








Bagaimanakah Forklift AGV Melaksanakan Perancangan Laluan?
_%E7%94%BB%E6%9D%BF%201.avif)
Dalam bidang logistik moden dan automasi industri, kenderaan berpandu automatik (AGV) telah menjadi teknologi teras. Kenderaan navigasi autonomi ini memainkan peranan penting dalam memudahkan proses pengendalian bahan, meningkatkan kecekapan dan mengurangkan kesilapan manusia. Mereka mampu menyelesaikan tugas pengendalian bahan tanpa campur tangan manusia, dan salah satu teknologi utama di sebalik ini ialah perancangan laluan. Jadi, bagaimanakah forklift AGV mencapai perancangan laluan?
Apakah Perancangan Laluan AGV?
Secara ringkas, perancangan laluan melibatkan mencari laluan optimum atau bebas perlanggaran untuk AGV bergerak dari titik permulaannya (titik A) ke destinasinya (titik B) dalam persekitaran kerja yang mengandungi halangan (rak, stesen kerja, AGV lain). Perancangan laluan yang berkesan memastikan AGV boleh beroperasi secara harmoni dengan persekitaran mereka, memaksimumkan daya pengeluaran dan meminimumkan masa henti.
Kepentingannya adalah jelas:
- Kecekapan yang dipertingkatkan: Laluan optimum bermakna masa kerja yang lebih pendek dan daya pemprosesan yang lebih tinggi.
- Keselamatan yang terjamin: Mengelakkan perlanggaran antara AGV, antara AGV dengan orang atau peralatan, dan memastikan keselamatan orang, mesin dan barang.
- Pengurangan kos: Kurangkan perbatuan yang tidak perlu, jimat tenaga dan lanjutkan hayat peralatan.
- Penyelarasan sistem: Benarkan berbilang AGV bekerja bersama secara keseluruhan untuk memastikan kelancaran keseluruhan sistem.
Kaedah Utama Perancangan Laluan AGV
Perancangan laluan bukan proses satu langkah; ia biasanya merupakan proses membuat keputusan yang dinamik dan berbilang lapisan.
1. Perancangan laluan landasan tetap
Jalur magnetik, kod QR atau trek elektromagnet digunakan untuk navigasi.
Kelebihan: Stabil dan boleh dipercayai, sesuai untuk kilang dan gudang dengan susun atur tetap.
Kelemahan: Kurang fleksibiliti; trek mesti diletakkan semula apabila menukar laluan.
2. Perancangan laluan navigasi berasaskan peta
Dengan bantuan teknologi seperti LiDAR dan visual SLAM, AGV boleh membina peta persekitaran mereka dan mengesan diri mereka dalam masa nyata.
Kelebihan: Fleksibiliti tinggi, boleh disesuaikan dengan persekitaran dinamik dan mampu navigasi tanpa jejak.
Kelemahan: Keperluan tinggi untuk kuasa pengkomputeran dan ketepatan sensor, dan kos yang agak tinggi.
3. Perancangan Laluan Global
Ini ialah reka bentuk peringkat atas yang dilakukan sebelum tugasan bermula. Sistem mengira laluan optimum teori untuk AGV berdasarkan peta global statik yang diketahui (termasuk semua kawasan halangan tetap). Merentasi keseluruhan peta kilang atau gudang, sistem AGV pra-mengira laluan optimum global dari titik permulaan ke titik akhir.
Algoritma biasa: Algoritma A-Star, algoritma Dijkstra, Algoritma Random Tree (RRT) Berkembang Pantas
Ciri-ciri: Perancangan laluan optimum, sesuai untuk peruntukan tugas berskala besar.
4. Perancangan Laluan Tempatan
Pelarasan masa nyata dibuat semasa operasi untuk mengelakkan halangan secara tiba-tiba atau gangguan dinamik.
Dalam operasi sebenar, halangan dinamik yang tidak terdapat dalam peta global pasti akan dihadapi, seperti pekerja yang tiba-tiba muncul, palet diletakkan buat sementara waktu atau AGV bergerak yang lain. Dalam kes sedemikian, perancangan tempatan diperlukan.
Kaedah biasa: kaedah medan potensi buatan, kaedah tetingkap dinamik.
Ciri: meningkatkan keselamatan dan kebolehsuaian, tetapi laluannya mungkin tidak optimum secara global.
