








Robot de manutention AGV couramment utilisé Principes des capteurs et leurs avantages et inconvénients, Introduction à l'application
_%E7%94%BB%E6%9D%BF%201.avif)

Ⅰ. LiDAR
(1) Découvrez comment le LiDAR se verrouille sur des cibles à grande vitesse en temps réel !
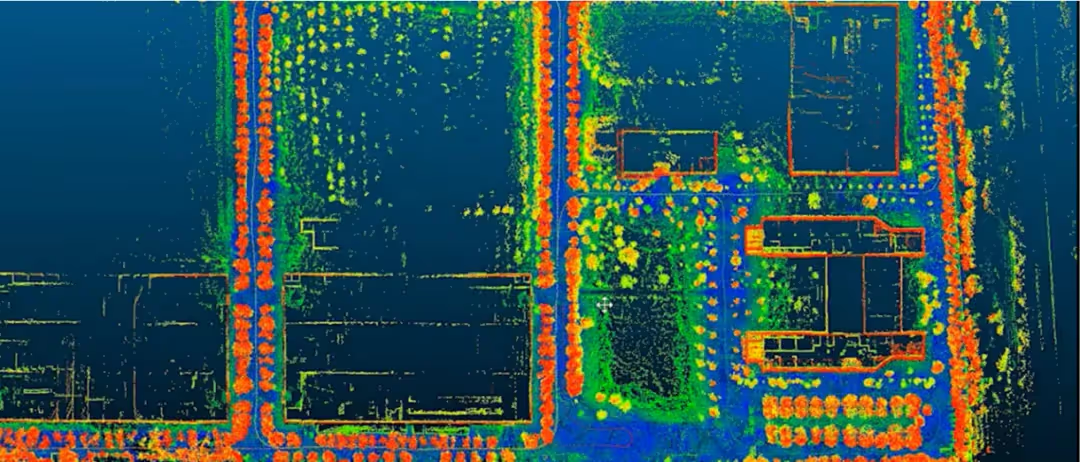
Le LiDAR est un système de capteurs qui détecte des informations sur une cible en émettant un faisceau laser. Son principe de base est le suivant : émettre un laser vers la cible et recevoir le signal réfléchi, déterminer la distance de la cible en calculant le temps d'aller-retour du laser ; en même temps, l'appareil tourne à grande vitesse pour un balayage à 360 degrés, collecte des données denses de nuage de points (un ensemble de coordonnées sur la surface de l'objet) et construit un modèle numérique 2D/3D de l'environnement en temps réel. Le système peut mesurer avec précision la position, la vitesse, la forme et de nombreux autres paramètres de la cible, et est largement utilisé dans les domaines de la conduite autonome, de la cartographie, etc.
1. Les données du nuage de points sont une collection de tous les points de la surface de l'objet détectés par le LiDAR dans la zone de balayage. Chaque point contient deux types d'informations essentielles :
① Caractéristiques de réflectivité
Plage de valeurs : 0-255
Objets à réflexion diffuse : 0-150 (correspondant à une réflectivité de 0% à 100%)
Objets réfléchissants : 151-255 (par exemple métal, verre)
Note: When the object is <2m away from the Mid-360 radar, the reflectivity error is large, and only the total reflection/diffuse reflection type can be judged.
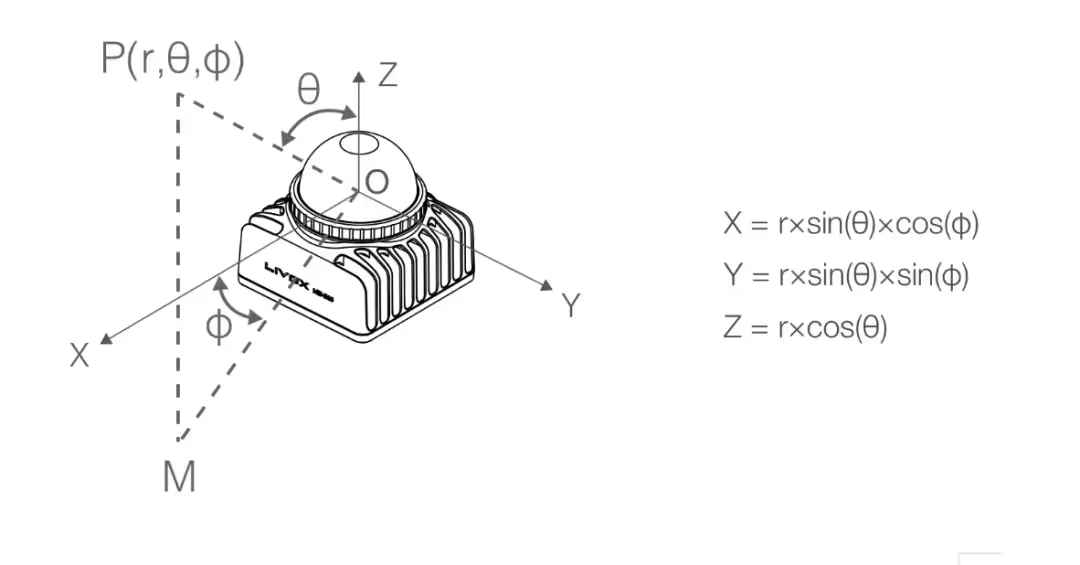
② Coordonnées spatiales
Type de système de coordonnées : Coordonnées cartésiennes (x,y,z) ou coordonnées sphériques (r,θ,φ).
Lorsque la détection est effective : Sortie de la valeur de la coordonnée réelle.
