








Comment les chariots élévateurs à fourche AGV planifient-ils les trajets ?
_%E7%94%BB%E6%9D%BF%201.avif)
Dans les domaines de la logistique moderne et de l'automatisation industrielle, les véhicules à guidage automatique (AGV) sont devenus une technologie de base. Ces véhicules de navigation autonomes jouent un rôle crucial dans la simplification des processus de manutention, l'amélioration de l'efficacité et la réduction des erreurs humaines. Ils sont capables d'effectuer des tâches de manutention sans intervention humaine, et l'une des technologies clés à cet égard est la planification des trajectoires. Comment les chariots élévateurs à fourche AGV parviennent-ils à planifier leur trajectoire ?
Qu'est-ce que la planification de la trajectoire d'un AGV ?
En termes simples, la planification des trajectoires consiste à trouver le chemin optimal ou sans collision qu'un AGV doit emprunter pour aller de son point de départ (point A) à sa destination (point B) dans un environnement de travail comportant des obstacles (étagères, postes de travail, autres AGV). Une planification efficace des trajectoires permet aux AGV de fonctionner en harmonie avec leur environnement, ce qui maximise le rendement et minimise les temps d'arrêt.
Son importance est évidente :
- Amélioration de l'efficacité : Des chemins d'accès optimaux se traduisent par des temps de travail plus courts et un débit plus élevé.
- Sécurité assurée : Éviter les collisions entre les AGV, entre les AGV et les personnes ou les équipements, et assurer la sécurité des personnes, des machines et des marchandises.
- Réduction des coûts : Réduire le kilométrage inutile, économiser l'énergie et prolonger la durée de vie des équipements.
- Coordination du système : Permet à plusieurs AGV de travailler ensemble pour assurer le bon fonctionnement de l'ensemble du système.
Les principales méthodes de planification de la trajectoire des AGV
La planification des itinéraires n'est pas un processus en une seule étape ; il s'agit généralement d'un processus décisionnel dynamique à plusieurs niveaux.
1. Planification de trajectoires fixes
Des bandes magnétiques, des codes QR ou des pistes électromagnétiques sont utilisés pour la navigation.
Avantages : Stable et fiable, convient aux usines et aux entrepôts à configuration fixe.
Inconvénients : Manque de flexibilité ; la voie doit être posée à nouveau lors d'un changement de chemin.
2. Planification des chemins de navigation à partir d'une carte
Grâce à des technologies telles que le LiDAR et le SLAM visuel, les AGV peuvent établir des cartes de leur environnement et se localiser en temps réel.
Avantages : Grande flexibilité, adaptabilité aux environnements dynamiques et possibilité de navigation sans rail.
Inconvénients : Exigences élevées en matière de puissance de calcul et de précision des capteurs, et coût relativement élevé.
3. Planification globale de la trajectoire
Il s'agit de la conception de haut niveau réalisée avant le début de la tâche. Le système calcule une trajectoire théorique optimale pour l'AGV sur la base d'une carte globale statique connue (comprenant toutes les zones d'obstacles fixes). Sur l'ensemble du plan de l'usine ou de l'entrepôt, le système AGV précalcule la trajectoire optimale globale du point de départ au point d'arrivée.
Algorithmes courants : Algorithme A-Star, algorithme de Dijkstra, algorithme de l'arbre aléatoire à expansion rapide (RRT).
Caractéristiques : Planification optimale des trajets, adaptée à la répartition des tâches à grande échelle.
4. Planification locale des trajets
Des ajustements en temps réel sont effectués pendant le fonctionnement afin d'éviter les obstacles soudains ou les perturbations dynamiques.
En fonctionnement réel, des obstacles dynamiques qui ne sont pas présents sur la carte globale sont inévitablement rencontrés, tels que des travailleurs apparaissant soudainement, des palettes placées temporairement ou d'autres AGV en mouvement. Dans ce cas, une planification locale est nécessaire.
Méthodes courantes : méthode du champ potentiel artificiel, méthode de la fenêtre dynamique.
Caractéristiques : améliore la sécurité et l'adaptabilité, mais la trajectoire peut ne pas être optimale au niveau mondial.
