








Analisis Teknologi Perancangan Laluan Pilih-dan-Tempat Pengendalian Pallet AGV
_%E7%94%BB%E6%9D%BF%201.avif)
.avif)
Pemilihan dan peletakan palet tepat AGV bergantung pada teknologi perancangan laluan termaju. Tugas itu bukan sahaja memerlukan laluan bebas perlanggaran, tetapi juga postur berketepatan tinggi dan trajektori lancar apabila menghampiri palet. Artikel ini menganalisis teknologi teras untuk mencapai matlamat ini, seperti aplikasi terkoordinasi lengkung Hibrid A dan Bézier.
Mengapa Pengendalian Pallet Memerlukan Perancangan Laluan Khas?
Cabaran:
- Ketepatan tinggi pada penghujung: Garpu mesti diselaraskan dengan lubang garpu palet dengan ketepatan sentimeter/milimeter dan memenuhi keperluan orientasi tempat letak kereta yang ketat.
- Kekangan pergerakan yang kuat: Pematuhan ketat kepada dimensi AGV, jejari pusingan minimum dan kekangan tidak lengkap (tiada pergerakan sisi) diperlukan, terutamanya dalam ruang sempit.
- Kelancaran laluan: Elakkan pecutan, nyahpecutan atau pusingan mengejut untuk memastikan kestabilan kargo dan keselamatan operasi.
- Pengelakan Halangan Ketepatan Hampir Akhir: Penderiaan ketepatan tinggi diperlukan apabila menghampiri palet untuk menangani halangan yang tidak diketahui atau ralat kedudukan.
Analisis Teknikal
1. Perancangan laluan global
Teknologi: Dijkstra, standard A*
Fungsi: Menjana laluan umum (bersambung, kos rendah) dengan pantas dari titik permulaan ke kawasan dulang pada peta grid global.
Ciri-ciri: Kelajuan pantas, mengabaikan butiran kinematik.
2. Perancangan Laluan Halus Titik Akhir
Teknologi Teras: Hibrid A**
Kelebihan: Carian dalam ruang keadaan berterusan (x, y, θ) dan secara langsung membenamkan model kinematik kenderaan (seperti model basikal).
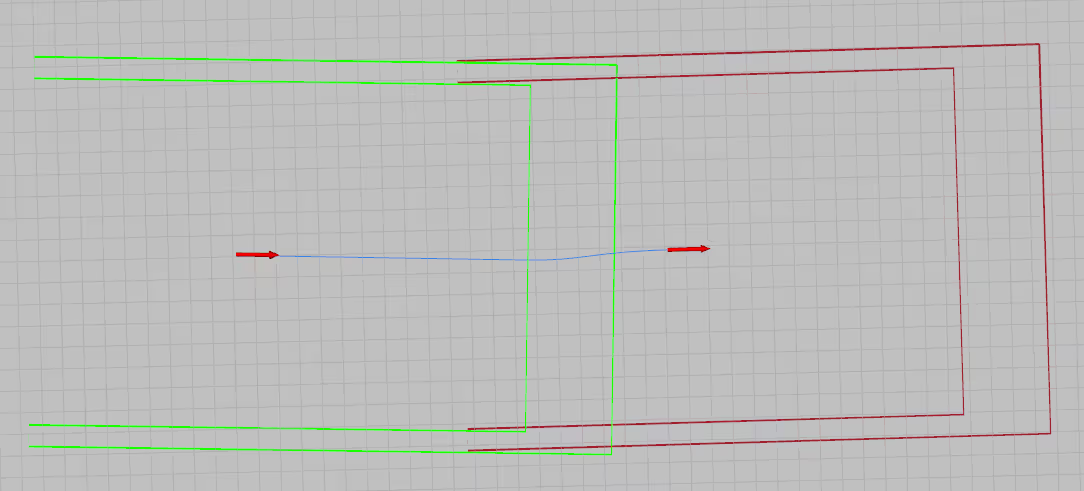
Kesan: Menghasilkan laluan yang boleh dilaksanakan yang mencapai postur sasaran yang tepat (x, y, θ) dan mematuhi kekangan seperti jejari pusingan, menyelesaikan isu pusingan kompleks dalam 'meter terakhir'.
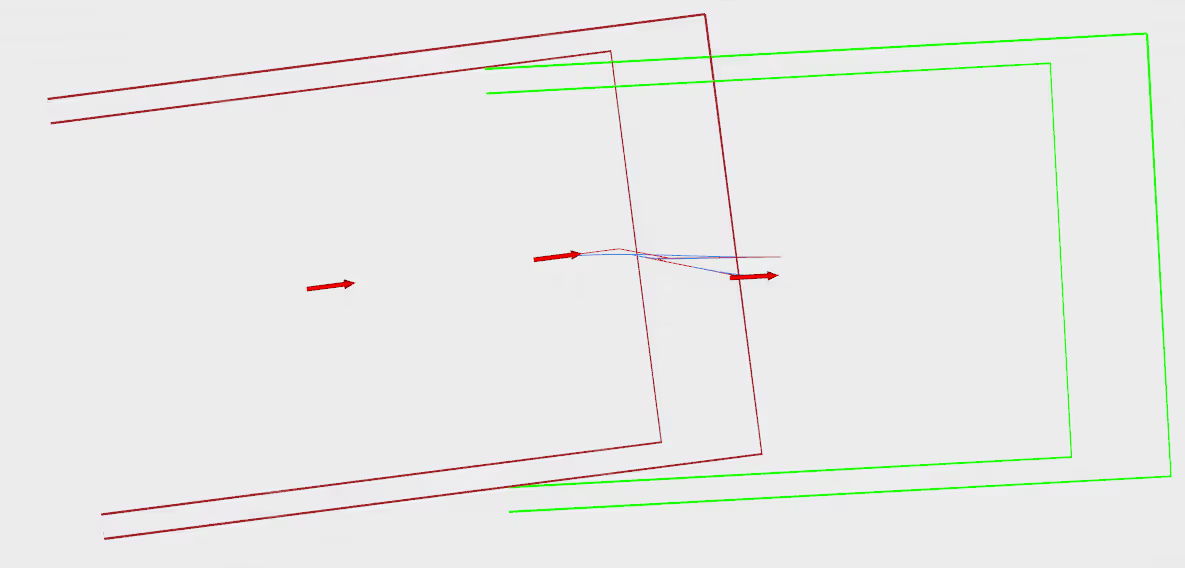
3. Pelicinan dan pengoptimuman laluan
Teknologi teras: Lengkung Bézier
Kelebihan: Menjana lengkung lancar dan berterusan melalui titik kawalan, memastikan kedudukan mula/akhir dan arah (tangen) boleh dikawal.