Lorsque la détection n'est pas valide (pas d'objet/ dépassement de la portée > 100m) :
Coordonnées cartésiennes : (0,0,0)
Coordonnées sphériques : (0,θ,φ) (conservent les informations sur l'angle de balayage actuel)
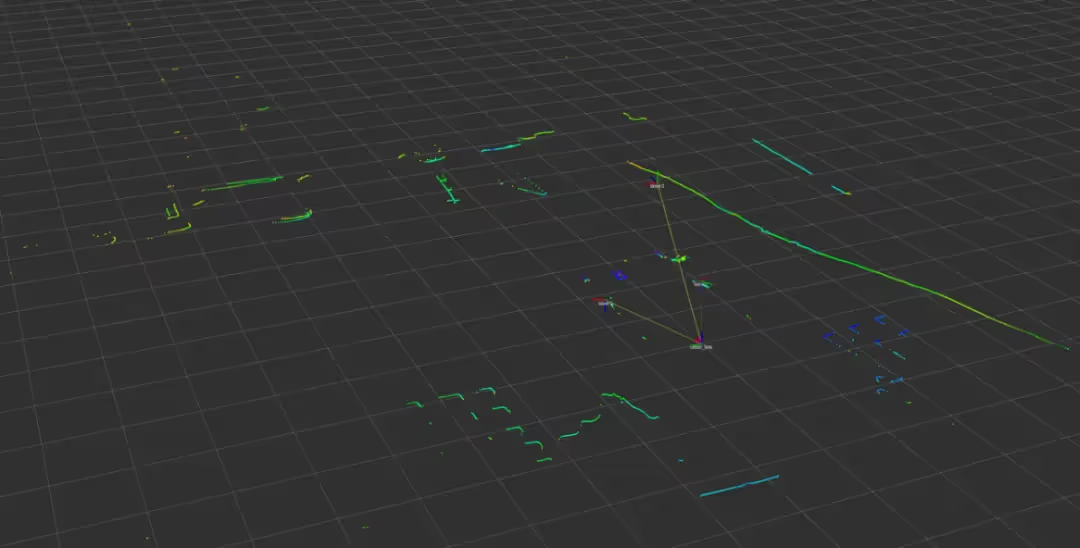
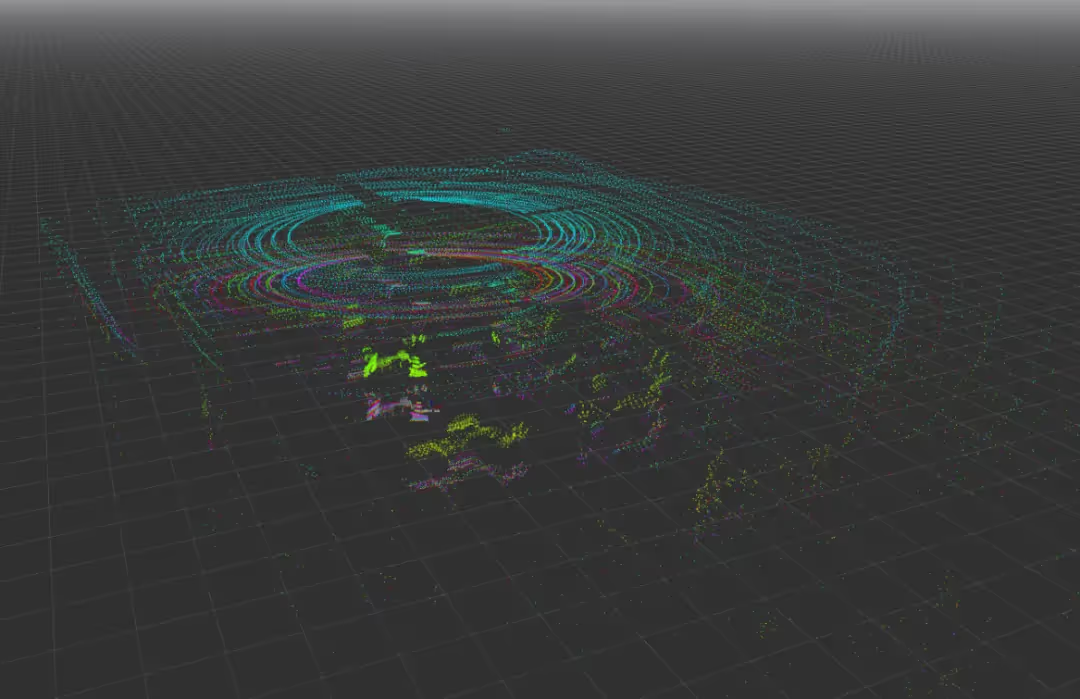
2. Le LiDAR peut être divisé en LiDAR à ligne unique et LiDAR à lignes multiples selon la classification du nombre de lignes. Le système LiDAR à ligne unique fait référence à la source laser émise par le faisceau d'une seule ligne de radar, permettant d'accéder à la carte de balayage planaire en 2D ; le système LiDAR à lignes multiples fait référence à l'émission et à la réception simultanées de plusieurs faisceaux de radars rotatifs laser, le marché étant actuellement constitué de 4 lignes, 8 lignes, 16 lignes, 32 lignes, 64 lignes, et 128 lignes de points. Le LiDAR multiligne peut reconnaître les informations relatives à la hauteur d'un objet et obtenir un balayage en 3D de l'environnement. Une visualisation du nuage de points 2D et 3D est présentée dans la figure.
(2) Pourquoi la navigation devine-t-elle toujours la direction que vous voulez prendre ?
La navigation laser est une méthode de navigation couramment utilisée dans les systèmes AGV. Selon son principe de navigation, les AGV peuvent se déplacer librement dans la zone de navigation et se localiser avec précision ; dans la zone de navigation, la trajectoire du véhicule peut être modifiée à tout moment en fonction des besoins réels, ce qui permet de tirer pleinement parti de la flexibilité des AGV et d'améliorer l'efficacité de la production. De nombreux systèmes doivent être mis en œuvre dans les conditions existantes du site, ce qui est particulièrement adapté aux systèmes AGV à navigation laser.
1. Les principes fondamentaux de la navigation laser peuvent être résumés en deux grands principes :
① Construction d'une carte (apprendre l'environnement pour la première fois)
Lorsque l'AGV démarre pour la première fois, il scrute son environnement de tous les côtés à l'aide du LiDAR, comme s'il balayait une pièce avec un pointeur laser.