Étapes de mise en œuvre de la planification de la trajectoire de l'AGV
Un processus complet de planification de trajectoire combine généralement la planification globale et locale, avec les étapes spécifiques suivantes :
1. Analyse des besoins : Le WMS/MES émet des tâches, détermine le point de départ, le point d'arrivée, la capacité de charge, etc.
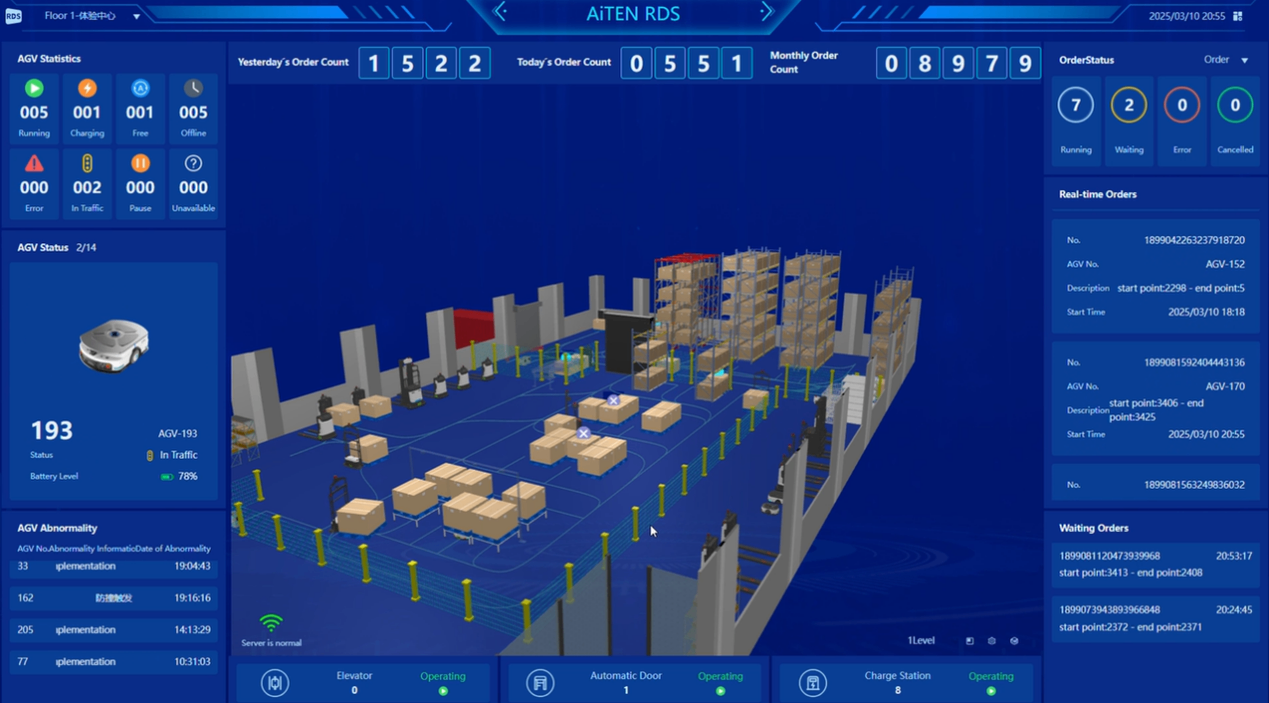
2. Modélisation de l'environnement : Utilisation de la technologie SLAM pour construire une carte bidimensionnelle ou tridimensionnelle de l'environnement de travail, et marquage sur la carte des points clés tels que les zones d'obstacles, les zones carrossables, les stations de recharge et les postes de travail.
3. Calcul de la trajectoire globale : Le système de planification utilise des algorithmes pour calculer la trajectoire théoriquement optimale de l'AGV sur la carte.
4. Gestion du trafic : Le système vérifie si la trajectoire est en conflit avec les trajectoires planifiées d'autres AGV. Si nécessaire, il coordonne (par exemple, en demandant à un AGV d'attendre brièvement à un nœud) ou réorganise la trajectoire.
