








AGV (Automated Guided Vehicle) Multi-sensor Fusion untuk Teknologi Mengelak Halangan Masa Nyata
_%E7%94%BB%E6%9D%BF%201.avif)

I Pengenalan Sistem Penghindaran Halangan Masa Nyata AGV Multi-sensor Fusion
1. Pengenalan
Teknologi gabungan sensor adalah kunci untuk robot mencapai liputan penuh mengelakkan halangan. Prinsipnya dimodelkan pada cara otak manusia memproses maklumat secara integratif: dengan menyelaraskan berbilang penderia (cth, LIDAR, kamera penglihatan, dsb.) untuk penyepaduan maklumat berbilang peringkat dan berbilang dimensi, ia menebus pengehadan penderia tunggal, dan akhirnya membina persepsi yang konsisten terhadap alam sekitar. Teknologi ini menyepadukan kelebihan pelengkap data berbilang sumber (cth, pengukuran jarak yang tepat dan pengecaman objek) dan mengoptimumkan aliran pemprosesan maklumat melalui algoritma pintar, supaya AGV dapat meningkatkan ketepatan pengelakan halangan dan kebolehsuaian alam sekitar secara serentak dalam persekitaran dinamik yang kompleks.
2. Meningkatkan Ketepatan Pengesanan
Integrasi LiDAR (pengukuran jarak yang tepat, tetapi silau mudah diganggu), penglihatan (pengenalpastian jenis objek, cahaya malap adalah terhad) dan ultrasonik (pengesanan zon buta pada jarak dekat) dan data berbilang sensor lain, kekurangan pelengkap, untuk meningkatkan ketepatan pengenalpastian halangan.
3. Kebolehpercayaan Sistem yang Dipertingkatkan
Reka bentuk berlebihan memastikan bahawa apabila penderia tunggal gagal (cth kegagalan LIDAR), penderia lain masih boleh mengekalkan pengelakan halangan; digabungkan dengan penapisan Kalman dan algoritma lain, gangguan hingar ditapis untuk meningkatkan kestabilan data.
4. Kebolehsuaian Alam Sekitar Lanjutan
Penukaran dinamik penderia berfaedah untuk menangani adegan yang kompleks, seperti gangguan elektromagnet apabila pilihan data anti-jamming, gabungan asap persekitaran ultrasonik dan LiDAR, dan untuk halangan telus/tergantung untuk membolehkan inframerah dan penderia khas lain.
5. Optimumkan Membuat Keputusan Mengelak Halangan
Melalui penderiaan sekatan berbilang penderia (cth menggambarkan zon pengelakan/lencongan halangan di hadapan), menyepadukan jarak halangan (LIDAR), jenis (penglihatan) dan maklumat kedekatan (ultrasonik), menjana model persekitaran global dan merancang laluan optimum dengan tepat.