Grâce à la technologie SLAM (Autonomous Localisation + Mapping), il enregistre la position des objets fixes tels que les murs et les équipements pour créer une carte numérique de l'environnement.
②Positionnement en temps réel (recherche de position lors de la navigation)
Pendant que l'AGV se déplace, le LiDAR scanne en permanence et acquiert un nuage de points "instantané" de l'environnement en temps réel.
Les données en temps réel sont comparées à la carte stockée (comme dans le jeu "Trouvez la différence") et l'algorithme calcule la position et l'orientation précises de l'AGV.

2. Fonctions de navigation laser :
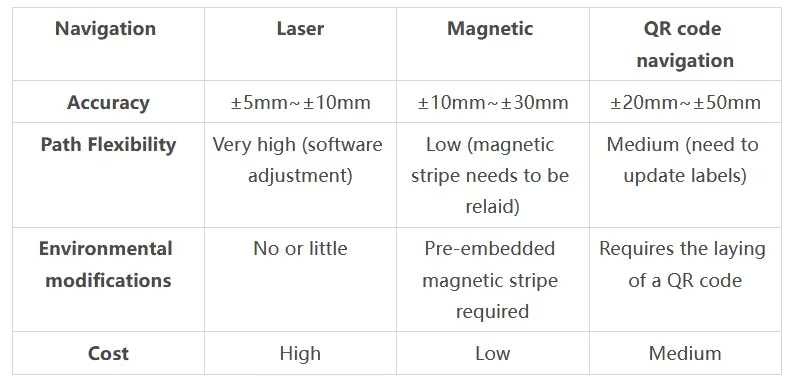
Positionnement et navigation de haute précision, convenant aux scènes ayant des exigences strictes en matière de précision, telles que l'empilage de marchandises ; forte adaptabilité à l'environnement, les scènes complexes ont une certaine compatibilité, peuvent faire face aux changements d'éclairage, aux légères inégalités du sol et à d'autres interférences, mais il faut éviter qu'une lumière forte n'éclaire directement le LiDAR, ce qui pourrait nuire à la précision de la télémétrie ; pas de limitation de trajectoire fixe, contrairement au guidage magnétique ou à la navigation par code bidimensionnel, la navigation laser n'a pas besoin d'être précédée de bandes magnétiques ou d'étiquettes, le logiciel permet de modifier librement la trajectoire ; haute intelligence et évolutivité, coopération multi-véhicules, par le biais du système central de planification pour partager la carte et les informations de position en temps réel, pour réaliser des opérations coopératives multi-VAG, telles que l'évitement de trajectoires croisées, l'attribution de tâches.
Comparer avec d'autres méthodes de navigation comme indiqué dans le tableau :
(3) Comment le réflexe conditionné de l'IA d'éviter les obstacles en quelques secondes se produit-il ?
1. Principe d'évitement des obstacles par laser
Grâce au balayage en temps réel du radar laser pour générer des données de nuages de points environnementaux, les premiers algorithmes intelligents seront des nuages de points adjacents agrégés en groupes d'obstacles, distinguant les objets statiques (position inchangée) des objets dynamiques (changement de position, trajectoire prévisible) ; en même temps, combiné avec le balayage simultané de plusieurs données radar, l'analyse unifiée centrée sur le corps de l'environnement environnant, le corps de tous les nuages de points à l'extérieur de la voiture est marqué comme un obstacle, la planification en temps réel de chemins sûrs pour éviter le danger.
