








Robot Pengendalian AGV Lazimnya Menggunakan Prinsip Penderia dan Kelebihan dan Kelemahannya, Pengenalan Aplikasi
_%E7%94%BB%E6%9D%BF%201.avif)

Ⅰ. LiDAR
(1) Ketahui cara LiDAR mengunci sasaran berkelajuan tinggi dalam masa nyata!
LiDAR ialah sistem sensor yang mengesan maklumat sasaran dengan memancarkan pancaran laser. Prinsip terasnya ialah: memancarkan laser ke sasaran dan menerima isyarat yang dipantulkan, tentukan jarak sasaran dengan mengira masa pergi balik laser; pada masa yang sama, peranti berputar pada kelajuan tinggi untuk pengimbasan 360 darjah, mengumpul data awan titik padat (kumpulan koordinat pada permukaan objek), dan membina model digital 2D/3D persekitaran dalam masa nyata. Sistem ini boleh mengukur dengan tepat kedudukan, kelajuan, bentuk dan banyak lagi parameter sasaran, dan digunakan secara meluas dalam bidang pemanduan autonomi, pemetaan dan sebagainya.
1. Data awan titik ialah koleksi semua titik permukaan objek yang dikesan oleh LiDAR dalam julat pengimbasan. Setiap titik mengandungi dua jenis maklumat teras:
① Ciri pemantulan
Julat nilai: 0-255
Objek pemantulan meresap: 0-150 (bersamaan dengan pemantulan 0%-100%)
Objek pemantul: 151-255 (cth logam, kaca)
Note: When the object is <2m away from the Mid-360 radar, the reflectivity error is large, and only the total reflection/diffuse reflection type can be judged.
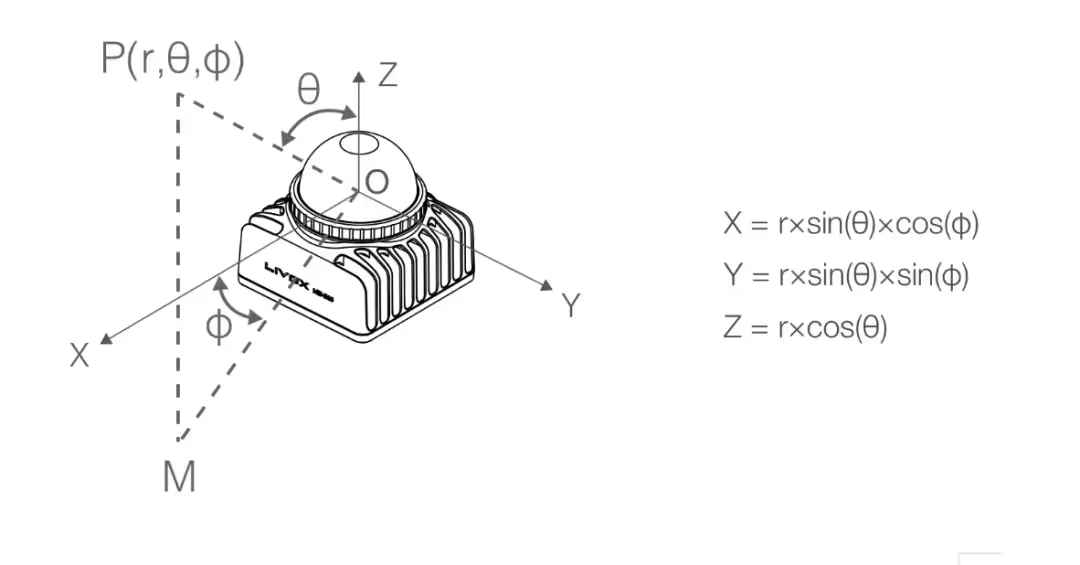
② Koordinat ruang
Jenis sistem koordinat: Koordinat Cartesan (x,y,z) atau koordinat sfera (r,θ,φ).
Apabila pengesanan berkesan: Keluarkan nilai koordinat sebenar.
Apabila pengesanan tidak sah (tiada objek/jarak lebih > 100m):
Koordinat Cartesan: (0,0,0)
Koordinat sfera: (0,θ,φ) (kekalkan maklumat sudut imbasan semasa)
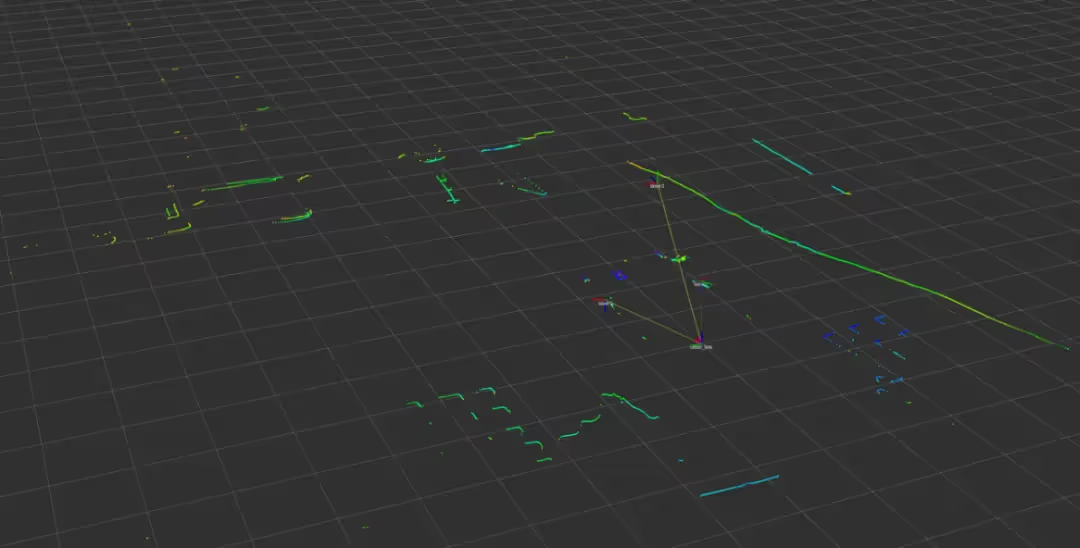
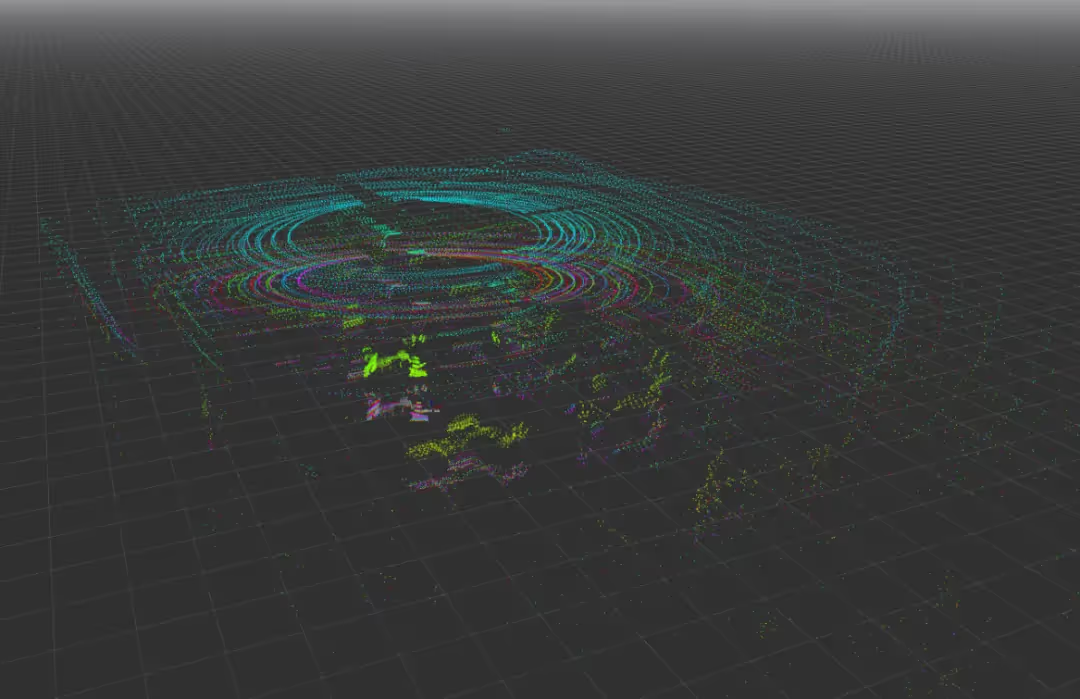