II Prinsip Pengelakan Halangan Gabungan Berbilang Sensor
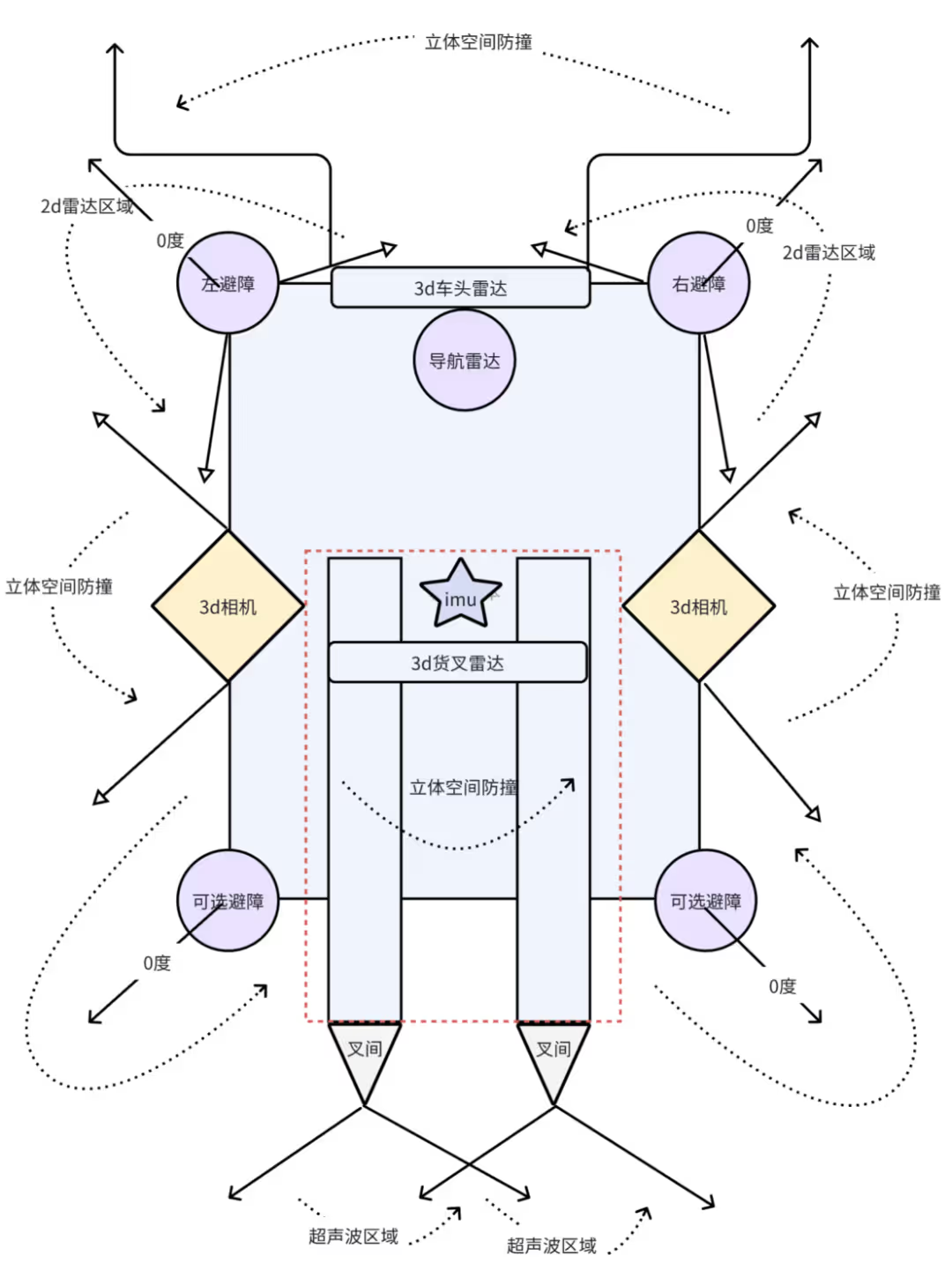
1. Reka Letak Biasa
- Pengelakan halangan utama hadapan: Halangan pengimbasan laser 2D kiri dan kanan secara mendatar, ultrasonik bawah menambah pengesanan halangan rendah, laser 3D serong atas hadapan meliputi ruang tiga dimensi.
- Perlindungan Lateral: Kamera kedalaman yang dipasang condong pada kedua-dua belah untuk menghilangkan titik buta sisi AGV.
- Pengelakan perlanggaran garpu: Garpu dilengkapi dengan IMU untuk memantau sikap dalam masa nyata, digabungkan dengan data laser 3D atas dan bawah untuk meramal trajektori garpu secara dinamik dan melindungi kawasan sekitar.
- Pengelakan perlanggaran antara garpu: Penderia ultrasonik dwi memantau halangan di kawasan sektor di kedua-dua belah bahagian belakang kenderaan.