5. Distribution de la trajectoire : La trajectoire planifiée est distribuée à l'AGV.
6. Évitement local des obstacles en temps réel : L'AGV se déplace le long de la trajectoire tandis que les capteurs analysent en permanence l'environnement. Lorsqu'il détecte un obstacle, il l'évite ou le réachemine immédiatement.
7. Exécution de la tâche et retour d'information : L'AGV atteint le point cible, accomplit la tâche et transmet son statut au système.
Quels sont les facteurs qui influencent la planification des itinéraires ?
- Complexité de l'environnement : Les rayonnages de l'entrepôt, la largeur des allées et l'emplacement des points de ramassage des chariots élévateurs sont autant d'éléments qui influencent l'itinéraire.
- Planification des tâches : Lorsque plusieurs AGV fonctionnent simultanément, il faut éviter les encombrements.
- La sécurité : Dans les domaines où les hommes et les machines travaillent ensemble, la sécurité doit recevoir la plus haute priorité afin de garantir un fonctionnement sûr dans un environnement de coexistence homme-machine.
- Optimisation de l'efficacité : Minimiser les taux de rotation à vide et la consommation d'énergie afin d'améliorer l'efficacité logistique globale.
Cas d'application
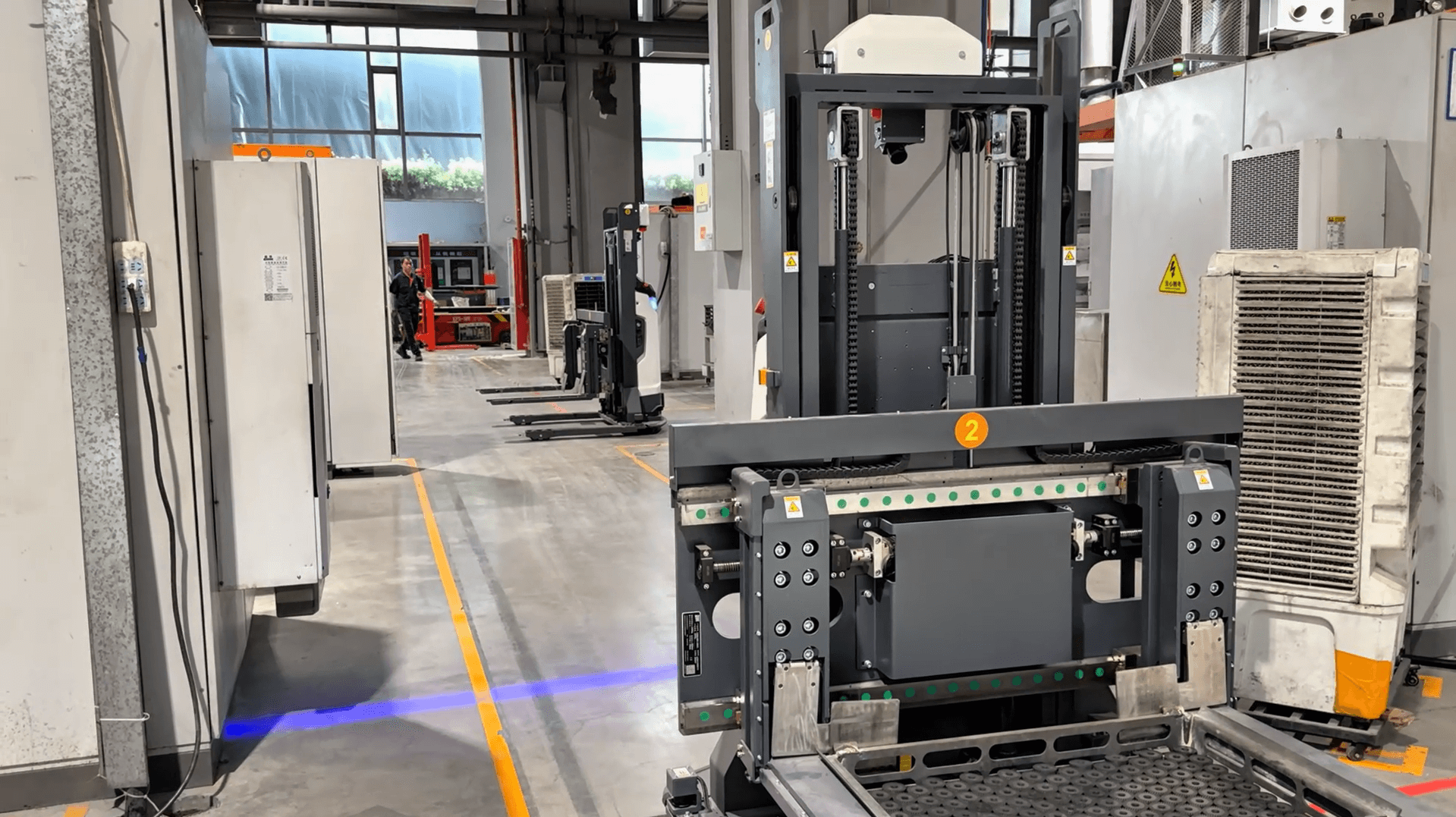
La technologie de planification des trajectoires des AGV a un large éventail d'applications. Par exemple, les chariots élévateurs sans conducteur d'AiTEN Robotics utilisent la navigation SLAM par laser et des algorithmes intelligents d'IA pour réaliser un transport flexible dans des scénarios tels que les pièces automobiles et la transformation des aliments. Le système peut non seulement sélectionner automatiquement l'itinéraire optimal, mais aussi effectuer un évitement intelligent et une optimisation de la trajectoire lorsque plusieurs véhicules sont en fonctionnement, ce qui améliore considérablement l'efficacité de l'entrepôt et de la production.
Dans les usines de fabrication, les AGV sont généralement utilisés pour transporter des matières premières, des travaux en cours et des produits finis entre différents postes de travail. En utilisant des algorithmes avancés de planification des trajectoires, les AGV peuvent naviguer dans des plans d'usine complexes, éviter les obstacles et les autres AGV, et livrer les matériaux et les produits rapidement et efficacement.