2. LiDAR boleh dibahagikan kepada LiDAR satu talian dan LiDAR berbilang talian mengikut klasifikasi bilangan baris. Satu talian LiDAR merujuk kepada sumber laser yang dikeluarkan oleh rasuk adalah satu baris radar, akses kepada peta imbasan planar 2D; LiDAR berbilang talian merujuk kepada pelepasan serentak dan penerimaan rasuk berbilang radar berputar laser, pasaran pada masa ini 4 baris, 8 baris, 16 baris, 32 baris, 64 baris, dan 128 baris mata. LiDAR berbilang talian boleh mengecam maklumat ketinggian objek dan mendapatkan imbasan 3D persekitaran sekeliling. Visualisasi awan titik 2D dan 3D ditunjukkan dalam rajah.
(2) Mengapakah navigasi sentiasa meneka ke arah mana anda mahu pergi?
Navigasi laser ialah kaedah navigasi yang biasa digunakan dalam sistem AGV. Mengikut prinsip navigasinya, AGV boleh berjalan dengan bebas di kawasan navigasi dan mengesan dengan tepat; dalam julat navigasi, laluan perjalanan kenderaan boleh ditukar pada bila-bila masa mengikut keperluan sebenar, yang boleh memberikan permainan penuh kepada fleksibiliti AGV dan meningkatkan kecekapan pengeluaran. Banyak sistem perlu dijalankan di bawah keadaan tapak sedia ada, yang amat sesuai untuk sistem AGV navigasi laser.
1. Prinsip teras navigasi laser boleh diringkaskan dalam dua prinsip utama:
① Pembinaan peta (mempelajari alam sekitar untuk kali pertama)
Apabila AGV dimulakan buat kali pertama, ia mengimbas persekitarannya dari semua sisi dengan LiDAR, sama seperti 'mengimbas bilik dengan penuding laser'.
Menggunakan teknologi SLAM (Autonomous Localization + Mapping), ia merekodkan kedudukan objek tetap seperti dinding dan peralatan untuk mencipta peta digital persekitaran.
②Penempatan masa nyata (pencarian kedudukan semasa menavigasi)
Semasa AGV bergerak, LiDAR sentiasa mengimbas dan memperoleh awan titik 'snapshot' persekitaran sekeliling dalam masa nyata.
Data masa nyata dibandingkan dengan peta yang disimpan (serupa dengan 'Cari Permainan Perbezaan'), dan algoritma mengira kedudukan dan orientasi tepat semasa AGV.