2. Type d'évitement d'obstacles
LiDAR à ligne unique (p. ex. série SICK TIM) : peu coûteux, il est utilisé pour l'évitement d'obstacles planaires en 2D.
LiDAR multiligne (par exemple Livox Mid360, Velodyne VLP-16) : Évitement d'obstacles en 3D, détection d'informations sur la hauteur dans l'espace pour éviter les objets bas ou en surplomb.
3. Emplacement du radar d'évitement d'obstacles
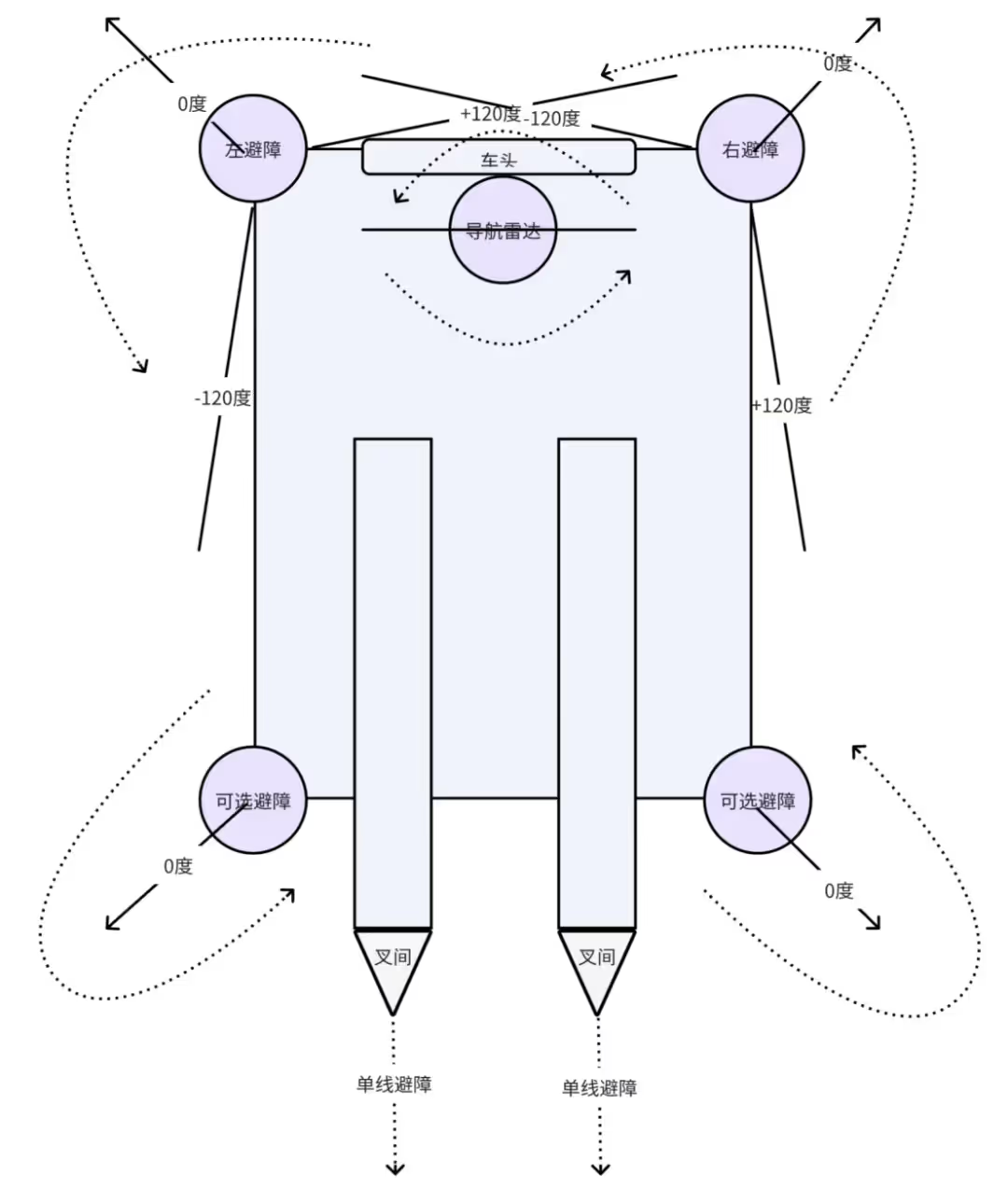
Il sert principalement à éviter les obstacles à l'avant et à l'arrière, à assurer la protection latérale des deux côtés de la carrosserie et à surveiller le sommet du véhicule, comme le montre la figure. L'avant et l'arrière du véhicule sont généralement installés aux quatre coins de la carrosserie, et le radar est incliné vers l'extérieur à l'avant du radar. La protection latérale des deux côtés de la carrosserie est généralement couverte par le champ de balayage du radar aux quatre coins. Les systèmes de surveillance globale de pointe utilisent généralement un radar de navigation pour éviter les obstacles en même temps.
Si le radar se trouve directement à l'avant (0 degré), la portée pour couvrir le bord du corps est de plus ou moins 135 degrés, mais en raison de l'interférence du corps, il est nécessaire de filtrer la partie proche du corps, de sorte que la portée du champ de vision est généralement fixée à plus ou moins 120 degrés. Entre les fourches, on ne détecte généralement qu'une seule ligne sans éviter les obstacles.
4. Évitement des obstacles dans l'espace à 360 degrés
L'emplacement de l'installation du radar 2D et 3D doit garantir que la portée de balayage de la couverture globale du corps tourne autour d'un cercle.
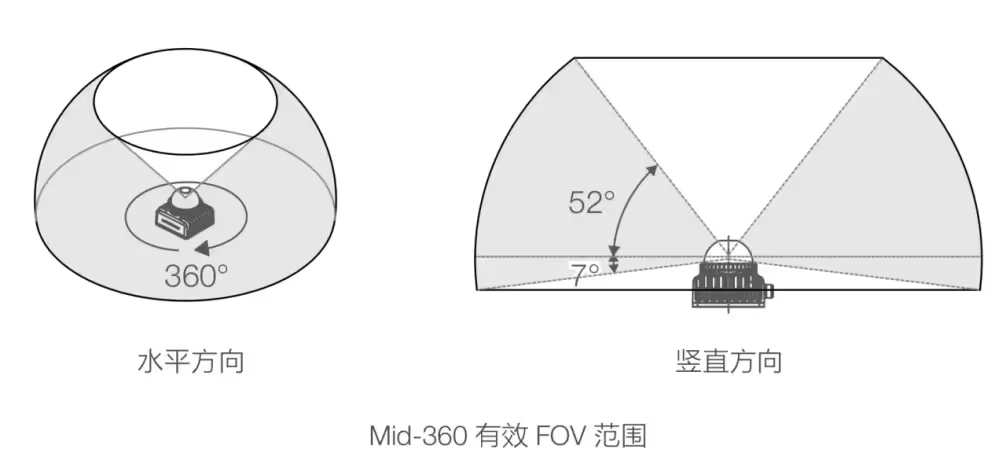
Un radar 3D pour mid360 par exemple, doit connaître la définition de ses coordonnées et la couverture maximale de la plage de balayage, comme le montre la figure.
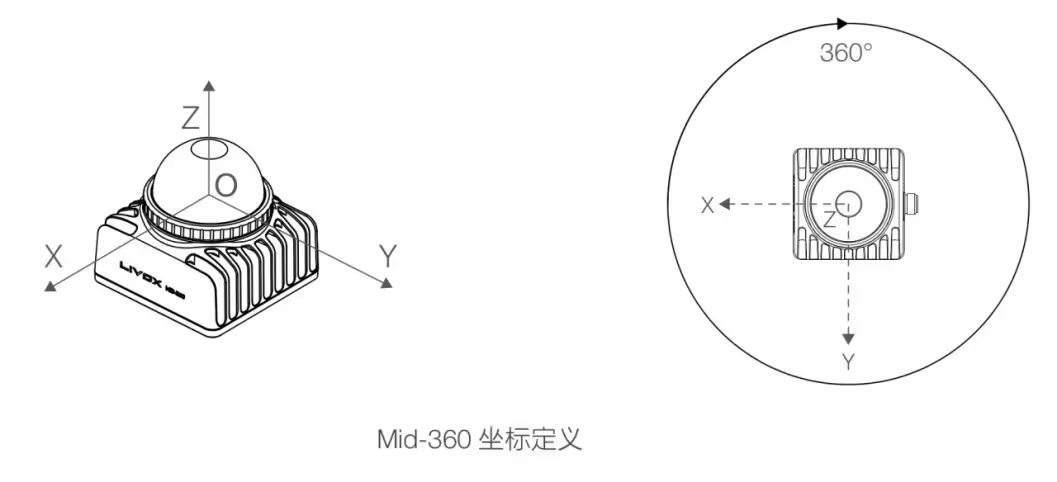
Le schéma par défaut est le suivant : un radar 3D est installé verticalement ou incliné vers le haut sous le radar de navigation avant, un radar 3D est installé verticalement ou incliné vers le haut des deux côtés de la carrosserie, un radar 3D est installé verticalement ou incliné vers le haut sous les fourches à l'arrière de la carrosserie, et l'OI optoélectronique est utilisé pour l'évitement des obstacles entre les fourches.
