








Desvelar el algoritmo de planificación dinámica de trayectorias en vehículos AGV
_%E7%94%BB%E6%9D%BF%201.avif)
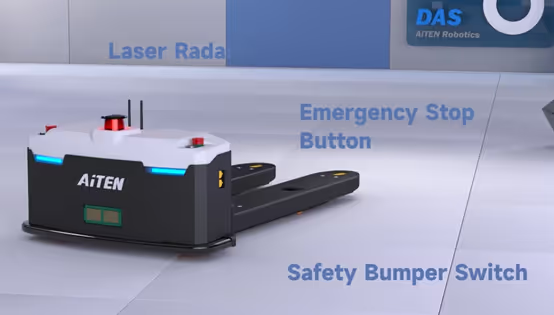
En los almacenes, la logística y la fabricación modernos, los vehículos de guiado automático (AGV) son cada vez más comunes. Como hormigas trabajadoras, se desplazan por entornos complejos de forma autónoma y llevan a cabo con eficacia las tareas de manipulación de materiales. Una de las principales tecnologías que permiten a los AGV lograr una navegación inteligente es la planificación de trayectorias. Especialmente cuando el entorno no es estático, las capacidades de planificación dinámica de rutas resultan cruciales. Este artículo profundiza en varios de los principales algoritmos de planificación dinámica de trayectorias (como A, Dijkstra, RRT, etc.) y explica cómo están teniendo un impacto significativo en el sector de los vehículos autoguiados.
¿Por qué es necesaria la planificación dinámica de rutas?
La planificación tradicional de trayectorias estáticas asume que el entorno es completamente conocido y permanece invariable mientras el AGV realiza sus tareas. Sin embargo, el mundo real está lleno de variables:
- Aparición repentina de obstáculos temporales (como carga caída, peatones u otros vehículos).
- Cambio de las zonas de control del tráfico
- Ajustes temporales de los puntos o tareas objetivo
En estas situaciones, los AGV deben ser capaces de detectar cambios en su entorno en tiempo real y replanificar rápidamente sus rutas. Aquí es donde entra en juego la planificación dinámica de rutas. Proporciona a los vehículos AGV la inteligencia necesaria para adaptarse a las circunstancias cambiantes, garantizando que puedan seguir funcionando de forma segura y eficiente en entornos complejos y dinámicos.
Análisis de los principales algoritmos de planificación de rutas
1. Algoritmo de Dijkstra
El algoritmo de Dijkstra es un algoritmo clásico de búsqueda en grafos utilizado para encontrar el camino más corto desde un único nodo origen a todos los demás nodos de un grafo.
Idea central:
Partiendo del nodo de origen, el algoritmo se propaga hacia el exterior como las ondas en el agua. Cada vez, visita el nodo no visitado más cercano al nodo de origen y actualiza las distancias a sus vecinos.
Proceso:
- Inicialización: Establecer la distancia desde el punto inicial a 0 y las distancias desde otros puntos a infinito. Crear una cola prioritaria de nodos a visitar (ordenados por distancia).
- Iteración: Elimina de la cola el nodo u con la menor distancia.
- Relajación: Para cada vecino v de u, si el camino de u a v es más corto, actualiza la distancia de v y añádelo a la cola.
- Marcar: Marcar u como visitado.
- Repetir: Continuar hasta que se recupere el nodo de destino o la cola esté vacía.
Aplicación AGV:
- Ventajas: Garantiza encontrar el camino más corto global (cuando los pesos de las aristas son no negativos).
- Desventajas: Gran rango de búsqueda, sin direccionalidad, baja eficiencia computacional (especialmente en mapas grandes). Los obstáculos dinámicos obligan a recalcular la trayectoria global, lo que reduce el rendimiento en tiempo real.
- Posicionamiento: A menudo se utiliza como base para otros algoritmos (como A*) o en entornos sencillos.
2. Algoritmo A
El algoritmo A* (A-Star) es una optimización del algoritmo de Dijkstra. Introduce información heurística para guiar la dirección de búsqueda y así encontrar el objetivo más rápidamente.
Idea central: Al seleccionar el siguiente nodo a visitar, considera simultáneamente lo siguiente:
- g(n): El coste real del camino desde el punto inicial hasta el nodo n.
- h(n): El coste estimado desde el nodo n hasta el objetivo (una función heurística, como la distancia Manhattan/Euclídea).
- Función de evaluación: f(n) = g(n) + h(n)
- Requisitos clave: h(n) debe satisfacer la admisibilidad (valor estimado ≤ valor real) y la coherencia para garantizar la búsqueda de la solución óptima.
Proceso: Similar al de Dijkstra, pero la cola de prioridad se ordena por f(n), y los nodos con la f(n) más pequeña tienen prioridad de expansión, haciendo la búsqueda más direccional hacia la meta.