2. Ciri navigasi laser:
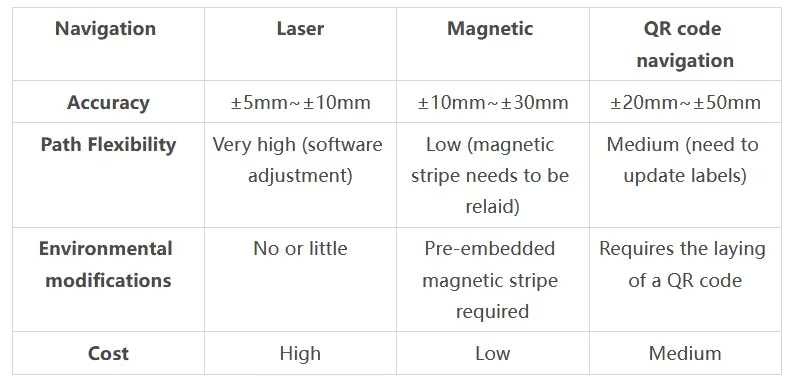
Kedudukan dan navigasi berketepatan tinggi, sesuai untuk adegan dengan keperluan yang ketat untuk ketepatan, seperti menyusun barang pilih dan letak; kebolehsuaian alam sekitar yang kuat, adegan kompleks mempunyai keserasian tertentu, boleh mengatasi perubahan dalam pencahayaan, sedikit ketidaksamaan tanah dan gangguan lain, tetapi perlu mengelakkan cahaya kuat secara langsung pada LiDAR, yang boleh menjejaskan ketepatan julat; tiada had laluan tetap, tidak seperti panduan magnet atau navigasi kod dua dimensi, navigasi laser tidak perlu menjadi jalur magnet pra-benam atau meletakkan label, melalui perisian boleh pengubahsuaian percuma laluan; kecerdasan tinggi dan skalabiliti, kerjasama pelbagai kenderaan, melalui sistem penjadualan pusat untuk berkongsi peta dan maklumat kedudukan masa nyata, untuk mencapai operasi koperasi berbilang AGV, seperti pengelakan lintasan, peruntukan tugas.
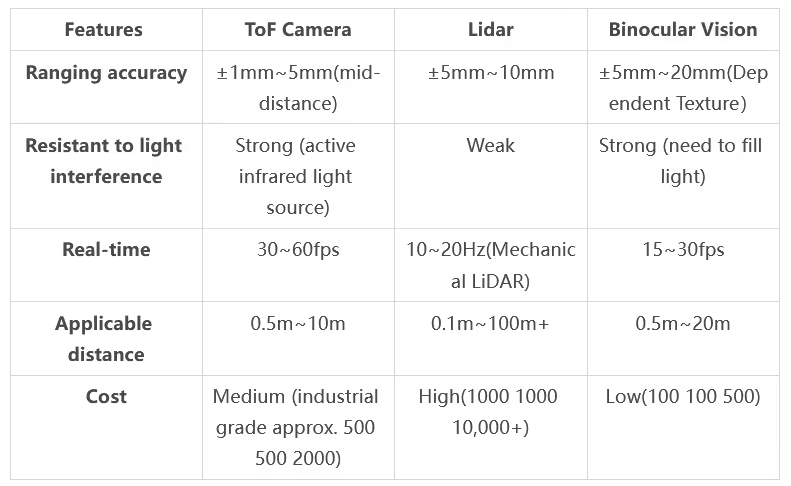
Bandingkan dengan kaedah navigasi lain seperti yang ditunjukkan dalam jadual:
(3) Bagaimanakah refleks terkondisi AI untuk mengelakkan halangan dalam beberapa saat dibuat?
1. Prinsip Mengelak Halangan Laser
Melalui pengimbasan masa nyata radar laser untuk menjana data awan titik alam sekitar, algoritma pintar pertama akan menjadi awan titik bersebelahan yang diagregatkan ke dalam kelompok halangan, membezakan antara objek statik (kedudukan tidak berubah) dan objek dinamik (perubahan kedudukan, trajektori boleh diramal); pada masa yang sama, digabungkan dengan pengimbasan serentak pelbagai data radar, analisis berpusatkan badan bersatu persekitaran sekeliling, badan semua awan titik di luar kereta ditandakan sebagai halangan, perancangan masa nyata laluan selamat untuk mengelakkan bahaya.
2. Jenis mengelakkan halangan
LiDAR talian tunggal (cth siri SICK TIM): kos rendah, digunakan untuk mengelakkan halangan 2D planar.