Langkah-langkah Pelaksanaan untuk Perancangan Laluan AGV
Proses perancangan laluan yang lengkap biasanya menggabungkan perancangan global dan tempatan, dengan langkah khusus berikut:
1. Analisis keperluan: WMS/MES mengeluarkan tugas, menentukan titik permulaan, titik akhir, kapasiti beban, dsb.
2. Pemodelan persekitaran: Menggunakan teknologi SLAM untuk membina peta dua dimensi atau tiga dimensi bagi persekitaran kerja, dan menandakan titik penting seperti zon halangan, zon boleh dipandu, stesen pengecasan dan meja kerja pada peta.
3. Pengiraan Laluan Global: Sistem penjadualan menggunakan algoritma untuk mengira laluan optimum secara teorinya untuk AGV pada peta.
4. Pengurusan Trafik: Sistem menyemak sama ada laluan bercanggah dengan laluan yang dirancang AGV lain. Jika perlu, ia menyelaras (cth, meminta AGV menunggu sebentar di nod) atau merancang semula laluan.
5. Pengagihan Laluan: Laluan yang dirancang diagihkan kepada AGV.
6. Pengelakan Halangan Masa Nyata Tempatan: AGV bergerak di sepanjang laluan sementara penderia mengimbas persekitaran secara berterusan. Setelah mengesan halangan, ia serta-merta melakukan pengelakan halangan atau penghalaan semula.
7. Pelaksanaan Tugasan dan Maklum Balas: AGV mencapai titik sasaran, menyelesaikan tugasan dan memberi suapan kembali statusnya kepada sistem.
Apakah Faktor yang Mempengaruhi Perancangan Laluan?
- Kerumitan persekitaran: Rak gudang, lebar lorong dan lokasi titik pengambilan forklift semuanya mempengaruhi laluan.
- Penjadualan tugas: Apabila berbilang AGV beroperasi secara serentak, kesesakan mesti dielakkan.
- Keselamatan: Di kawasan di mana manusia dan mesin bekerja bersama, keselamatan mesti diberi keutamaan tertinggi untuk memastikan operasi yang selamat dalam persekitaran kewujudan bersama manusia-mesin.