Aplicación AGV:
- Ventajas: Garantiza la trayectoria óptima cuando la función heurística cumple las condiciones y suele ser mucho más eficiente que Dijkstra. Muy utilizado en la planificación global de rutas de AGV.
- Desventajas: El rendimiento se ve influido por la elección de la función heurística; el consumo de memoria puede ser elevado; sigue siendo necesario volver a planificar cuando el entorno cambia con frecuencia.
- Variantes dinámicas: Para hacer frente a entornos dinámicos, existen algoritmos como D*, LPA* y D* Lite. Estos algoritmos pueden actualizar las rutas de forma incremental (en lugar de recalcularlas por completo) cuando cambia el entorno, lo que mejora significativamente la velocidad de respuesta. D* Lite es un algoritmo muy utilizado para la evitación dinámica de obstáculos en vehículos autoguiados.

3. Algoritmo RRT
RRT* (Rapidly-exploring Random Tree Star) es un algoritmo de planificación de trayectorias basado en el muestreo que resulta especialmente adecuado para espacios de gran dimensión y restricciones complejas (como la cinemática de los vehículos).
Idea central:
Mediante el muestreo aleatorio de puntos en el espacio de estados, el algoritmo hace crecer progresivamente un árbol que parte del origen para explorar el espacio. RRT* es una versión optimizada de RRT, que incorpora un paso de recableado para permitir que el camino se aproxime asintóticamente a la optimalidad (cuantos más puntos de muestreo, más se acerca el camino a la optimalidad).
Proceso:
- Muestreo: Generar aleatoriamente un punto x_rand en el espacio de estados.
- Encontrar el vecino más cercano: Localiza en el árbol el nodo x_más cercano a x_rand.
- Extender (Dirigir): Extiende una longitud de paso desde x_más cercano hasta x_más lejano (evitando obstáculos) para obtener el nuevo nodo x_nuevo.
- Seleccionar nodo padre (RRT* específico): Busca nodos cercanos a x_nuevo y selecciona el nodo x_min que minimiza el coste total del camino desde el punto inicial hasta x_nuevo como nodo padre (deben evitarse colisiones).
- Rewire (RRT* específico): Busca nodos cercanos a x_nuevo. Si la conexión a través de x_nuevo reduce el coste total de la ruta, actualiza los nodos padre de estos nodos a x_nuevo.
- Añadir: Añade x_nuevo y sus aristas conectadas al árbol.
- Repita: Continúe hasta que el árbol se expanda hasta las proximidades de la zona objetivo.
Aplicación AGV:
- Ventajas: Gran capacidad para manejar estados de alta dimensión (pose, velocidad, etc.) y restricciones complejas; no se requiere un mapa explícito del entorno; completitud probabilística (si existe un camino, finalmente se encontrará); la RRT tiene optimalidad asintótica.
- Desventajas: Las trayectorias no son estrictamente óptimas (a menos que se utilice un muestreo infinito); las trayectorias pueden no ser suaves (se requiere postprocesamiento); el rendimiento es sensible a los parámetros; la convergencia puede ser lenta.
- Variantes dinámicas: por ejemplo, la RRT dinámica, que logra la replanificación eliminando/actualizando partes del árbol que chocan con obstáculos dinámicos y siguen creciendo.

Aplicaciones prácticas de la planificación dinámica de rutas en vehículos AGV
Escenarios de aplicación para evitar obstáculos con AGV
En las aplicaciones reales de AGV, rara vez se utiliza un único algoritmo, sino una combinación de algoritmos:
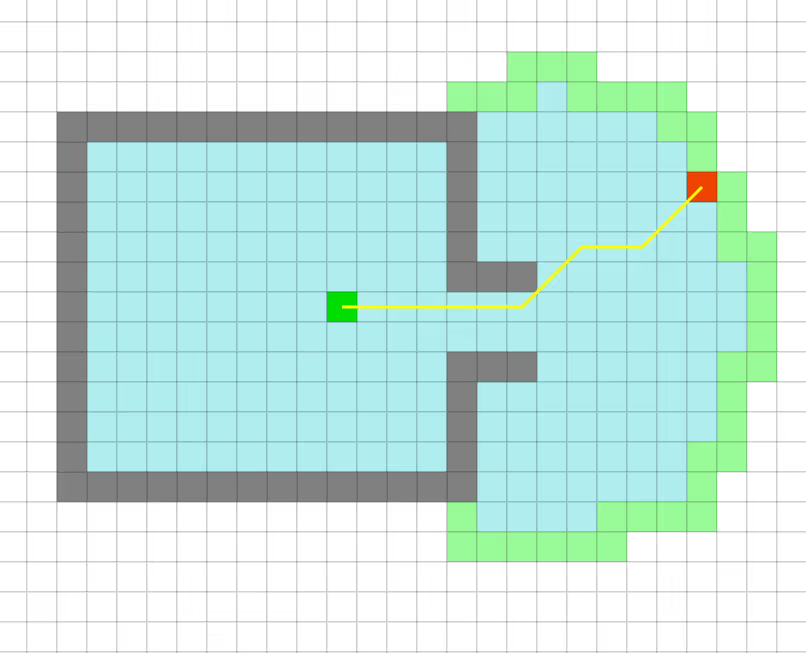
1. Planificación global de trayectorias:
Utilizando A* o sus variantes (como D-Lite) o, a veces, una versión optimizada del algoritmo de Dijkstra, se planifica un camino global óptimo o subóptimo desde el punto de partida hasta el de destino en un mapa conocido. Este camino suele ser bastante macro.