LiDAR berbilang talian (cth Livox Mid360, Velodyne VLP-16): Pengelakan halangan 3D, mengesan maklumat ketinggian spatial untuk mengelakkan objek rendah atau tergantung.
3. Lokasi pemasangan radar pengelakan halangan
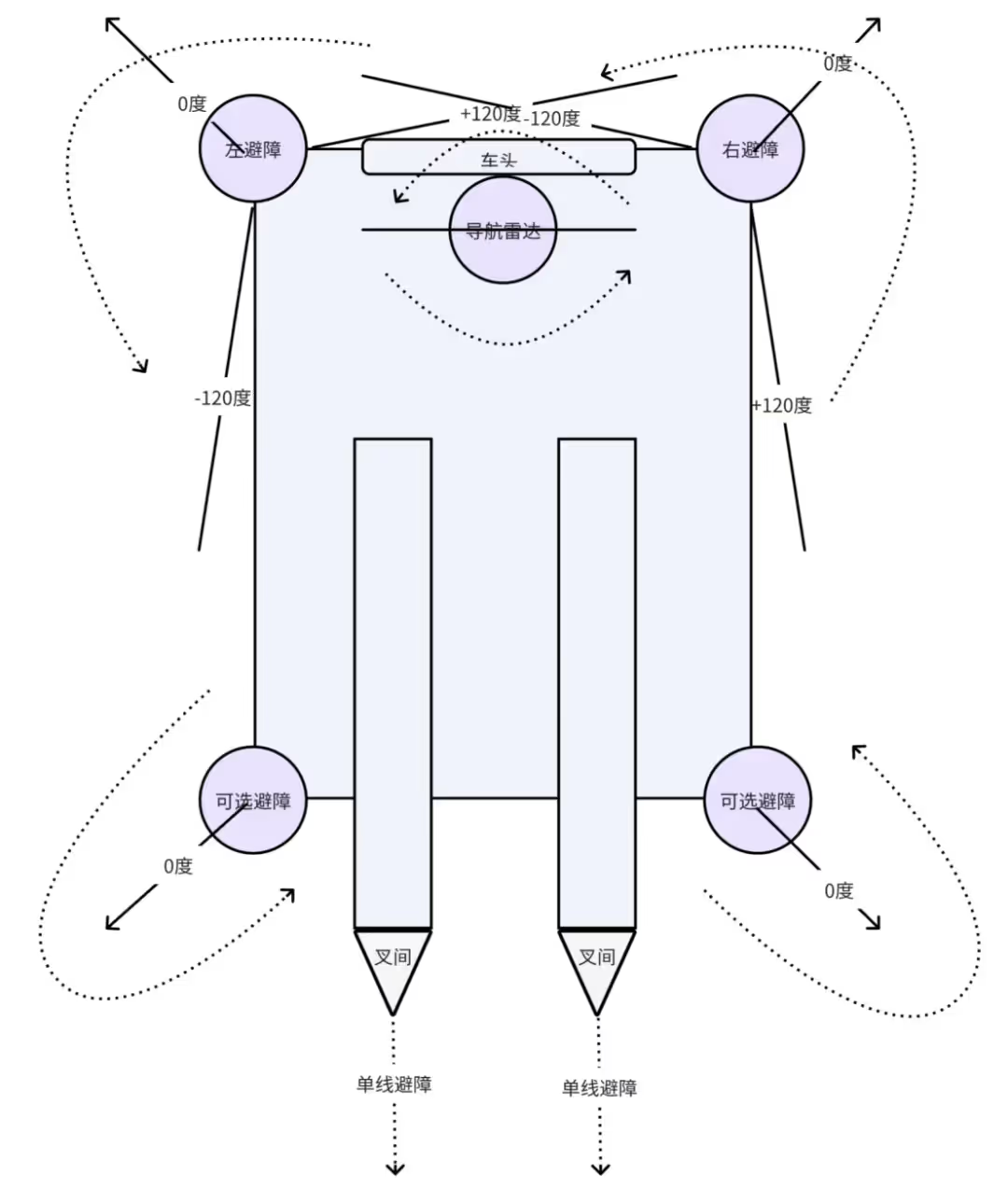
Terutamanya untuk mengelakkan halangan utama depan/belakang, perlindungan sisi pada kedua-dua belah badan, dan pemantauan global teratas, seperti yang ditunjukkan dalam rajah. Bahagian hadapan dan belakang kenderaan biasanya dipasang pada empat penjuru badan kenderaan, dan radar dicondongkan ke luar di hadapan radar. Perlindungan sisi pada kedua-dua belah badan biasanya dilindungi oleh julat pengimbasan radar pada empat penjuru. Sistem pemantauan global teratas biasanya menggunakan radar navigasi untuk mengelakkan halangan pada masa yang sama.
Dengan radar terus di hadapan sebagai 0 darjah, julat untuk menutup tepi badan adalah tambah atau tolak 135 darjah, tetapi disebabkan gangguan badan, adalah perlu untuk menapis bahagian yang dekat dengan badan, jadi julat FOV biasanya ditetapkan kepada tambah atau tolak 120 darjah. Antara garpu secara amnya hanya mengesan garis tunggal tanpa mengelakkan halangan sudut.
4. Pengelakan halangan keliling ruang 360 darjah
Perlu ke lokasi pemasangan radar 2D dan 3D untuk memastikan julat pengimbasan liputan keseluruhan badan di sekeliling bulatan.
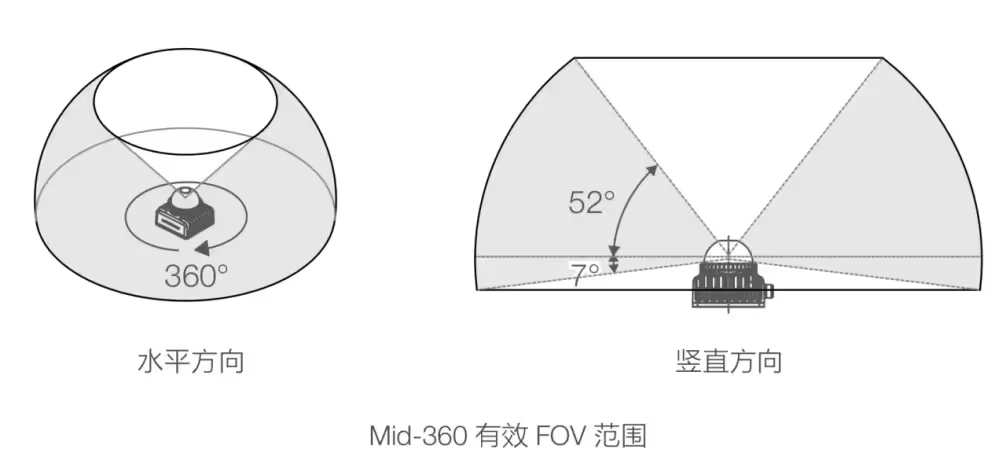
Radar 3D hingga mid360 misalnya, perlu mengetahui definisi koordinatnya dan liputan maksimum julat imbasan, seperti yang ditunjukkan dalam rajah.
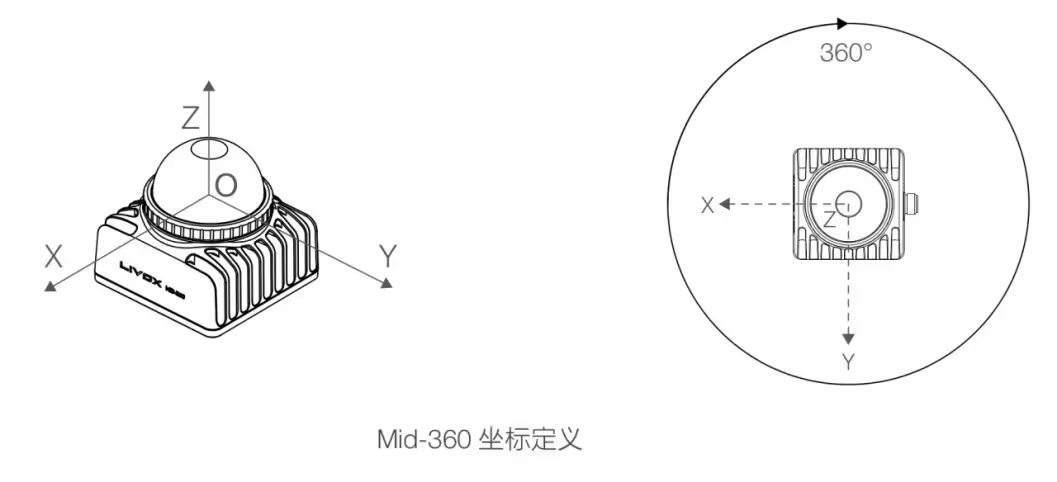
Skim lalai ialah: satu radar 3d dipasang secara menegak atau condong ke atas di bawah radar navigasi hadapan, satu radar 3d dipasang secara menegak atau condong ke atas pada kedua-dua belah badan, satu radar 3d dipasang secara menegak atau condong ke atas di bawah garpu di bahagian belakang badan, dan optoelektronik elakkan di antara Obstax.
