








Analyse de la technologie de planification des trajectoires pour la manutention de palettes par AGV
_%E7%94%BB%E6%9D%BF%201.avif)
.avif)
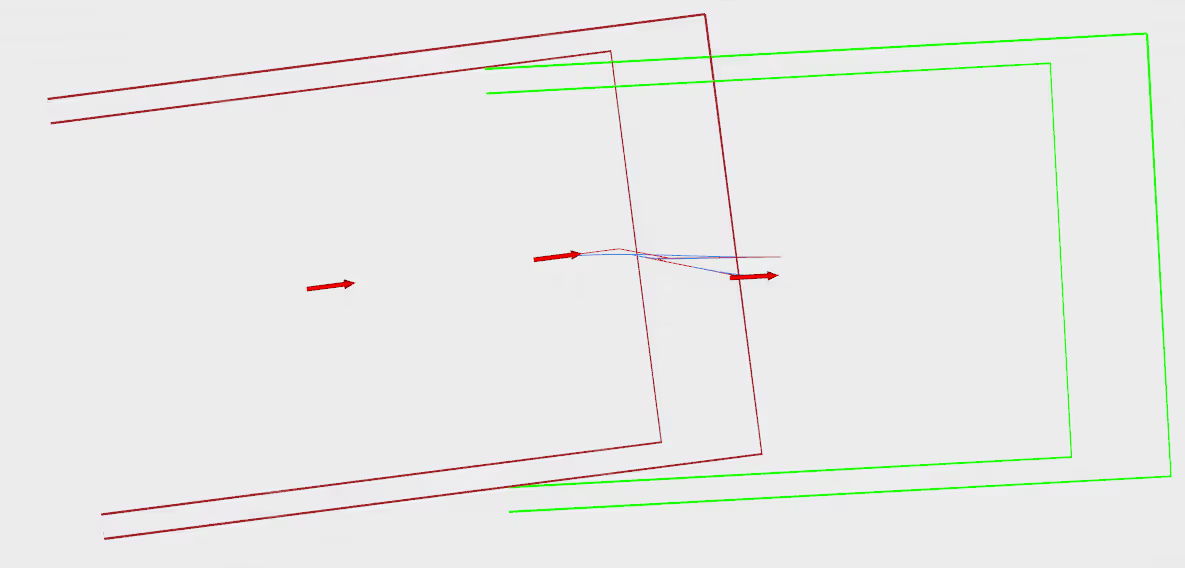
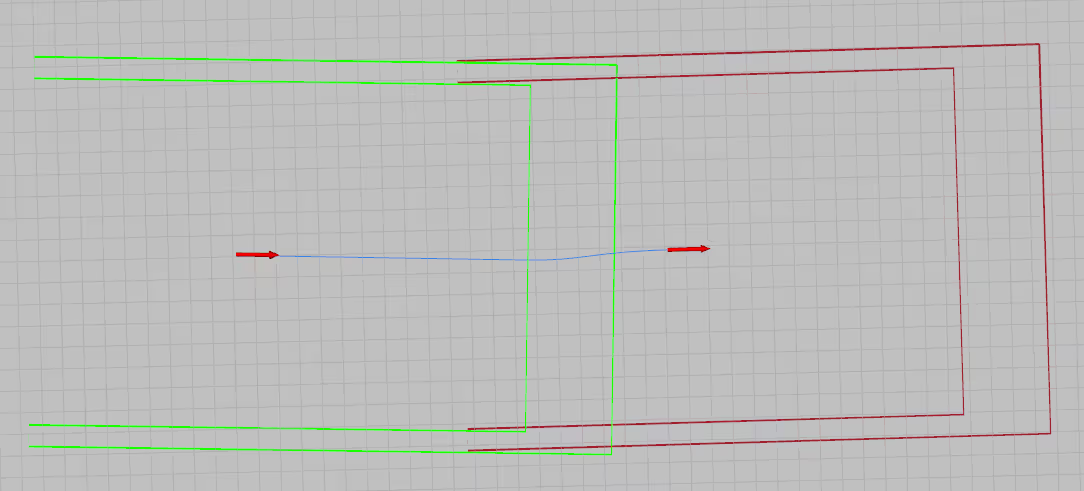
La précision de la prise et de la dépose des palettes par les AGV repose sur une technologie avancée de planification des trajectoires. Cette tâche exige non seulement des trajectoires sans collision, mais aussi une posture de haute précision et des trajectoires fluides à l'approche des palettes. Cet article analyse les technologies de base permettant d'atteindre cet objectif, telles que l'application coordonnée des courbes hybrides A et de Bézier.
Pourquoi la manutention de palettes nécessite-t-elle une planification particulière des trajets ?
Défis:
- Une grande précision au bout du compte : Les fourches doivent être alignées sur les trous de fourche des palettes avec une précision centimétrique/millimétrique et répondre à des exigences strictes en matière d'orientation du stationnement.
- Fortes contraintes de mouvement : Le respect strict des dimensions de l'AGV, du rayon de braquage minimum et des contraintes non complètes (pas de mouvement latéral) est nécessaire, en particulier dans les espaces étroits.
- Fluidité de la trajectoire : Évitez les accélérations, décélérations ou virages brusques pour garantir la stabilité de la cargaison et la sécurité des opérations.
- Évitement des obstacles avec une précision proche de la fin : Une détection de haute précision est nécessaire lors de l'approche des palettes pour éviter les obstacles inconnus ou les erreurs de positionnement.