Aplikasi: Melicinkan laluan yang dihasilkan oleh carian (selalunya mengandungi sudut), memastikan kelengkungan berterusan; menghubungkan segmen laluan; menjana trajektori kelajuan berterusan.
Teknologi alternatif: B-splines, NURBS.
4. Pengelakan halangan masa nyata dan pelarasan laluan
Teknologi: Algoritma Tetingkap Dinamik (DWA), Jalur Anjal Masa (TEB), Perancangan Semula Pantas.
Fungsi: Berdasarkan data penderia, laraskan laluan/kelajuan setempat untuk mengelakkan halangan dinamik sambil kekal sedekat mungkin dengan laluan asal yang dioptimumkan.
Konvergensi Teknologi
Proses perancangan laluan memilih dan meletakkan palet AGV mungkin seperti berikut.
1. Perancangan global (A*): Rancang laluan kasar dari titik permulaan ke sekitar kawasan palet pada peta grid.
2. Suis Perancangan Terminal: Cetuskan perancangan terperinci apabila AGV menghampiri kawasan palet.
3. Docking Tepat (Hibrid A*): Rancang laluan yang mematuhi kinematik ke pose sasaran (x, y, θ).
4. Pelicinan Laluan (Bezier/Spline): Ratakan laluan yang dijahit untuk menjana laluan akhir berterusan secara geometri.
5. Penjanaan trajektori: Hasilkan trajektori dengan kekangan halaju/pecutan berdasarkan laluan terlicin untuk pengawal untuk melaksanakan.
6. Pengelakan halangan masa nyata: Pantau keseluruhan proses dan laraskan laluan/kelajuan secara dinamik untuk mengelakkan halangan.
Cabaran
Walaupun teknologi sedia ada sudah boleh menyelesaikan masalah pemilihan dan meletakkan palet AGV pada tahap tertentu, masih terdapat cabaran dan peluang yang berterusan untuk pembangunan:
- Mengimbangi kecekapan dan ketepatan: Perancangan yang lebih terperinci selalunya bermakna kos pengkomputeran yang lebih tinggi. Bagaimana untuk meningkatkan kelajuan perancangan sambil memastikan ketepatan adalah kawasan untuk pengoptimuman berterusan.
- Kebolehsuaian kepada persekitaran dinamik: Cara mengendalikan halangan bergerak, menukar kedudukan palet atau postur dengan lebih teguh.
- Gabungan sensor dan ketepatan kedudukan: Pelaksanaan laluan berketepatan tinggi bergantung pada kedudukan masa nyata berketepatan tinggi dan persepsi alam sekitar.
- Operasi kerjasama berbilang AGV: Di kawasan pemilihan dan penempatan yang padat penduduk, cara menyelaraskan berbilang AGV untuk operasi dengan cekap dan selamat.
- Kaedah berasaskan pembelajaran: Meneroka penggunaan pembelajaran pengukuhan dan kaedah lain untuk membolehkan AGV belajar secara autonomi memilih dan meletakkan strategi dan laluan.
Kesimpulan
Memilih dan meletakkan palet yang tepat oleh AGV adalah tugas yang kompleks dan tepat dalam bidang automasi. Ia tidak bergantung pada satu teknologi 'peluru perak', tetapi lebih kepada gabungan pintar dan penyelarasan pelbagai perancangan laluan dan teknologi pengoptimuman.
Daripada panduan laluan global kepada perancangan titik akhir berasaskan persepsi kinematik yang didayakan oleh Hibrid A*, dan trajektori lancar yang dicapai melalui teknik seperti lengkung Bézier, teknologi ini secara kolektif mencatatkan 'laluan pintar' untuk AGV beroperasi dengan selamat, tepat dan cekap, menyuntik momentum berkuasa ke dalam logistik dan pengeluaran automatik moden. Memandangkan teknologi terus berkembang, kami mempunyai sebab untuk mempercayai bahawa AGV masa depan akan menunjukkan kecerdasan dan fleksibiliti yang lebih besar dalam operasi pengendalian palet.
AiTEN Robotics , yang beribu pejabat di Suzhou, China, ialah peneraju global dalam kenderaan industri autonomi (AMR/AGV) dan penyelesaian automasi logistik. AiTEN Robotics telah membangunkan sepuluh siri produk untuk memenuhi keperluan senario pengendalian bahan tindanan penuh. AiTEN Robotics telah menggunakan lebih daripada 200 projek di lebih 30 negara dan wilayah, dan dipercayai oleh banyak syarikat Fortune 500 merentas industri seperti automotif, makanan dan minuman, bahan kimia, farmaseutikal, pembuatan dan logistik pihak ketiga, meningkatkan keselamatan operasi, kecekapan dan kesediaan masa hadapan.