5. Kelebihan dan had teknikal
Kelebihan: Ketepatan tinggi: ketepatan julat peringkat milimeter, jauh lebih tinggi daripada ultrasonik atau inframerah. Anti-gangguan: tidak terjejas oleh cahaya ambien, habuk, medan elektromagnet (berbanding dengan penderia penglihatan). Respons pantas: kekerapan pengimbasan biasanya 10Hz~50Hz, sesuai untuk AGV berkelajuan tinggi (≥1.5m/s).
(4) Navigasi laser dalam mengendalikan robot
1. Gambaran keseluruhan prinsip persepsi laser:
Selepas memperoleh data awan titik melalui radar 3D, ia mula-mula menapis maklumat gangguan seperti pantulan habuk dan kaca, dan kemudian mengekstrak ciri-ciri struktur utama seperti tepi rak, sudut dinding dan lubang garpu palet dengan algoritma pintar, dan akhirnya memetakan objek sasaran dengan tepat ke dalam sistem koordinat, menghasilkan maklumat kedudukan dan gerak isyarat, jadi maklumat persepsi dan konstruk peta setempat dengan tepat. 'melihat objek dan memahami adegan'. 'Persepsi pintar.
2. Pengenalan dan kedudukan palet
3. Penjajaran garpu

4. Susun Auto

5. Kelebihan dan had teknikal
Kelebihan: Ketepatan tinggi: Ketepatan julat laser boleh mencapai ±1mm, memenuhi keperluan operasi palet gred industri. Tahan kepada gangguan cahaya ambien: Berbanding dengan penyelesaian penglihatan, laser tidak terjejas oleh perubahan cahaya. Masa nyata yang kuat: kekerapan pengimbasan 10Hz~50Hz, sesuai untuk senario logistik berkelajuan tinggi.
Had: Kos tinggi: Harga LiDAR jauh lebih tinggi daripada ultrasonik, terutamanya radar berbilang talian. Kesan bahan khas: objek menyerap cahaya hitam atau objek pemantul spekular boleh mengurangkan kebolehpercayaan pengesanan. Kerumitan pengiraan: pemprosesan awan titik masa nyata memerlukan kuasa pengkomputeran yang tinggi (memerlukan GPU terbenam atau pemproses khusus)
Ⅱ. Kamera
(1) Bagaimana ToF menggunakan gelombang cahaya untuk mencapai 'pengukuran spatial' skala milimeter
Time-of-Flight (ToF) ialah salah satu daripada tiga teknologi pengimejan 3D arus perdana (dua yang lain ialah cahaya berstruktur dan penglihatan stereo binokular). Prinsipnya adalah untuk mendapatkan maklumat jarak (kedalaman) secara langsung dengan memancarkan cahaya inframerah dekat dan mengira masa perjalanan pergi balik cahaya. Berbanding dengan teknologi lain, ToF mempunyai kelebihan pengiraan mudah, anti-gangguan yang kuat, dan ukuran jarak jauh, jadi ia digunakan secara meluas dalam kamera belakang telefon mudah alih (cth, Huawei/OPPO/Apple), automasi industri, navigasi AGV dan cengkaman robot.
1. dof
dToF (Direct Time-of-Flight Ranging) terdiri daripada tiga komponen teras:
① VCSEL: memancarkan denyutan laser nanosaat;
② SPAD (Diod Avalanche Foton Tunggal): mengesan isyarat cahaya yang dipantulkan pada tahap satu foton;
③ TDC (Penukar Masa-ke-Digital): merekodkan dengan tepat masa pergi balik nadi optik.
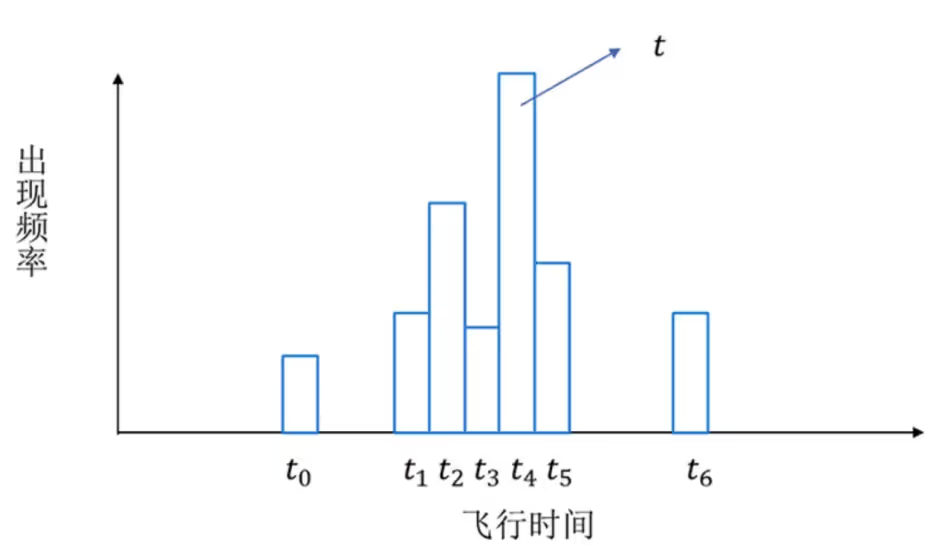
Prinsip operasi adalah seperti berikut: menghantar dan menerima N denyutan dalam bingkai tunggal, merekodkan masa penerbangan setiap kali melalui TDC dan menjana histogram, dan mengambil masa frekuensi tertinggi t untuk mengira kedalaman (d = ct/2). Teknik ini meningkatkan keupayaan anti-gangguan dengan ketara melalui pengoptimuman statistik dan mencapai pengukuran kedalaman ketepatan tinggi.