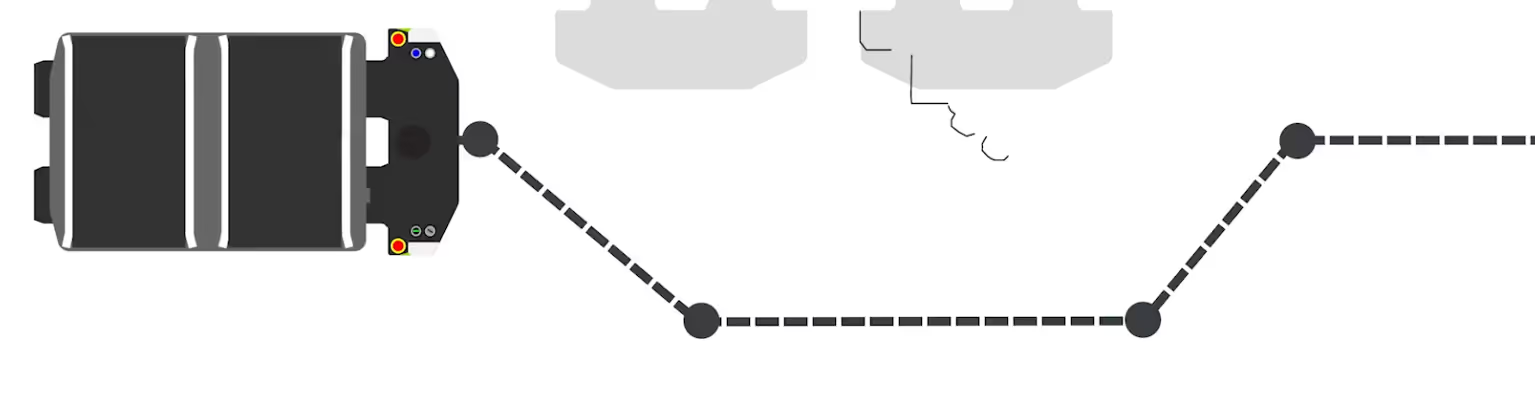
2. Planificación local de trayectorias/Evitación dinámica de obstáculos:
Mientras sigue la trayectoria global, el AGV utiliza sensores (como lidar o cámaras) para detectar continuamente el entorno circundante. Una vez que se detecta un obstáculo inesperado (estático o dinámico), el planificador local (que puede basarse en DWA - Dynamic Window Approach, TEB - Timed Elastic Band, o una variante de A/RRT con replanificación rápida) interviene para generar una trayectoria local de evitación de obstáculos a corto plazo, segura y limitada por la cinemática del vehículo bajo la guía de la trayectoria global.