5. Avantages et limites techniques
Avantage : Haute précision : précision de la portée au millimètre près, bien supérieure à celle des capteurs à ultrasons ou à infrarouge. Anti-interférence : non affecté par la lumière ambiante, la poussière, le champ électromagnétique (par rapport aux capteurs de vision). Réponse rapide : la fréquence de balayage est généralement de 10Hz~50Hz, adaptée aux AGV à grande vitesse (≥1,5m/s).
(4) Navigation laser dans les robots de manutention
1. Aperçu du principe de la perception laser :
Après avoir obtenu les données du nuage de points à l'aide d'un radar 3D, il filtre d'abord les informations parasites telles que la poussière et la réflexion du verre, puis extrait les principales caractéristiques structurelles telles que les bords des étagères, les angles des murs et les trous de fourche des palettes à l'aide d'algorithmes intelligents. Enfin, il cartographie avec précision les objets cibles dans le système de coordonnées, fournit les informations positionnelles et gestuelles et construit la carte de l'environnement local avec la sémantique, afin de parvenir à la perception intelligente de "voir les objets et de comprendre la scène". Perception intelligente.
2. Identification et positionnement des palettes
3. Alignement des fourches

4. Empilage automatique

5. Avantages et limites techniques
Avantage : haute précision : La précision de la télémétrie laser peut atteindre ±1 mm, ce qui répond aux besoins de l'exploitation industrielle des palettes. Résistance aux interférences de la lumière ambiante : Comparé aux solutions de vision, le laser n'est pas affecté par les changements de lumière. Temps réel élevé : fréquence de balayage de 10Hz~50Hz, adaptée aux scénarios logistiques à grande vitesse.
Limites : Coût élevé : Le prix du LiDAR est nettement plus élevé que celui du radar à ultrasons, en particulier du radar multiligne. Impact des matériaux spéciaux : les objets absorbant la lumière noire ou les objets à réflexion spéculaire peuvent réduire la fiabilité de la détection. Complexité de calcul : le traitement des nuages de points en temps réel nécessite une puissance de calcul élevée (GPU intégré ou processeur dédié).
Ⅱ. Appareil photo
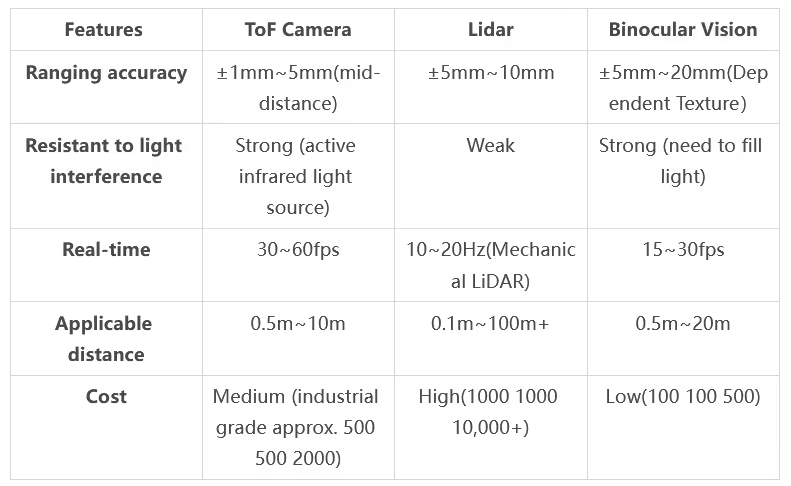
(1) Comment la ToF utilise les ondes lumineuses pour réaliser des "mesures spatiales" à l'échelle du millimètre
Le temps de vol (ToF) est l'une des trois principales technologies d'imagerie 3D (les deux autres étant la lumière structurée et la vision stéréo binoculaire). Le principe consiste à obtenir directement l'information sur la distance (profondeur) d'un objet en émettant une lumière proche de l'infrarouge et en calculant le temps de trajet aller-retour de la lumière. Par rapport à d'autres technologies, la ToF présente les avantages d'un calcul simple, d'une forte anti-interférence et d'une mesure à longue distance. Elle est donc largement utilisée dans les caméras arrière des téléphones portables (par exemple, Huawei/OPPO/Apple), l'automatisation industrielle, la navigation des véhicules autoguidés et la préhension des robots.
1. dtof
Le système dToF (Direct Time-of-Flight Ranging) se compose de trois éléments essentiels :
① VCSEL : émet des impulsions laser de l'ordre de la nanoseconde ;
② SPAD (Single Photon Avalanche Diode) : détecte les signaux lumineux réfléchis au niveau d'un seul photon ;
③ TDC (Time-to-Digital Converter) : enregistre avec précision le temps de trajet aller-retour de l'impulsion optique.