Walaupun prinsip dToF nampaknya sangat mudah, adalah sukar untuk mencapai tahap ketepatan yang tinggi. Sebagai tambahan kepada keperluan ketepatan yang sangat tinggi untuk penyegerakan jam, terdapat juga keperluan yang tinggi untuk ketepatan isyarat nadi. Fotodiod biasa hampir tidak dapat memenuhi permintaan sedemikian. Komponen teras dalam dToF, SPAD, tidak banyak pengeluar yang mampu menghasilkannya kerana kerumitan proses pengeluaran, dan ia sukar untuk disepadukan. Oleh itu, tidak banyak pengeluar sedang menyelidik dToF, dan lebih banyak lagi sedang menyelidik dan mempromosikan iToF.
2. itof
Konsep iToF sepadan dengan dToF, dan nama penuhnya ialah Time-of-Flight tidak langsung, yang secara langsung diterjemahkan kepada time-of-flight cahaya tidak langsung. Secara tidak langsung, ini bermakna iToF mengukur masa penerbangan cahaya secara tidak langsung dengan mengukur peralihan fasa, dan bukannya mengukur masa penerbangan cahaya secara langsung. iToF menghantar isyarat cahaya inframerah termodulat ke tempat kejadian, dan kemudian penderia menerima isyarat cahaya yang dipantulkan semula daripada objek yang akan diukur di tempat kejadian, dan kemudian mengira perbezaan fasa antara isyarat yang dihantar dan isyarat yang diterima berdasarkan cas terkumpul semasa masa pendedahan (penyepaduan) untuk mendapatkan kedalaman objek sasaran. kedalaman objek. Seperti yang ditunjukkan dalam rajah.
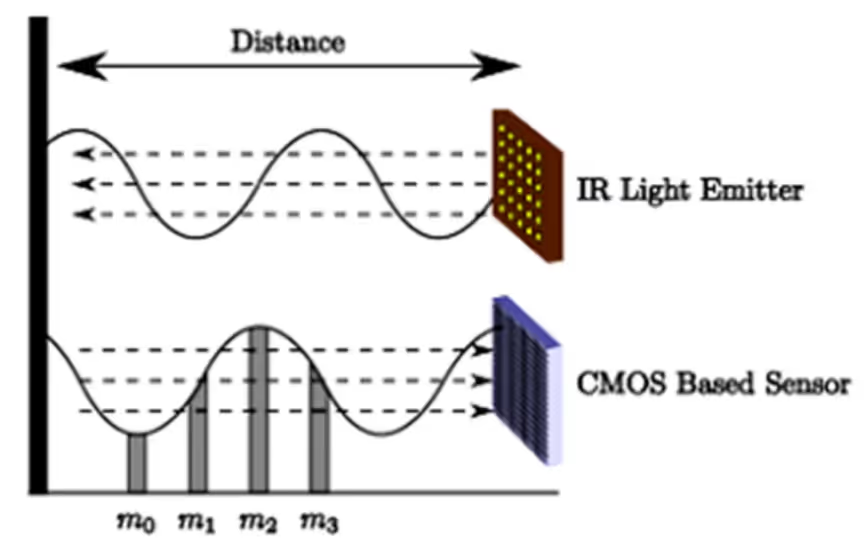
Komponen teras modul iToF terdiri daripada VCSEL dan penderia imej. VCSEL memancarkan cahaya inframerah termodulat pada frekuensi tertentu. Penderia imej menerima cahaya yang dipantulkan dan melakukan penukaran fotoelektrik semasa masa pendedahan (penypaduan). Pada penghujung pendedahan (penypaduan), data dibaca dan dihantar melalui penukar analog-ke-digital kepada unit pengiraan, yang mengira anjakan fasa setiap piksel. iToF mengira kedalaman menggunakan algoritma baldi 4 pensampelan, yang menggunakan 4 sampel dengan kelewatan fasa 0°, 90°, 180° dan 270° untuk mengira kedalaman. Seperti yang ditunjukkan dalam Rajah.

3. Penjanaan peta kedalaman
Penglihatan stereo binokular menggunakan kamera kiri dan kanan untuk mengambil gambar objek secara serentak, dan menggunakan paralaks (perbezaan dalam kedudukan objek dalam imej) untuk mengira kedalaman, serupa dengan persepsi jarak mata manusia; manakala kamera ToF secara langsung merekodkan nilai jarak masa penerbangan bagi setiap piksel, menghasilkan peta kedalaman resolusi tinggi (cth, 640×480), dan digabungkan dengan kamera RGB untuk membina awan titik 3D yang berwarna-warni, yang kedua-duanya merupakan teknologi teras untuk pemodelan persekitaran 3D.