Dans le secteur de la logistique et de l'entreposage, les AGV jouent un rôle crucial dans la gestion des stocks, l'exécution des commandes et le transport. Les AGV peuvent être programmés pour naviguer, ramasser et transporter des palettes de marchandises dans les entrepôts, et même pour charger et décharger des marchandises. En optimisant la planification des trajets, les AGV peuvent se déplacer efficacement dans les entrepôts, en réduisant les déplacements inutiles et en améliorant la vitesse de traitement des commandes.
Conclusion
La planification des trajectoires pour les AGV est un élément essentiel de l'automatisation de la logistique, allant des trajectoires fixes à la navigation intelligente, et de la planification globale à l'évitement d'obstacles en temps réel. Les différents choix technologiques déterminent les scénarios applicables et les niveaux d'efficacité du système. Avec le développement continu de l'intelligence artificielle et de la technologie des capteurs, la planification des trajectoires des AGV deviendra de plus en plus intelligente et constituera une base solide pour la modernisation de l'automatisation des usines et des entrepôts.
La sélection d'une solution de planification des trajets appropriée nécessite une prise en compte globale des exigences de flexibilité du scénario commercial, de la complexité de l'environnement et du budget d'investissement. La compréhension des principes sous-jacents aidera les entreprises à mieux concevoir et mettre en œuvre les systèmes AGV, libérant ainsi véritablement le potentiel de la logistique intelligente.
À propos d'AiTEN Robotics
En tant qu'entreprise spécialisée dans les solutions logistiques intelligentes, AiTEN Robotics s'est toujours concentrée sur le scénario de l'"usine intelligente", en intégrant profondément l'innovation technologique aux besoins de l'industrie. Elle a fourni des services complets à plus de 200 clients industriels dans le monde entier : En s'appuyant sur une gamme complète de portefeuilles de robots de manutention pour couvrir divers scénarios de manutention, nous avons développé un système de planification intelligent de niveau industriel pour permettre une collaboration efficace entre plusieurs dispositifs. Grâce à un système de service complet couvrant la planification avant-vente, le déploiement et la mise en œuvre jusqu'à l'optimisation des opérations, nous donnons aux entreprises les moyens de réaliser la transformation de l'intelligence logistique, en stimulant continuellement la modernisation numérique et le développement de haute qualité de l'industrie manufacturière.
Contactez-nous pour explorer les solutions d'automatisation pour votre usine.