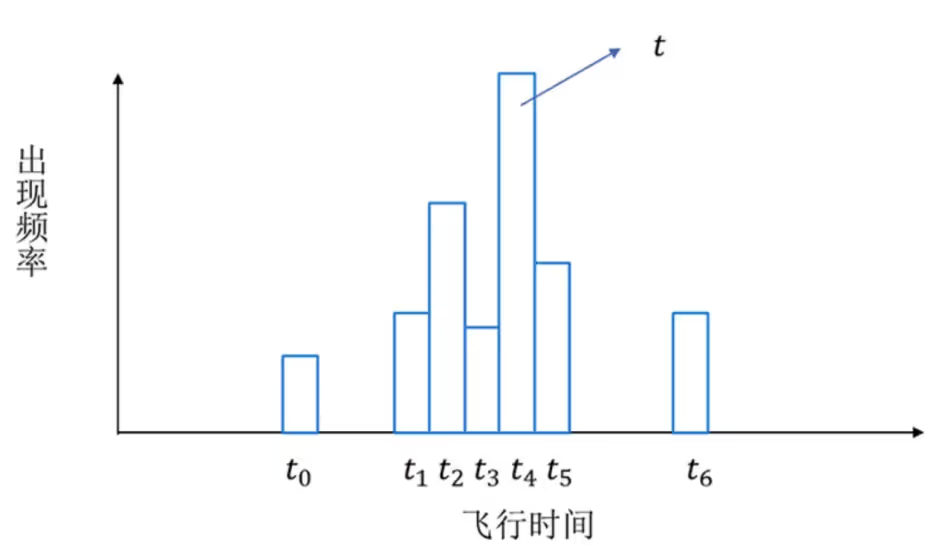
Le principe de fonctionnement est le suivant : émission et réception de N impulsions dans une seule trame, enregistrement du temps de vol à chaque fois par le PMH et génération d'un histogramme, et prise en compte du temps t de la fréquence la plus élevée pour calculer la profondeur (d = ct/2). Cette technique améliore considérablement la capacité anti-brouillage grâce à l'optimisation statistique et permet de mesurer la profondeur avec une grande précision.
Bien que le principe du dToF semble très simple, il est difficile d'atteindre un haut degré de précision. Outre les exigences très élevées en matière de précision pour la synchronisation de l'horloge, il existe également des exigences élevées en matière de précision du signal d'impulsion. Les photodiodes ordinaires peuvent difficilement répondre à ces exigences. Le composant central du dToF, le SPAD, n'est pas fabriqué par beaucoup de fabricants en raison de la complexité du processus de production, et il est difficile à intégrer. Par conséquent, peu de fabricants font actuellement des recherches sur le dToF, et davantage sur l'iToF.
2. itof
Le concept d'iToF correspond au dToF, et son nom complet est temps de vol indirect, ce qui se traduit directement par temps de vol indirect de la lumière. L'iToF transmet des signaux lumineux infrarouges modulés dans la scène, puis le capteur reçoit les signaux lumineux réfléchis par les objets à mesurer dans la scène, et calcule ensuite la différence de phase entre le signal transmis et le signal reçu sur la base de la charge accumulée pendant le temps d'exposition (intégration) pour obtenir la profondeur de l'objet cible. profondeur de l'objet. Comme le montre la figure.
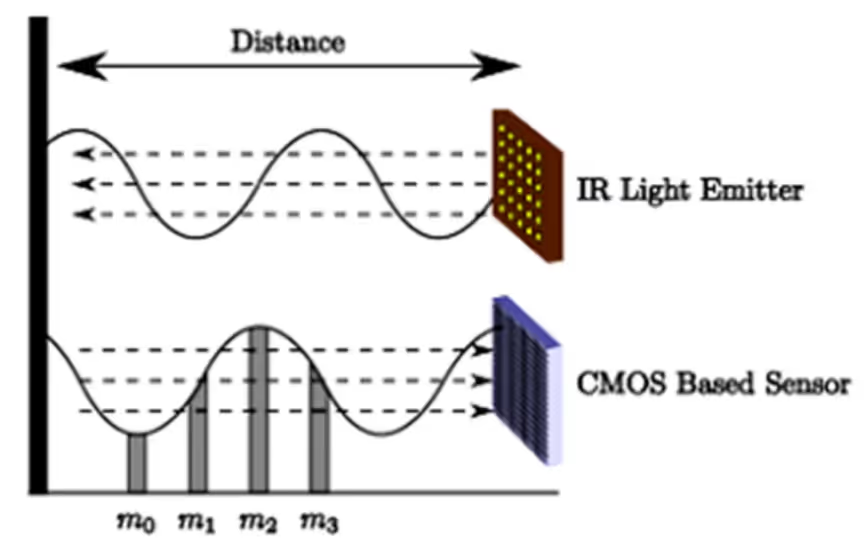
Les principaux composants du module iToF sont un VCSEL et un capteur d'image. Le VCSEL émet une lumière infrarouge modulée à une fréquence spécifique. Le capteur d'image reçoit la lumière réfléchie et effectue une conversion photoélectrique pendant le temps d'exposition (intégration). À la fin de l'exposition (intégration), les données sont lues et transmises par un convertisseur analogique-numérique à une unité de calcul, qui calcule le déphasage de chaque pixel. iToF calcule la profondeur à l'aide d'un algorithme à 4 échantillonnages, qui utilise 4 échantillons avec des retards de phase de 0°, 90°, 180° et 270° pour calculer la profondeur. Comme le montre la Fig.

3. Génération de cartes de profondeur
La vision stéréo binoculaire utilise les caméras gauche et droite pour photographier des objets de manière synchronisée et utilise la parallaxe (la différence de position des objets dans l'image) pour calculer la profondeur, de manière similaire à la perception de la distance par l'œil humain ; tandis que la caméra ToF enregistre directement la valeur de la distance de temps de vol de chaque pixel, générant une carte de profondeur à haute résolution (par exemple, 640×480), et la combinant avec la caméra RVB pour construire un nuage de points 3D coloré, les deux étant les technologies de base pour la modélisation de l'environnement en 3D.