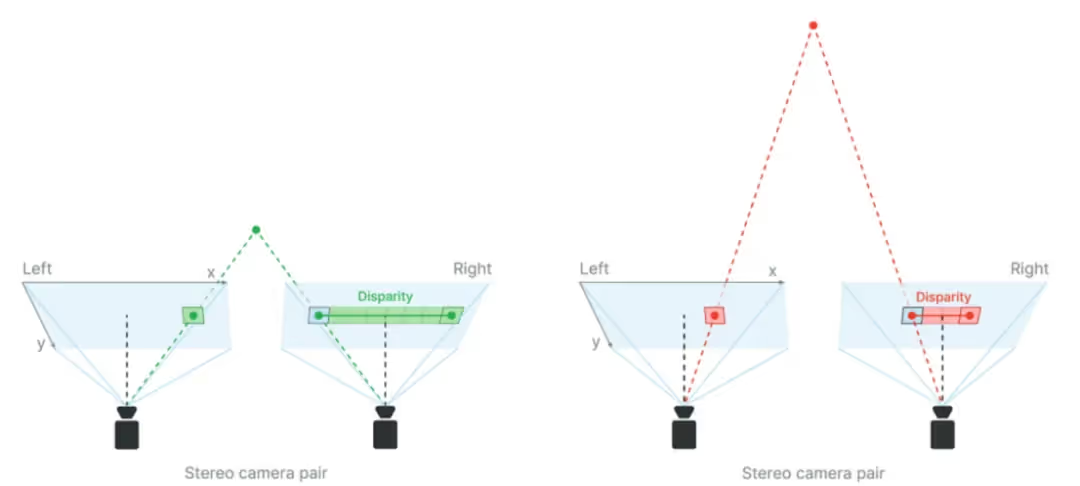
Formula pengiraan peta kedalaman skema prinsip paralaks:

Sama ada jarak garis dasar yang lebih besar atau panjang fokus yang lebih besar akan menghasilkan kedalaman yang lebih dalam pada paralaks yang sama, yang bermaksud ketepatan kedalaman yang lebih baik. Panjang fokus ialah jarak antara kanta kamera dan penderia imej. Lebih besar panjang fokus, lebih sempit FOV. Oleh itu, untuk mendapatkan persepsi kedalaman jarak jauh, anda boleh meningkatkan jarak garis dasar dan/atau mengurangkan FOV.
(2) Penggunaan kamera ToF dalam medan AGV
1. Penghindaran halangan dan perlindungan keselamatan
Pengelakan halangan dinamik: pengesanan masa nyata halangan dalam jarak 5m (cth orang, forklift, rak), mencetuskan nyahpecutan atau berhenti kecemasan. Zon keselamatan berbilang peringkat (cth, amaran di luar 1m, hentian kecemasan dalam 0.3m). Pengesanan Halangan Rendah: Kesan palet, kotak kargo, dsb. di atas tanah untuk mengelakkan AGV daripada berlanggar atau hancur.
2. pengenalan palet dan memilih garpu
Kedudukan Pallet: Kenal pasti kedudukan lubang garpu palet melalui peta kedalaman, dengan ketepatan ±3mm, menyesuaikan diri dengan jenis palet yang berbeza (kayu, plastik, logam). Pemilihan garpu automatik: Digabungkan dengan kawalan gerakan AGV, kedudukan lengan garpu dilaraskan untuk memastikan sisipan tepat.
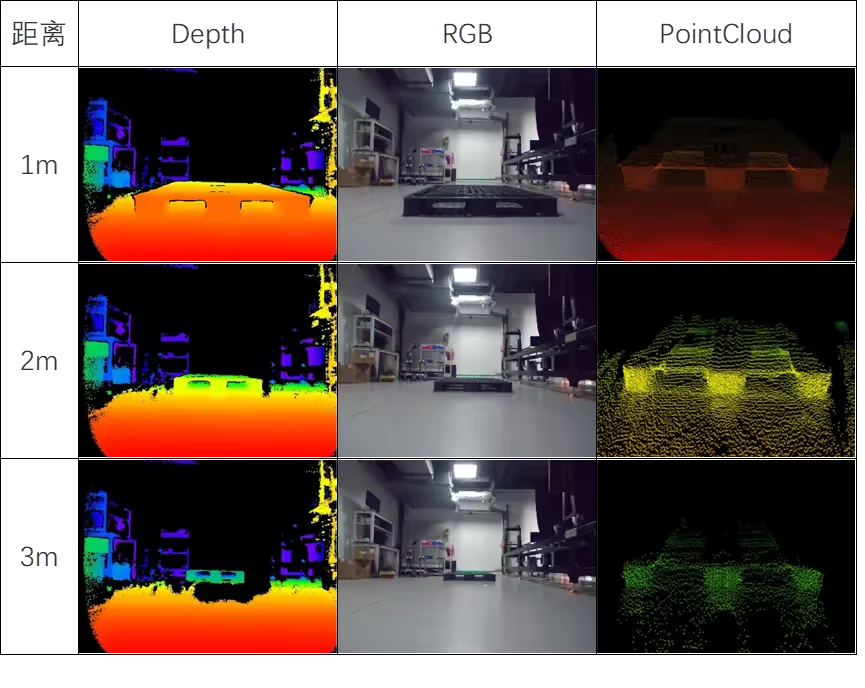
Hasil pengesanan kamera ToF bagi palet hitam ditunjukkan dalam rajah berikut, kedalaman ialah peta kedalaman, RGB ialah peta warna, PointCloud ialah data awan titik, awan titik asal diproses melalui algoritma persepsi, dan output akhir ialah kedudukan dua dimensi palet berbanding pusat badan kenderaan.
Pengesanan tindanan: Pengukuran ketinggian kargo untuk memastikan kestabilan susun berbilang lapisan.
Pengukuran Isipadu: Kira saiz petak (L x W x H) untuk pengisihan logistik.
(3) Kelebihan teknikal kamera ToF
Ⅲ. Transduser lain
(1) Penderia Ultrasonik
1. Prinsip: Hantar nadi ultrasonik 40kHz-200kHz, terima isyarat yang dipantulkan untuk mengira jarak.
2. Aplikasi:
Pengelakan halangan AGV/pengesan di tempat: sudut rasuk biasa 15°~30° (liputan jarak lebar, ketepatan rendah);
Pengesanan objek lutsinar (kaca/akrilik);
Berbilang peranti perlu menghalang cakap silang, dan zon buta (5-20cm) perlu menjadi pelengkap inframerah/laser.