2. Kaedah Gabungan
- Tahap data: Satukan cap masa berbilang penderia dan sistem koordinat, dan gabungkan data awan titik secara langsung.
- Tahap ciri : Gabungan ciri tepi LiDAR dengan ciri SIFT visual, pembelajaran mendalam menggunakan PointNet++ (awan titik) dan CNN (imej), atau menjana peta kebarangkalian halangan melalui EKF.
- Tahap keputusan: Rangkaian Bayesian secara dinamik menimbang keyakinan setiap sensor, ultrasonik mencetuskan hentian kecemasan dalam senario kecemasan dan LiDAR merancang laluan lencongan.
3. Penderiaan Persekitaran
- Pembahagian kerja yang jauh dan dekat: Awan titik radar 3D mengesan halangan global di hujung yang jauh, dan kamera kedalaman mengenal pasti halangan tempatan di hujung yang hampir.
- Definisi halangan: termasuk orang, barang, forklift dan objek lain dengan isipadu, proses teras ialah 'pengesanan → pengesanan → penyetempatan' (pengesahan kewujudan → ramalan trajektori → pengiraan jarak).
- Peta semantik: melabelkan kategori halangan (cth rak, lif) melalui pembahagian contoh, mengekstrak kontur dan memetakannya ke peta untuk menyokong pembuatan keputusan mengelak halangan pintar.
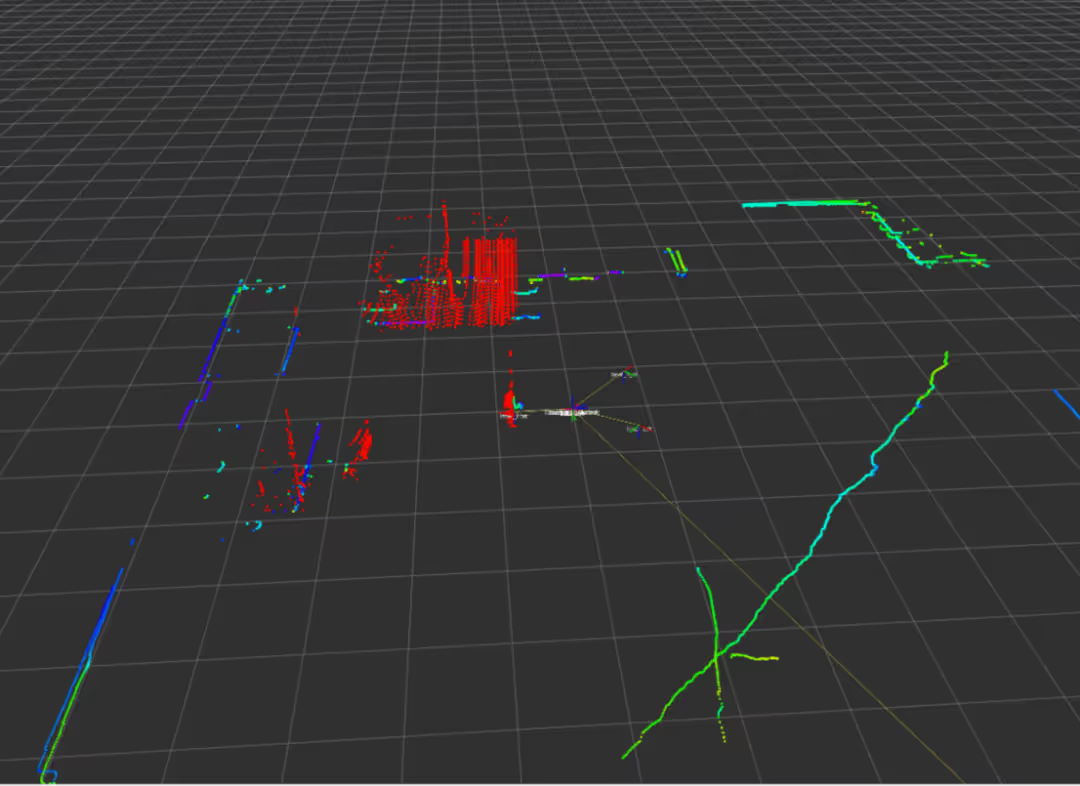
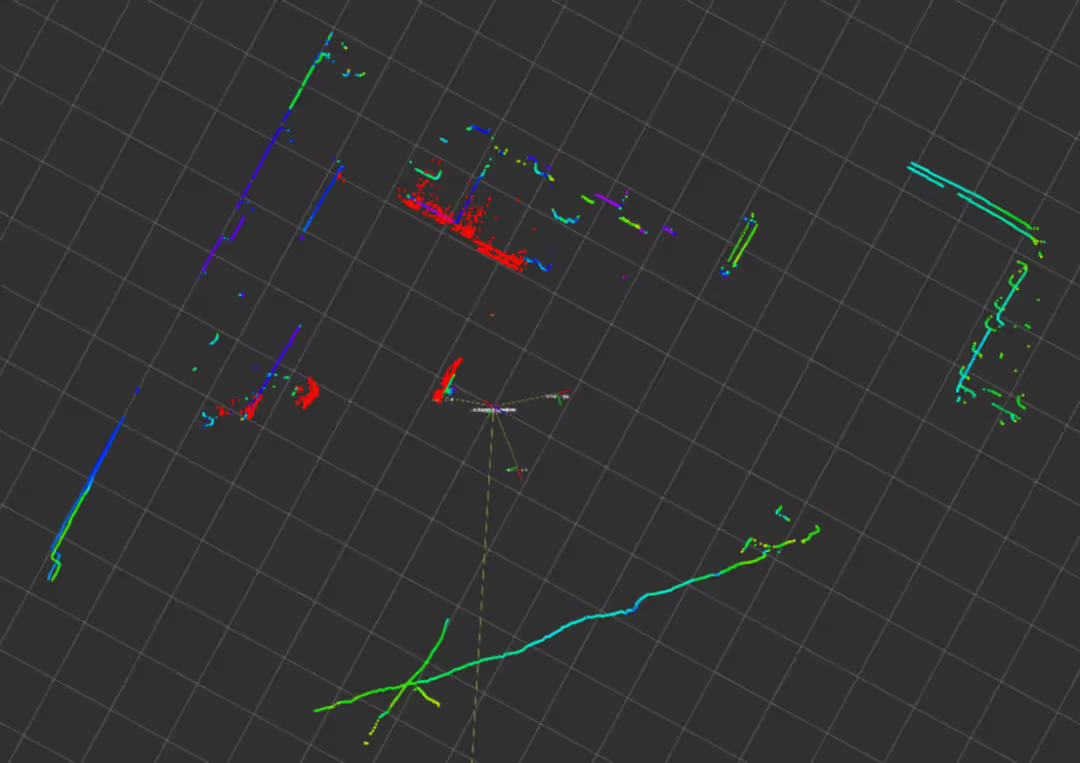
- Proses Pengelakan Halangan Global: Untuk masalah data awan titik yang besar dan bising, penapisan dan pensampelan bawah dijalankan terlebih dahulu; selepas membahagikan awan titik bumi, gugusan halangan darat dibahagikan mengikut algoritma pengelompokan, dan atribut seperti pusat/dimensi dipasang pada bingkai yang disertakan; digabungkan dengan rangka kerja pengesanan sasaran awan titik (cth, PointPillar), anotasi semantik dan penjejakan dijalankan, dan penapis Kalman dibina untuk melicinkan trajektori, dan pengoptimuman serentak aritmetik dilakukan untuk menjamin pemprosesan masa nyata; pampasan dan pembetulan diperlukan apabila herotan gerakan wujud. masa nyata; pembetulan pampasan diperlukan apabila herotan gerakan wujud.
