persekitaran berubah, meningkatkan kelajuan tindak balas dengan ketara. D* Lite ialah algoritma yang biasa digunakan untuk mengelakkan halangan dinamik dalam AGV.

3. Algoritma RRT*
RRT* (Menjelajah Random Tree Star dengan pantas) ialah algoritma perancangan laluan berasaskan pensampelan yang amat sesuai untuk ruang berdimensi tinggi dan kekangan kompleks (seperti kinematik kenderaan).
Idea teras:
Dengan mengambil titik persampelan secara rawak dalam ruang keadaan, algoritma secara progresif menumbuhkan pokok bermula dari asal untuk meneroka ruang. RRT* ialah versi RRT yang dioptimumkan, menggabungkan langkah pendawaian semula untuk membolehkan laluan menghampiri keoptimuman secara asimptotik (semakin banyak titik pensampelan, semakin hampir laluan itu kepada optimum).
Proses:
- Persampelan: Menjana titik x_rand secara rawak dalam ruang keadaan.
- Cari jiran terdekat: Cari nod x_paling dekat dalam pokok yang paling hampir dengan x_rand.
- Lanjutkan (Steer): Panjangkan satu langkah dari x_nearrest ke x_rand (mengelakkan halangan) untuk mendapatkan nod baharu x_new.
- Pilih Nod Induk (RRT* Spesifik): Cari nod berhampiran x_new dan pilih nod x_min yang meminimumkan jumlah kos laluan dari titik permulaan kepada x_new sebagai nod induknya (perlanggaran mesti dielakkan).
- Rewire (khusus RRT*): Cari nod berhampiran x_new. Jika menyambung melalui x_new mengurangkan jumlah kos laluan mereka, kemas kini nod induk nod ini kepada x_new.
- Tambah: Tambahkan x_new dan tepi bersambungnya pada pokok.
- Ulang: Teruskan sehingga pokok mengembang ke sekitar kawasan sasaran.
Permohonan AGV:
- Kelebihan: Keupayaan kuat untuk mengendalikan keadaan dimensi tinggi (pose, halaju, dll.) dan kekangan yang kompleks; tiada peta persekitaran yang jelas diperlukan; kesempurnaan kebarangkalian (jika laluan wujud, ia akhirnya akan ditemui); RRT mempunyai optimum asimptotik.
- Kelemahan: Laluan tidak optimum sepenuhnya (melainkan pensampelan tak terhingga digunakan); laluan mungkin tidak lancar (pasca pemprosesan diperlukan); prestasi adalah sensitif kepada parameter; penumpuan mungkin perlahan.
- Varian dinamik: cth, RRT Dinamik, yang mencapai perancangan semula dengan mengalih keluar/mengemas kini bahagian pokok yang bertembung dengan halangan dinamik dan terus berkembang.

Aplikasi Praktikal Perancangan Laluan Dinamik dalam AGV
Senario Aplikasi Mengelak Halangan AGV
Dalam aplikasi AGV sebenar, satu algoritma jarang digunakan secara bersendirian; sebaliknya, gabungan algoritma biasanya digunakan:
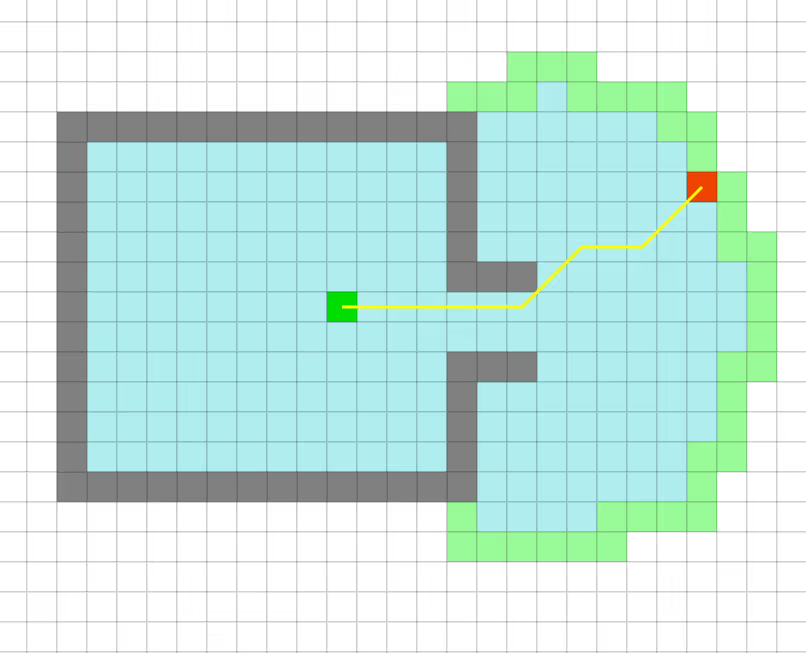
1. Perancangan Laluan Global:
Menggunakan A* atau variannya (seperti D-Lite) atau kadangkala versi optimum algoritma Dijkstra, laluan optimum atau suboptimum global dirancang dari titik permulaan ke destinasi pada peta yang diketahui. Laluan ini biasanya agak makro.