3. Kelebihan:
Tahan kepada gangguan cahaya/habuk/kabus, menyesuaikan diri dengan persekitaran kompleks industri;
Kos yang sangat rendah ($10~100 seunit), jangka hayat (>100,000 kali ganda);
Tidak bersentuhan dan tidak haus dan lusuh.
4. Kelemahan:
Ketepatan rendah (± 1~5cm, pengaruh suhu dan kelembapan), memerlukan gabungan pelbagai sensor;
Tindak balas dinamik perlahan (50~100ms), tidak berkenaan dengan adegan berkelajuan tinggi (>1.5m/s);
gangguan pantulan berbilang laluan, bergantung pada algoritma (seperti RANSAC), bunyi penapisan
(2) Unit Pengukuran Inersia (IMU)
1. Prinsip:
Ia terdiri daripada giroskop (mengukur halaju sudut) dan pecutan (mengukur pecutan linear), dengan magnetometer bersepadu separa untuk membantu dalam penentukuran tajuk;
Output sudut Euler melalui penyelesaian sikap dan algoritma penapisan (cth penapisan Kalman).
2. Aplikasi:
Navigasi AGV: menggabungkan data pengekod untuk mengimbangi hanyut tajuk dan meningkatkan ketepatan kedudukan;
Kawalan sikap dinamik: pemantauan masa nyata sudut padang/gulungan garpu untuk melaraskan sikap kargo;
Kedudukan bebas infrastruktur: navigasi autonomi dalam terowong, dalam dan senario bebas GPS yang lain.
3. Kelebihan:
Autonomi sepenuhnya, tidak bergantung pada isyarat luaran (GPS/pemantul);
Kemas kini frekuensi tinggi (sehingga 1kHz), masa nyata;
Tahan kepada cahaya/habuk/gangguan elektromagnet (kecuali magnetometer).
4. Kelemahan:
Ralat terkumpul: hanyut giroskop memerlukan pembetulan gabungan berbilang sensor (penglihatan/odometer);
Kebergantungan penentukuran: penentukuran pegun bagi pincang sifar diperlukan pada permulaan, penyelenggaraan tetap;
Penjajaran awal: pemulaan sikap statik mendatar atau diketahui diperlukan semasa permulaan
(3) Pengekod wayar tarik
1. Prinsip: Pengukuran anjakan melalui gabungan penghantaran mekanikal dan pengekod: wayar tarik (wayar keluli/gentian) bergerak dan menarik balik dengan objek, memacu pengekod dalaman berputar dan menukar anjakan kepada isyarat elektrik (formula: anjakan = resolusi pengekod x bilangan denyutan x lilitan roda)
2. Aplikasi: termasuk kawalan ketepatan garpu AGV (ketepatan ±1mm), perataan badan tanjakan dan penentukuran penyebar kontena;
3. Kelebihan: ketepatan ultra-tinggi (±0.01mm), anti-gangguan (habuk/elektromagnet), perjalanan jauh (sehingga 50m) dan pemasangan yang fleksibel;
4. Kekurangan: haus dan lusuh mekanikal memerlukan penyelenggaraan yang kerap, pergerakan berkelajuan tinggi mudah digoncang (> 1m / s), dan hanya menyokong pengukuran satu arah; berbilang darjah kebebasan memerlukan gabungan berbilang peranti
(4) Penderia jarak fotoelektrik
1. Prinsip: memancarkan cahaya inframerah dan mengesan keamatan yang dipantulkan; semakin dekat jarak, semakin kuat isyarat yang dipantulkan (tiada nilai jarak yang tepat, hanya penilaian ambang).
2. Aplikasi: Biasanya digunakan untuk mengelak halangan mudah atau pengesanan di tempat.
3. Kelebihan: kos yang sangat rendah. Pengukuran bukan sentuhan: elakkan haus dan lusuh mekanikal, jangka hayat. Respons berkelajuan tinggi: pengesanan milisaat. Gangguan anti-elektromagnet: sesuai untuk persekitaran kompleks industri.
4. Kelemahan: sangat dipengaruhi oleh warna objek dan bahan permukaan. Gangguan optik: cahaya kuat, pantulan spekular dan objek lutsinar akan menjejaskan ketepatan. Had julat julat, nilai had julat am adalah jauh lebih rendah daripada laser
Kesimpulan
Panduan komprehensif ini meneroka cara teknologi penderia termaju meningkatkan kecerdasan dan ketangkasan AGV (Kenderaan Berpandu Automatik).
Bersama-sama, teknologi ini membentuk asas deria untuk penyelesaian pengendalian bahan yang pintar, responsif dan sangat automatik.
Sebagai sebuah perusahaan dalam bidang penyelesaian logistik pintar, AiTEN Robotics sentiasa memfokuskan pada senario 'kilang pintar', menyepadukan secara mendalam inovasi teknologi dan permintaan industri, dan telah menyediakan perkhidmatan yang komprehensif untuk lebih daripada 200 pelanggan pembuatan di seluruh dunia: bergantung pada rangkaian penuh pengendalian matriks produk robot untuk meliputi pelbagai senario pengendalian tahap industri yang cekap, penjadualan sistem yang cekap dan cekap. pelbagai peralatan, dan sistem penjadualan pintar peringkat industri yang dibangunkan sendiri untuk mencapai kerjasama yang cekap bagi pelbagai peralatan. Kami telah menyediakan perkhidmatan yang komprehensif kepada lebih daripada 200 pelanggan pembuatan di seluruh dunia: bergantung pada rangkaian penuh robot pengendalian untuk merangkumi senario pengendalian yang pelbagai, sistem penjadualan pintar peringkat industri yang dibangunkan sendiri untuk mencapai kerjasama yang cekap berbilang peranti, dan sistem perkhidmatan kitaran hayat penuh yang meliputi perancangan pra-jualan, penggunaan dan pelaksanaan untuk memastikan keoptimuman operasi dan penyenggaraan yang sebenar, kami telah mentransformasikan logistik operasi dan penyelenggaraan yang sebenar, untuk memperkasakan industri pembuatan dalam peningkatan digital dan pembangunan kualiti.