- Pengoptimuman kecekapan: Minimumkan kadar larian kosong dan penggunaan tenaga untuk meningkatkan kecekapan logistik keseluruhan.
Kes Permohonan
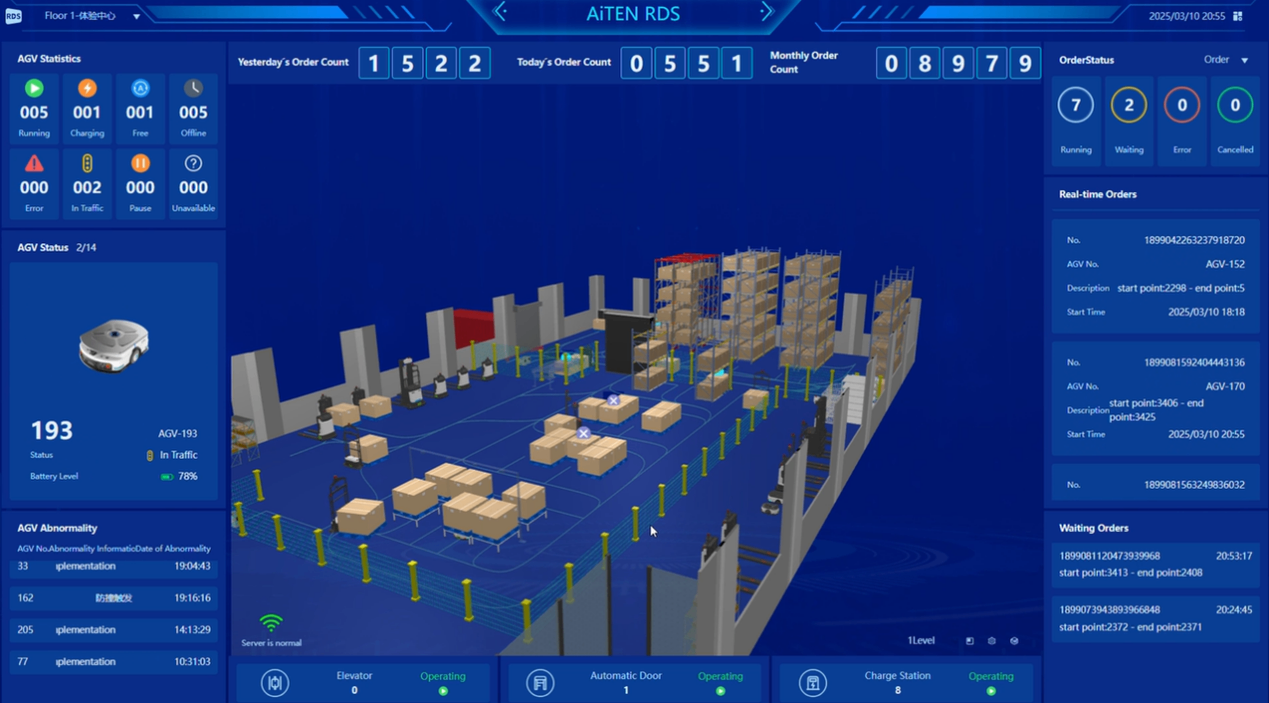
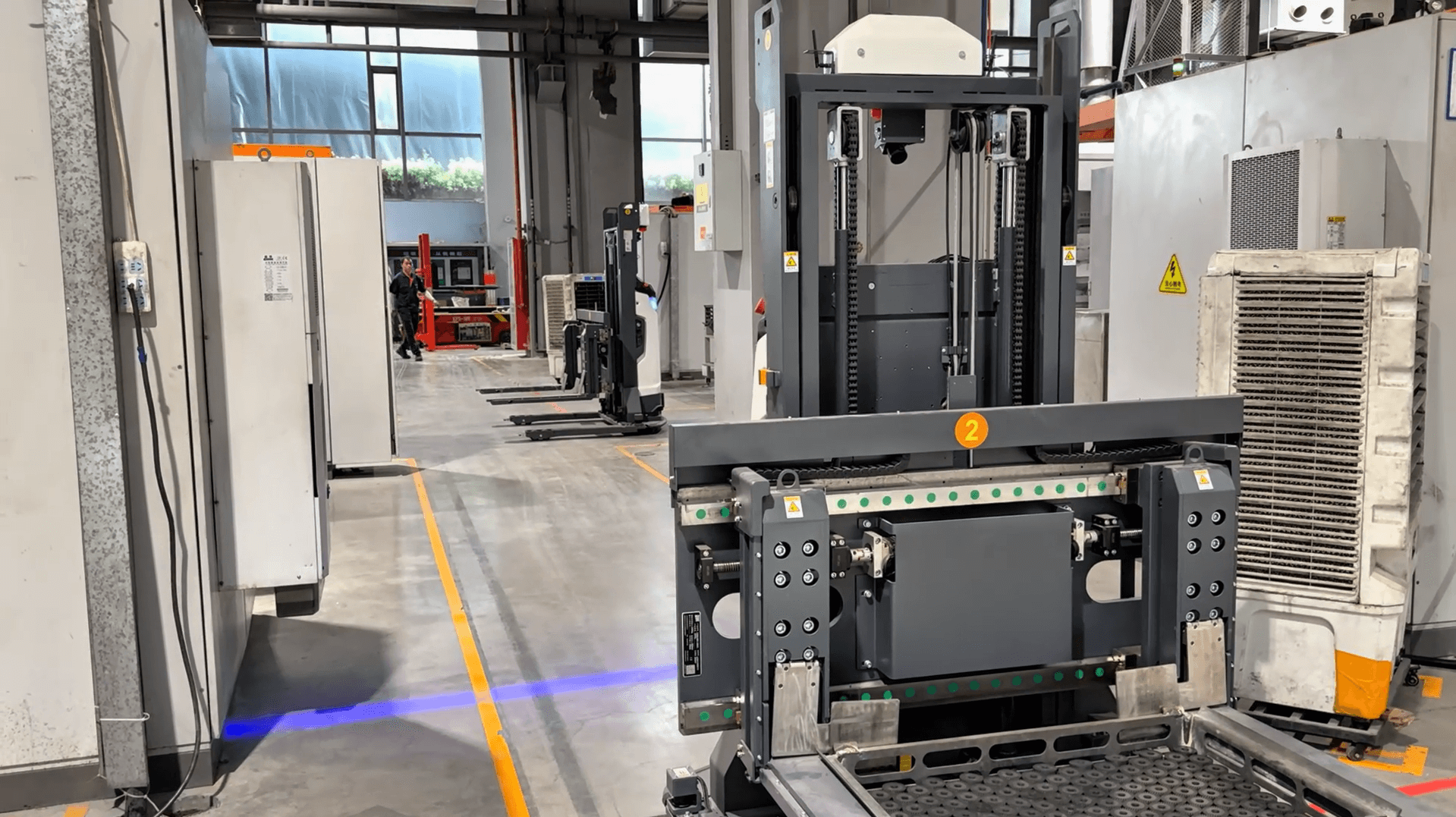
Teknologi perancangan laluan AGV mempunyai pelbagai aplikasi. Contohnya, forklift tanpa pemandu AiTEN Robotics menggunakan navigasi SLAM laser dan algoritma pintar AI untuk mencapai pengangkutan yang fleksibel dalam senario seperti bahagian automotif dan pemprosesan makanan . Sistem ini bukan sahaja boleh memilih laluan optimum secara automatik, tetapi juga melakukan pengelakan pintar dan pengoptimuman laluan apabila berbilang kenderaan sedang beroperasi, meningkatkan kecekapan gudang dan pengeluaran dengan ketara.
Dalam kilang pembuatan, AGV biasanya digunakan untuk mengangkut bahan mentah, kerja dalam proses dan barang siap antara stesen kerja yang berbeza. Dengan menggunakan algoritma perancangan laluan lanjutan, AGV boleh menavigasi susun atur kilang yang kompleks, mengelakkan halangan dan AGV lain serta menghantar bahan dan produk dengan segera dan cekap.
Dalam industri logistik dan pergudangan, AGV memainkan peranan penting dalam pengurusan inventori, pemenuhan pesanan dan pengangkutan. AGV boleh diprogramkan untuk menavigasi, mengambil dan mengangkut palet kargo di dalam gudang, dan juga memuat dan memunggah barang. Dengan mengoptimumkan perancangan laluan, AGV boleh bergerak dengan cekap di dalam gudang, mengurangkan perjalanan yang tidak perlu dan meningkatkan kelajuan pemprosesan pesanan.
Kesimpulan