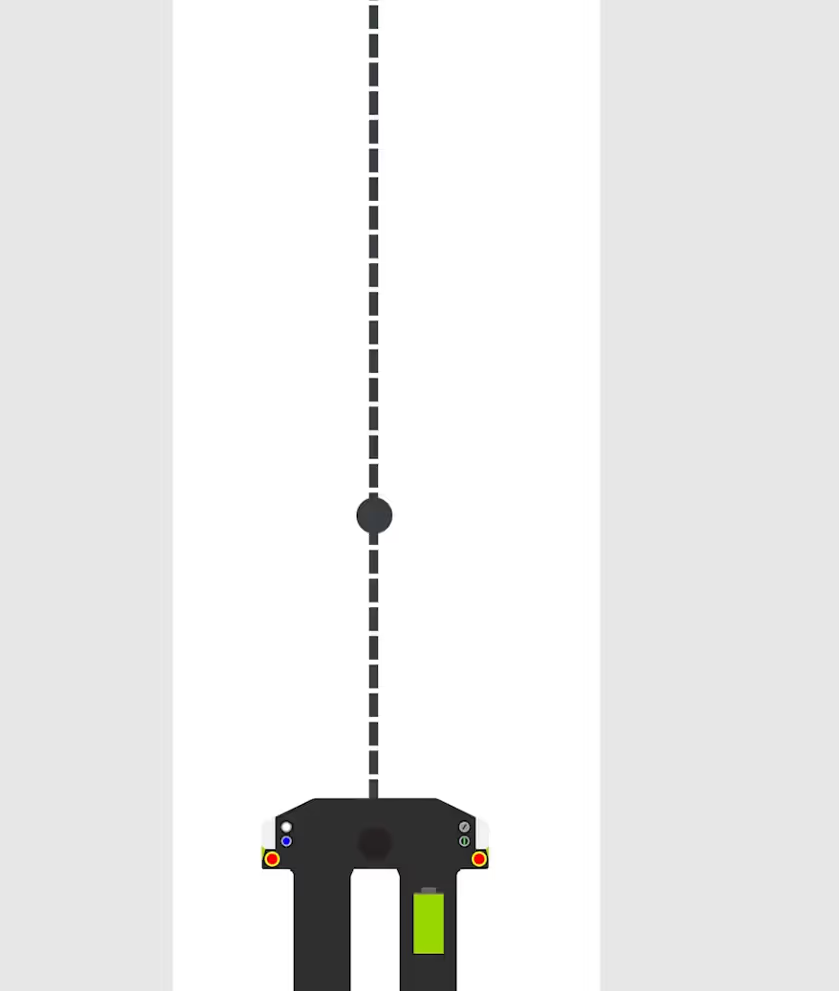
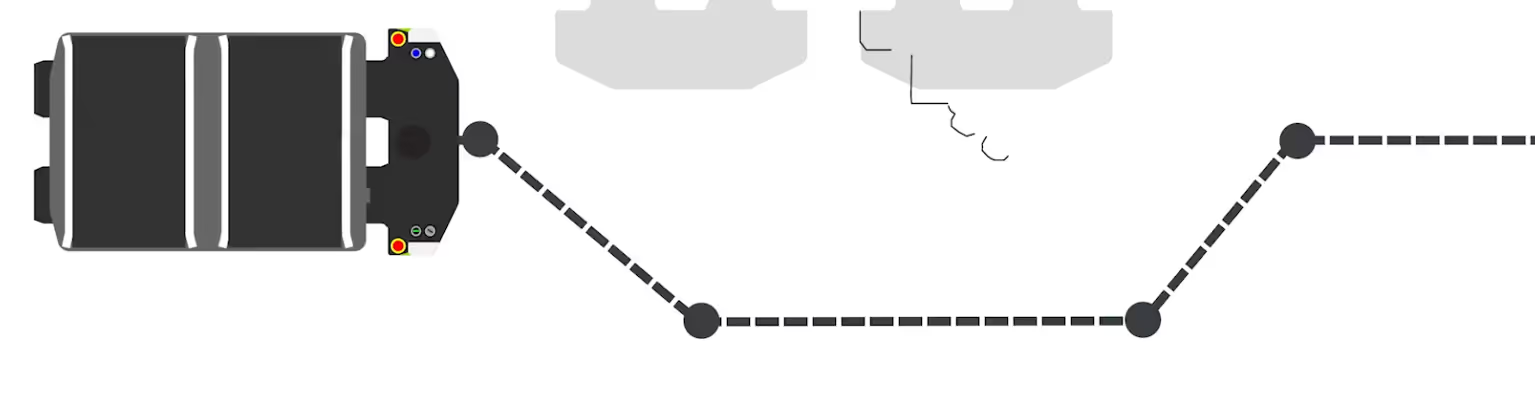
2. Perancangan Laluan Tempatan/Pengelak Halangan Dinamik:
Semasa mengikuti laluan global, AGV menggunakan penderia (seperti lidar atau kamera) untuk terus mengesan persekitaran sekeliling. Sebaik sahaja halangan yang tidak dijangka (statik atau dinamik) dikesan, perancang tempatan (yang mungkin berdasarkan DWA - Pendekatan Tetingkap Dinamik, TEB - Jalur Elastik Bermasa atau varian A/RRT dengan perancangan semula pantas) campur tangan untuk menjana jangka pendek, selamat dan kinematik kenderaan yang dikekang laluan tempatan di bawah bimbingan laluan pengelakan global

3. Penjejakan Laluan:
Algoritma kawalan bertanggungjawab untuk memandu AGV dengan tepat di sepanjang laluan yang dirancang (sama ada global atau tempatan).