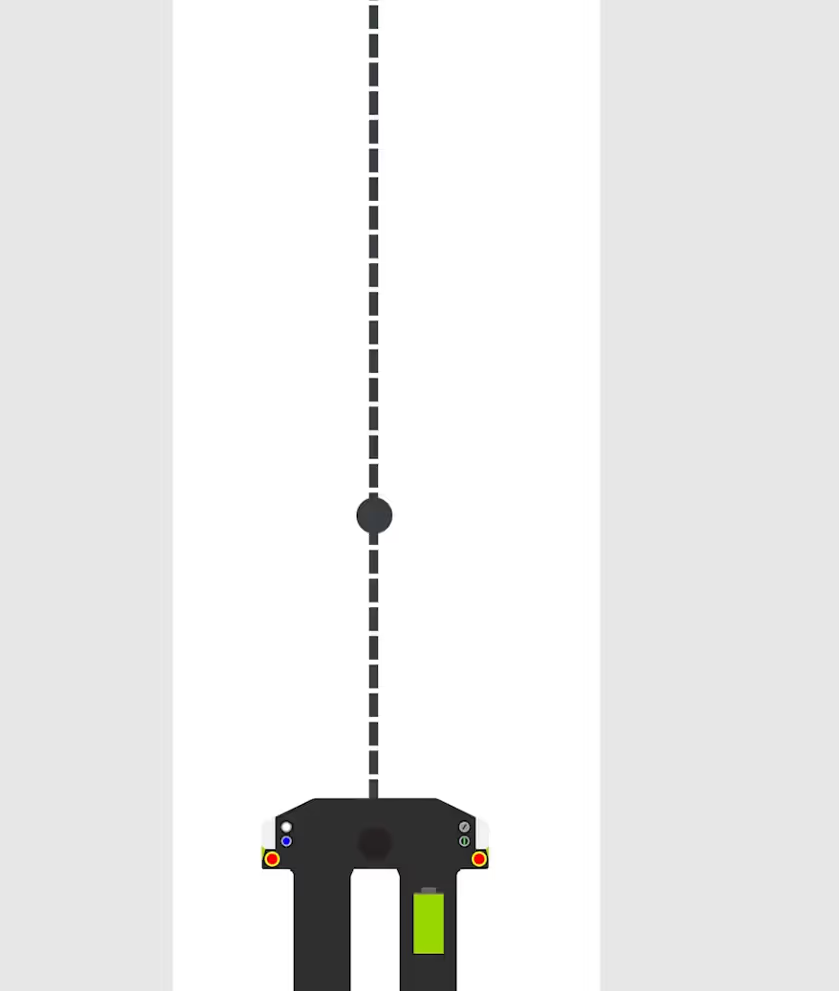
3. Seguimiento de trayectorias:
El algoritmo de control se encarga de conducir con precisión el AGV a lo largo de la trayectoria planificada (ya sea global o local).
Esta estrategia de planificación jerárquica equilibra la optimización global y el rendimiento local en tiempo real. Algoritmos como D Lite destacan en la gestión de cambios dinámicos locales gracias a su eficaz capacidad de replanificación incremental. La RRT y sus variantes, por su parte, son más ventajosas en el manejo de entornos complejos y restricciones de movimiento.
Retos y tendencias futuras
1. Desafíos
A pesar de los importantes avances en la tecnología de planificación dinámica de trayectorias, siguen existiendo retos en las aplicaciones industriales de los vehículos autoguiados:
- Requisitos de tiempo real: Los algoritmos deben realizar cálculos en milisegundos, sobre todo en situaciones de alta velocidad o tráfico denso.
- Incertidumbre ambiental: Ruido de los sensores, errores de posicionamiento y dificultades para predecir obstáculos dinámicos.
- Coordinación multi-AGV: Evita conflictos y bloqueos para lograr una colaboración eficiente.
- Restricciones cinemáticas complejas: Teniendo en cuenta el tamaño del AGV, el radio de giro y las prestaciones de aceleración/desaceleración.
2. Tendencias futuras
En el futuro, la planificación dinámica de rutas evolucionará hacia soluciones más inteligentes y eficientes:
- Integración del aprendizaje automático: Utilización del aprendizaje por refuerzo, el aprendizaje por imitación y otros métodos para que los vehículos autoguiados aprendan de forma autónoma estrategias de navegación óptimas.
- Planificación predictiva: Predecir las intenciones y trayectorias de otros obstáculos dinámicos (como peatones y vehículos) para planificar con antelación.
- Comprensión semántica: Permitir que los AGV comprendan la información semántica del entorno (como "acera" y "zona de carga") para tomar decisiones más adecuadas al escenario.
- Colaboración hombre-máquina: Logre una interacción y evasión más seguras y naturales en entornos de coexistencia hombre-máquina.
Conclusión
Dijkstra, A, RRT y sus variantes dinámicas son herramientas fundamentales de la biblioteca de algoritmos de planificación dinámica de trayectorias del AGV. Actúan como "ojos inteligentes" y "volante dinámico" del vehículo, permitiéndole moverse por entornos complejos con flexibilidad y eficacia. Comprender los principios y características de estos algoritmos es crucial para el avance de la tecnología AGV y el campo de la automatización en general. A medida que evolucionen los algoritmos y mejore la potencia de cálculo, los futuros vehículos autoguiados serán sin duda más inteligentes, fiables y eficientes.
AiTEN Robotics, con sede en Suzhou (China), es líder mundial en vehículos industriales autónomos (AMR/AGV) y soluciones de automatización logística. AiTEN Robotics ha desarrollado diez series de productos para satisfacer las necesidades de los escenarios de manipulación de materiales de pila completa. AiTEN Robotics ha desplegado más de 200 proyectos en más de 30 países y regiones, y cuenta con la confianza de numerosas empresas incluidas en la lista Fortune 500 de sectores como automoción, alimentación y bebidas, químico, farmacéutico, fabricación y logística de terceros, mejorando la seguridad operativa, la eficiencia y la preparación para el futuro.