Analyse technique
1. Planification globale de la trajectoire
Technologie : Dijkstra, standard A*
Fonction : Générer rapidement un chemin général (connecté, à faible coût) du point de départ à la zone du plateau sur la carte de la grille globale.
Caractéristiques : Vitesse rapide, ne tient pas compte des détails cinématiques.
2. Planification fine de la trajectoire du point d'arrivée
Technologie de base : Hybride A**
Avantages : Recherche dans un espace d'état continu (x, y, θ) et intégration directe de modèles cinématiques de véhicules (tels que les modèles de bicyclettes).
Effets : Génère des trajectoires réalisables qui atteignent la position cible exacte (x, y, θ) et respectent des contraintes telles que le rayon de braquage, ce qui permet de résoudre des problèmes de braquage complexes dans le "dernier mètre".
3. Lissage et optimisation des trajectoires
Technologie de base : Courbes de Bézier
Avantages : Génère des courbes lisses et continues par le biais de points de contrôle, en veillant à ce que les positions de départ et d'arrivée ainsi que les directions (tangentes) soient contrôlables.
Applications : Lissage des trajectoires générées par la recherche (contenant souvent des angles), assurant une courbure continue ; connexion des segments de trajectoire ; génération de trajectoires à vitesse continue.
Technologies alternatives : B-splines, NURBS.
4. Évitement des obstacles et ajustement de la trajectoire en temps réel
Technologie : Algorithme de fenêtre dynamique (DWA), bande élastique temporelle (TEB), replanification rapide.
Fonction : Sur la base des données des capteurs, ajuster localement la trajectoire/vitesse pour éviter les obstacles dynamiques tout en restant aussi proche que possible de la trajectoire optimisée d'origine.
Convergence des technologies
Le processus de planification de la trajectoire de prélèvement et de placement des palettes par AGV peut être le suivant.
1. Planification globale (A*) : Planifier une trajectoire approximative depuis le point de départ jusqu'à proximité de la zone des palettes sur la carte quadrillée.
2. Interrupteur de planification terminale : Déclenche la planification détaillée lorsque l'AGV s'approche de la zone des palettes.
3. Accostage précis (Hybride A*) : Planifier une trajectoire conforme à la cinématique jusqu'à la position cible (x, y, θ).
4. Lissage de la trajectoire (Bézier/Spline) : Lisse le chemin cousu pour générer un chemin final géométriquement continu.
5. Génération de la trajectoire : Générer une trajectoire avec des contraintes de vitesse/accélération sur la base de la trajectoire lissée pour que le contrôleur l'exécute.
6. Évitement des obstacles en temps réel : Surveillez l'ensemble du processus et ajustez dynamiquement la trajectoire/vitesse pour éviter les obstacles.
Défis
Bien que les technologies existantes puissent déjà résoudre dans une certaine mesure les problèmes de prélèvement et de placement des palettes par AGV, il reste encore des défis à relever et des possibilités de développement :
- Équilibrer l'efficacité et la précision : Une planification plus détaillée est souvent synonyme de coûts informatiques plus élevés. La manière d'améliorer la vitesse de planification tout en garantissant la précision est un domaine qui fait l'objet d'une optimisation continue.
- Adaptabilité aux environnements dynamiques : Comment gérer plus efficacement les obstacles mobiles, les changements de position des palettes ou les postures.
- Fusion de capteurs et précision du positionnement : l'exécution d'une trajectoire de haute précision repose sur un positionnement en temps réel de haute précision et sur la perception de l'environnement.
- Opérations collaboratives multi-AGV : Dans les zones de prélèvement et de placement densément peuplées, comment coordonner efficacement et en toute sécurité plusieurs AGV pour les opérations.
- Méthodes basées sur l'apprentissage : Exploration de l'utilisation de l'apprentissage par renforcement et d'autres méthodes pour permettre aux AGV d'apprendre de manière autonome des stratégies et des trajectoires optimales de prélèvement et de placement.
Conclusion
La préparation et la dépose précises de palettes par des AGV est une tâche complexe et précise dans le domaine de l'automatisation. Elle ne repose pas sur une seule technologie "miracle", mais plutôt sur la combinaison et la coordination intelligentes de plusieurs technologies de planification et d'optimisation des trajets.
Qu'il s'agisse du guidage global, de la planification des points d'arrivée basée sur la perception cinématique de l'Hybrid A* ou des trajectoires fluides obtenues grâce à des techniques telles que les courbes de Bézier, ces technologies tracent collectivement une "voie intelligente" permettant aux AGV de fonctionner de manière sûre, précise et efficace, insufflant ainsi une dynamique puissante à la logistique et à la production automatisées modernes. Au fur et à mesure que la technologie continue de progresser, nous avons toutes les raisons de croire que les futurs AGV feront preuve d'une intelligence et d'une flexibilité encore plus grandes dans les opérations de manutention des palettes.
AiTEN Robotics, dont le siège se trouve à Suzhou, en Chine, est un leader mondial dans le domaine des véhicules industriels autonomes (AMR/AGV) et des solutions d'automatisation logistique. AiTEN Robotics a développé dix séries de produits pour répondre aux besoins de scénarios de manutention complets. AiTEN Robotics a déployé plus de 200 projets dans plus de 30 pays et régions, et de nombreuses entreprises du Fortune 500 lui font confiance dans des secteurs tels que l'automobile, l'alimentation et les boissons, les produits chimiques, les produits pharmaceutiques, la fabrication et la logistique de tiers, en améliorant la sécurité opérationnelle, l'efficacité et la préparation à l'avenir.