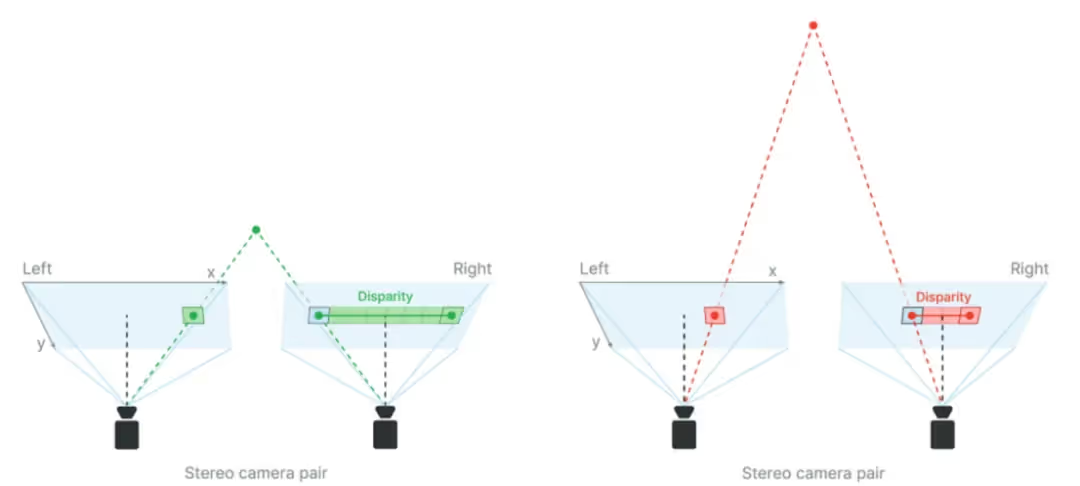
Principe de parallaxe : formule schématique de calcul de la carte de profondeur :

Une distance de base plus grande ou une longueur focale plus grande produira des profondeurs plus importantes à parallaxe égale, ce qui signifie une meilleure précision de la profondeur. La longueur focale est la distance entre l'objectif de l'appareil photo et le capteur d'image. Plus la distance focale est grande, plus le champ de vision est étroit. Par conséquent, pour obtenir une perception de la profondeur à longue distance, vous pouvez augmenter la distance de base et/ou réduire le champ visuel.
(2) Application de la caméra ToF dans le domaine de l'AGV
1. Évitement des obstacles et protection de la sécurité
Évitement dynamique des obstacles : détection en temps réel des obstacles dans un rayon de 5 m (personnes, chariots élévateurs, étagères, etc.), déclenchant une décélération ou un arrêt d'urgence. Zone de sécurité à plusieurs niveaux (par exemple, avertissement à l'extérieur de 1 m, arrêt d'urgence à 0,3 m). Détection des obstacles bas : Détection des palettes, des caisses de marchandises, etc. sur le sol pour éviter que l'AGV n'entre en collision ou ne s'écrase.
2. Identification des palettes et prélèvement à la fourche
Positionnement des palettes : Identifier la position du trou de fourche de la palette grâce à une carte de profondeur, avec une précision de ±3 mm, en s'adaptant aux différents types de palettes (bois, plastique, métal). Prélèvement automatique des fourches : Combinée au contrôle des mouvements de l'AGV, la position du bras de la fourche est ajustée pour garantir une insertion précise.
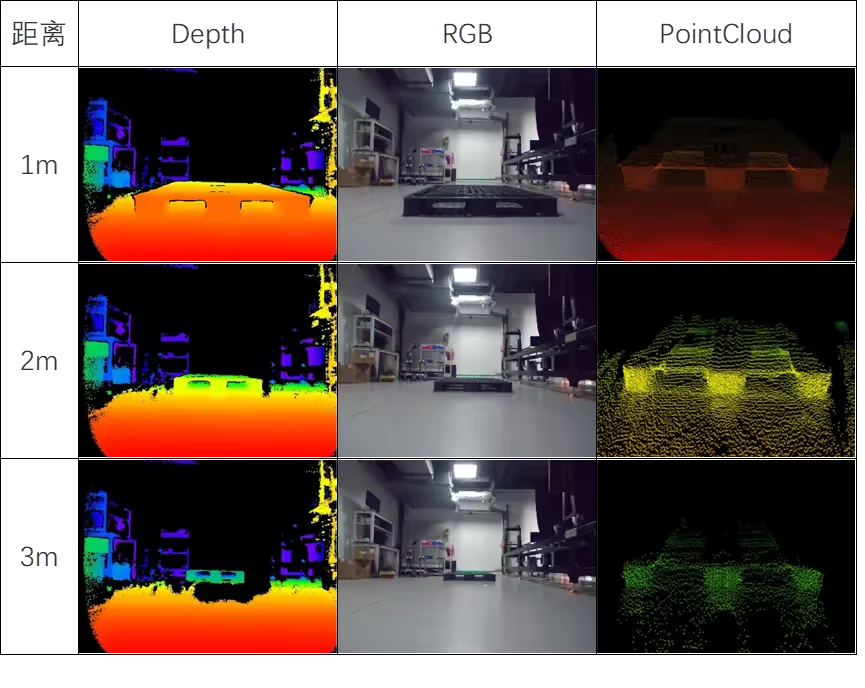
Les résultats de la détection de la palette noire par la caméra ToF sont illustrés dans la figure suivante, la profondeur est la carte de profondeur, RVB est la carte de couleur, PointCloud est le nuage de points, le nuage de points original est traité par l'algorithme de perception, et la sortie finale est la position bidimensionnelle de la palette par rapport au centre de la carrosserie du véhicule.
Détection de l'empilement : Mesure de la hauteur de la cargaison pour assurer la stabilité de l'empilage multicouche.
Mesure du volume : Calculer la taille des colis (L x L x H) pour le tri logistique.
(3) Avantages techniques des caméras ToF
Ⅲ. Autres transducteurs
(1) Capteur à ultrasons
1. Principe : émission d'une impulsion ultrasonique de 40kHz-200kHz, réception du signal réfléchi pour calculer la distance.