Strategi perancangan hierarki ini mengimbangi optimum global dan prestasi masa nyata tempatan. Algoritma seperti D Lite cemerlang dalam mengendalikan perubahan dinamik tempatan kerana keupayaan perancangan semula tambahan yang cekap. RRT dan variannya, sebaliknya, lebih berfaedah dalam mengendalikan persekitaran yang kompleks dan kekangan gerakan.
Cabaran dan Trend Masa Depan
1. Cabaran
Walaupun terdapat kemajuan yang ketara dalam teknologi perancangan laluan dinamik, cabaran kekal dalam aplikasi industri AGV:
- Keperluan masa nyata: Terutama dalam operasi berkelajuan tinggi atau senario trafik yang padat, algoritma perlu melengkapkan pengiraan dalam milisaat.
- Ketidakpastian alam sekitar: Bunyi sensor, ralat kedudukan dan kesukaran dalam meramalkan halangan dinamik.
- Penyelarasan berbilang AGV: Elakkan konflik dan kebuntuan untuk mencapai kerjasama yang cekap.
- Kekangan kinematik yang kompleks: Mengambil kira saiz AGV, jejari pusingan dan prestasi pecutan/nyahpecutan.
2. Trend Masa Depan
Pada masa hadapan, perancangan laluan dinamik akan berkembang ke arah penyelesaian yang lebih bijak dan cekap:
- Penyepaduan pembelajaran mesin: Menggunakan pembelajaran pengukuhan, pembelajaran tiruan dan kaedah lain untuk membolehkan AGV mempelajari strategi navigasi optimum secara autonomi.
- Perancangan Ramalan: Ramalkan niat dan trajektori halangan dinamik lain (seperti pejalan kaki dan kenderaan) untuk merancang lebih awal.
- Pemahaman Semantik: Membolehkan AGV memahami maklumat semantik dalam persekitaran (seperti 'jalan kaki' dan 'zon pengecasan') untuk membuat keputusan yang lebih sesuai dengan senario.
- Kerjasama Manusia-Mesin: Mencapai interaksi dan pengelakan yang lebih selamat dan semula jadi dalam persekitaran kewujudan bersama manusia-mesin.
Kesimpulan
Dijkstra, A, RRT, dan varian dinamiknya ialah alat teras dalam perpustakaan algoritma perancangan laluan dinamik AGV. Ia berfungsi sebagai 'mata pintar' dan 'roda stereng dinamik' AGV, membolehkannya mengemudi persekitaran yang kompleks dengan fleksibiliti dan kecekapan. Memahami prinsip dan ciri algoritma ini adalah penting untuk memajukan teknologi AGV dan bidang automasi yang lebih luas. Apabila algoritma berkembang dan kuasa pengiraan bertambah baik, AGV akan datang sudah pasti akan menjadi lebih pintar, lebih dipercayai dan lebih cekap.
AiTEN Robotics , yang beribu pejabat di Suzhou, China, ialah peneraju global dalam kenderaan industri autonomi (AMR/AGV) dan penyelesaian automasi logistik. AiTEN Robotics telah membangunkan sepuluh siri produk untuk memenuhi keperluan senario pengendalian bahan tindanan penuh. AiTEN Robotics telah menggunakan lebih daripada 200 projek di lebih 30 negara dan wilayah, dan dipercayai oleh banyak syarikat Fortune 500 merentas industri seperti automotif, makanan dan minuman, bahan kimia, farmaseutikal, pembuatan dan logistik pihak ketiga, meningkatkan keselamatan operasi, kecekapan dan kesediaan masa hadapan.