4. Algoritma Mengelak Halangan Masa Nyata
- Pengelakan Halangan Setempat: Kamera kedalaman meliputi kawasan hampir persisian badan, fork IMU memberikan maklum balas masa nyata sudut sikap, dan penderia bawah memantau halangan ruang.
- Perancangan semula laluan: berdasarkan kelajuan AGV (kitaran 100- 200ms), pensampelan trajektori yang boleh dilaksanakan melalui kaedah tetingkap dinamik, meramalkan arah aliran pergerakan halangan dinamik, laluan pengoptimuman masa nyata.
- Bantuan pembelajaran pengukuhan: digabungkan dengan DQN, PPO dan algoritma lain, melatih AGV untuk menyesuaikan diri dengan adegan dinamik yang kompleks dalam persekitaran simulasi untuk meningkatkan keupayaan membuat keputusan autonomi.
III Cabaran dan Masa Depan Gabungan Berbilang Penderia Mengelak Halangan
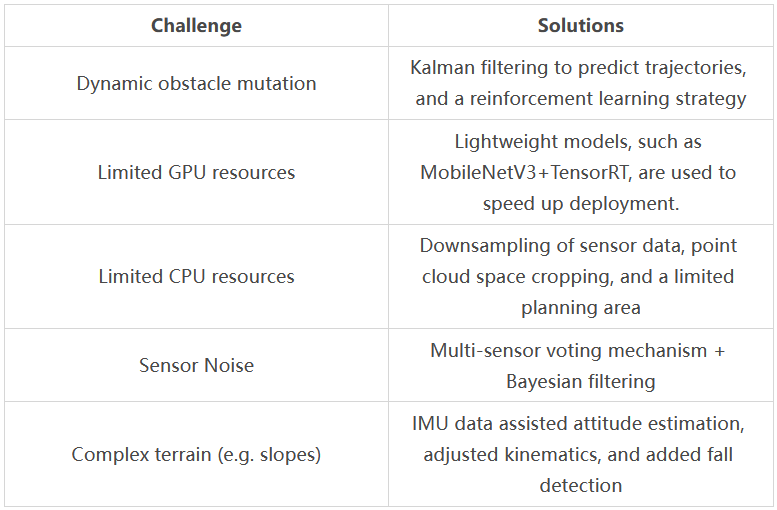
1. Senario Aplikasi Mengelak Halangan AGV
Senario aplikasi praktikal mengelakkan halangan AGV sering menghadapi beberapa kesukaran. Senarai cabaran dan penyelesaian berikut:
2. Hala Tuju Masa Depan
- Strategi bionik: meniru tingkah laku koloni semut/kaum burung untuk meramalkan trajektori halangan yang dinamik.
- Gabungan saraf: model hujung ke hujung (cth PointNet+++Transformer) untuk memproses terus data LiDAR dan penglihatan.
- Seni bina seperti otak: rangkaian saraf impuls (SNN) untuk membuat keputusan berkuasa rendah, mekanisme perhatian LSTM+ untuk meramalkan gerakan halangan siri masa yang panjang.
- Pengkomputeran bersama: pemprosesan berlapis awan-tepi-hujung untuk mengurangkan tekanan aritmetik on-board.
- Penghijrahan simulasi: rawak domain untuk generalisasi yang dipertingkatkan, penyesuaian dalam talian masa nyata penalaan halus model (cth Meta-RL).
- Kecerdasan populasi: pembelajaran bersekutu untuk mengoptimumkan laluan berbilang AGV, teori permainan untuk menyelaraskan laluan secara dinamik.
- Matlamat: Untuk membina sistem pintar 'sensing-decision-control', melalui algoritma bio-inspired, kerjasama merentas domain (V2X/digital twin) dan perkakasan cekap tenaga, untuk merealisasikan keupayaan pemanduan seperti manusia dalam persekitaran yang kompleks, dengan mengambil kira keselamatan, kecekapan dan etika.
Langgan AiTEN Robotics untuk kandungan yang lebih teknikal.