2. Applications :
Évitement d'obstacles/détection de lieux pour les véhicules autoguidés : angle de faisceau typique de 15°~30° (couverture d'une grande distance, faible précision) ;
Détection d'objets transparents (verre/acrylique) ;
Des dispositifs multiples doivent empêcher la diaphonie et une zone aveugle (5-20 cm) doit être complémentaire à l'infrarouge/au laser.
3. Les avantages :
Résistant aux interférences lumière/poussière/brouillard, il s'adapte à un environnement industriel complexe ;
Coût extrêmement faible (10~100 $ par unité), longue durée de vie (>100 000 fois) ;
Sans contact et sans usure.
4. Inconvénients :
Faible précision (±1~5cm, influence de la température et de l'humidité), nécessite la fusion de plusieurs capteurs ;
Réponse dynamique lente (50~100ms), non applicable aux scènes à grande vitesse (>1,5m/s) ;
interférence de la réflexion par trajets multiples, dépendant des algorithmes (tels que RANSAC), filtrage du bruit
(2) Unité de mesure inertielle (IMU)
1. Le principe :
Il se compose d'un gyroscope (qui mesure la vitesse angulaire) et d'un accéléromètre (qui mesure l'accélération linéaire), ainsi que d'un magnétomètre partiellement intégré pour faciliter l'étalonnage du cap ;
Sortie des angles d'Euler au moyen d'algorithmes de résolution d'attitude et de filtrage (par exemple, filtrage de Kalman).
2. Applications :
Navigation AGV : fusion des données de l'encodeur pour compenser la dérive du cap et améliorer la précision du positionnement ;
Contrôle dynamique de l'attitude : surveillance en temps réel de l'angle d'inclinaison des fourches et de l'angle de roulis pour ajuster l'attitude de la cargaison ;
Positionnement sans infrastructure : navigation autonome dans les tunnels, à l'intérieur et dans d'autres scénarios sans GPS.
3. Les avantages :
Entièrement autonome, ne dépendant pas de signaux externes (GPS/réflecteurs) ;
Mises à jour à haute fréquence (jusqu'à 1kHz), en temps réel ;
Résistant à la lumière, à la poussière et aux interférences électromagnétiques (à l'exception des magnétomètres).
4. Inconvénients :
Erreur accumulée : la dérive du gyroscope nécessite une correction par fusion de plusieurs capteurs (vision/odomètre) ;
Dépendance à l'égard de l'étalonnage : étalonnage stationnaire du biais zéro requis au moment de la mise en service, entretien régulier ;
Alignement initial : l'initialisation de l'attitude horizontale statique ou connue est requise au moment de la mise en service.
(3) Codeur à câble
1. Principe : Mesure du déplacement par la combinaison d'une transmission mécanique et d'un codeur : le fil de traction (fil/fibre d'acier) se déplace et se rétracte avec l'objet, entraînant la rotation du codeur interne et convertissant le déplacement en un signal électrique (formule : déplacement = résolution du codeur x nombre d'impulsions x circonférence de la roue).
2. Applications : y compris le contrôle de la précision des fourches des AGV (précision de ±1 mm), le nivellement des rampes et l'étalonnage des distributeurs de conteneurs ;
3. Avantages : très grande précision (±0,01 mm), anti-interférence (poussière/électromagnétique), longue course (jusqu'à 50 m) et installation flexible ;
4. Inconvénients : l'usure mécanique nécessite un entretien régulier, les mouvements à grande vitesse sont facilement sujets à l'instabilité (> 1 m/s) et ne permettent que des mesures unidirectionnelles ; les degrés de liberté multiples nécessitent la combinaison de plusieurs dispositifs.
(4) Capteur de distance photoélectrique
1. Principe : émission de lumière infrarouge et détection de l'intensité réfléchie ; plus la distance est faible, plus le signal réfléchi est fort (pas de valeur de distance précise, seulement un jugement de seuil).
2. Application : Généralement utilisé pour l'évitement d'obstacles simples ou la détection sur place.
3. Avantages : coût très faible. Mesure sans contact : évite l'usure mécanique, longue durée de vie. Réponse rapide : détection à la milliseconde. Anti-interférence électromagnétique : convient aux environnements industriels complexes.
4. Inconvénients : la couleur de l'objet et le matériau de surface ont une grande influence. Interférences optiques : une lumière forte, une réflexion spéculaire et des objets transparents affectent la précision. Limites de la portée : la valeur limite générale de la portée est bien inférieure à celle du laser.
Conclusion
Ce guide complet explore la manière dont les technologies de pointe en matière de capteurs améliorent l'intelligence et l'agilité des véhicules à guidage automatique (AGV).
Ensemble, ces technologies constituent la base sensorielle de solutions de manutention intelligentes, réactives et hautement automatisées.
En tant qu'entreprise dans le domaine des solutions logistiques intelligentes, AiTEN Robotics se concentre toujours sur les scénarios d'"usine intelligente", intègre profondément l'innovation technologique et la demande de l'industrie, et a fourni des services complets à plus de 200 clients manufacturiers dans le monde entier : en s'appuyant sur une gamme complète de matrices de produits de robots de manutention pour couvrir divers scénarios de manutention, un système de planification intelligent au niveau de l'industrie auto-développé pour réaliser une collaboration efficace de l'équipement multiple, et un système de planification intelligent au niveau de l'industrie auto-développé pour réaliser une collaboration efficace de l'équipement multiple. Nous avons fourni des services complets à plus de 200 clients industriels dans le monde entier : en nous appuyant sur une gamme complète de robots de manutention pour couvrir divers scénarios de manutention, sur un système de programmation intelligent développé par l'industrie elle-même pour assurer une collaboration efficace entre plusieurs équipements, et sur un système de service de cycle de vie complet couvrant la planification avant-vente, le déploiement et la mise en œuvre jusqu'à l'optimisation de l'exploitation et de la maintenance, nous avons aidé les entreprises à réaliser la transformation intelligente de la logistique et avons continué à donner à l'industrie manufacturière les moyens de se moderniser numériquement et de développer la qualité.