Perancangan laluan untuk AGV ialah komponen teras automasi logistik, daripada trajektori tetap kepada navigasi pintar, dan daripada perancangan global kepada pengelakan halangan masa nyata. Pilihan teknologi yang berbeza menentukan senario terpakai dan tahap kecekapan sistem. Dengan pembangunan berterusan teknologi kecerdasan buatan dan penderia, perancangan laluan AGV akan menjadi semakin pintar, menyediakan asas yang kukuh untuk naik taraf automasi kilang dan gudang.
Memilih penyelesaian perancangan laluan yang sesuai memerlukan pertimbangan menyeluruh tentang keperluan fleksibiliti senario perniagaan, kerumitan alam sekitar dan belanjawan pelaburan. Memahami prinsip asas akan membantu perusahaan mereka bentuk dan melaksanakan sistem AGV dengan lebih baik, benar-benar membuka potensi logistik pintar.
Mengenai AiTEN Robotics
Sebagai sebuah syarikat yang mengkhusus dalam penyelesaian logistik pintar, AiTEN Robotics secara konsisten memfokuskan pada senario 'kilang pintar', menyepadukan inovasi teknologi secara mendalam dengan keperluan industri. Ia telah menyediakan perkhidmatan yang komprehensif kepada lebih 200 pelanggan pembuatan di seluruh dunia: Memanfaatkan rangkaian penuh portfolio produk robot pengendalian bahan untuk merangkumi pelbagai senario pengendalian bahan, kami telah membangunkan sistem penjadualan pintar gred industri untuk membolehkan kerjasama yang cekap antara pelbagai peranti. Melalui sistem perkhidmatan kitaran hayat yang komprehensif merangkumi perancangan pra-jualan, penggunaan dan pelaksanaan kepada pengoptimuman operasi, kami memperkasakan perusahaan untuk mencapai transformasi kecerdasan logistik, memacu secara berterusan peningkatan digital dan pembangunan berkualiti tinggi industri pembuatan.
Hubungi kami untuk meneroka penyelesaian automasi untuk kilang anda.

