








Tecnología de posicionamiento de palés con robots de carretillas elevadoras: La clave para una manipulación precisa
_%E7%94%BB%E6%9D%BF%201.avif)
Con el desarrollo acelerado de la logística inteligente y la fabricación inteligente, la transformación inteligente se ha convertido en una vía clave para mejorar la eficiencia y reducir los costes. Los robots carretilla elevadora(AGV/AMR carretilla elevadora) son cada vez más ampliamente utilizados en el almacenamiento, fabricación, venta al por menor y otras industrias.
Entre ellas, la tecnología de posicionamiento de palés es uno de los eslabones centrales para lograr un funcionamiento eficiente y estable, y la precisión y fiabilidad de esta tecnología determinan directamente la eficiencia operativa global del sistema logístico automatizado. En este artículo, analizaremos el principio de la tecnología de posicionamiento de palés de robots de carretillas elevadoras, la trayectoria tecnológica clave y las ventajas y desafíos en las aplicaciones prácticas.
¿Qué es la tecnología de posicionamiento de palés con robots de carretillas elevadoras?
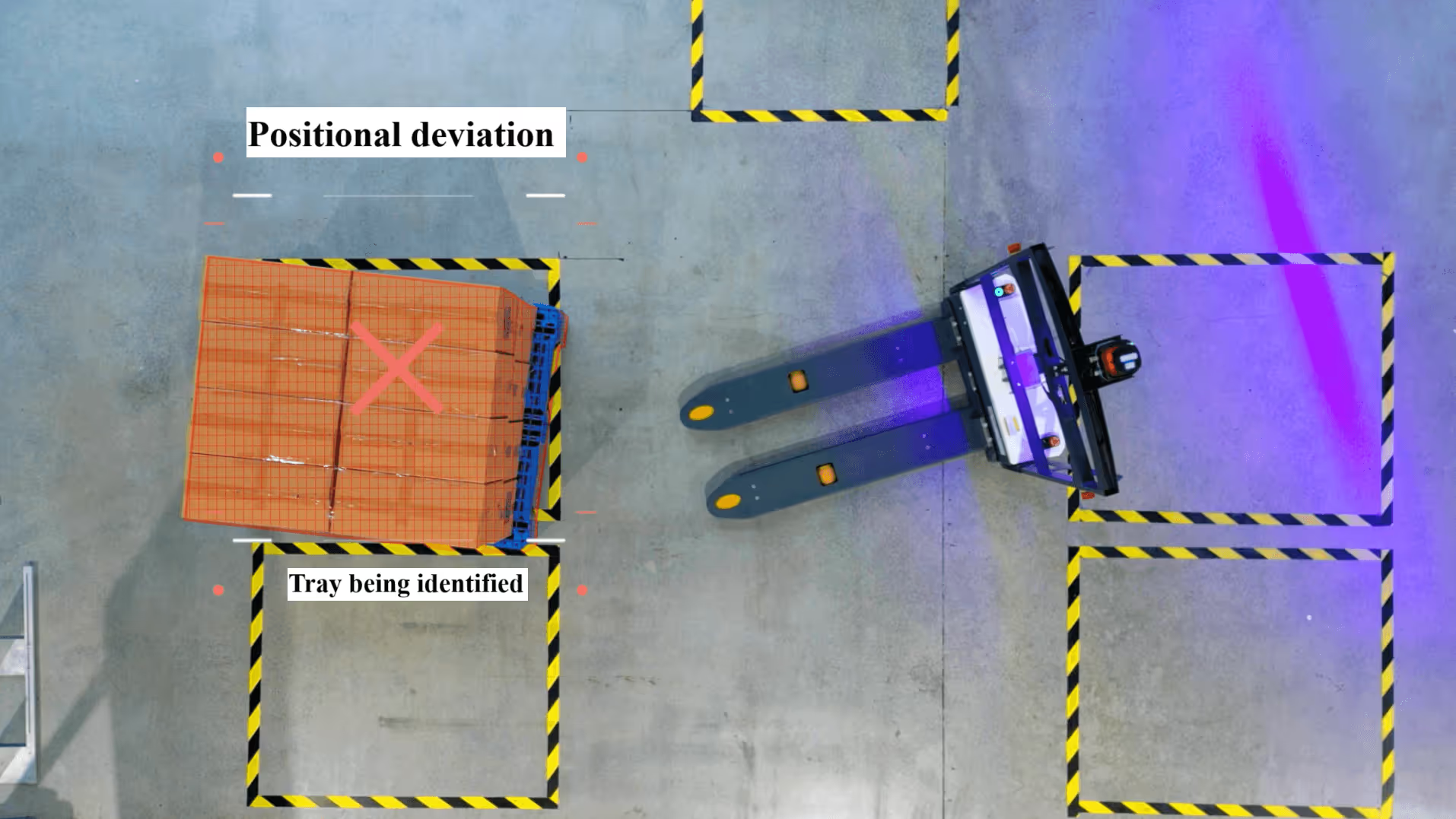
La tecnología de posicionamiento de palés de robots de carretillas elevadoras se refiere a la capacidad del robot para identificar, acoplar y bifurcar con precisión el palé en la operación de manipulación. Implica la identificación de la posición espacial del palé, la evaluación de la actitud, el ajuste dinámico y la optimización de la trayectoria, entre otros aspectos, que afectan directamente a la eficiencia de la manipulación y a la seguridad operativa.
En pocas palabras, es el proceso por el que los robots de carretillas elevadoras utilizan sensores avanzados y algoritmos inteligentes para identificar automáticamente la posición y la actitud (dirección y ángulo de inclinación) del palé y alinearlo con precisión en un entorno de almacén complejo y dinámico. El objetivo es garantizar que las púas de la horquilla puedan insertarse en la transpaleta de forma segura, estable y eficiente.
¿Por qué es importante el "posicionamiento de las paletas"?
Los entornos logísticos y de almacenamiento son cada vez más complejos, con una gran variedad de mercancías, diferentes especificaciones de palés y escenarios operativos que requieren una gran eficacia y precisión.
Un palé es la unidad de manipulación más pequeña en la logística de almacenaje. Si el robot de la carretilla elevadora (incluido el AGV/AMR) no puede encontrar con rapidez y precisión la posición del hueco del palé, se producirán problemas como la desviación de la horquilla, la caída y el ajuste secundario, que afectarán directamente a la rentabilidad de la inversión. Por lo tanto, la tecnología de posicionamiento de palés de alta precisión y bajo retardo se ha convertido en el cuello de botella clave para el aterrizaje a gran escala de carretillas elevadoras no tripuladas.
- La seguridad ante todo: La desviación de la posición puede hacer que los robots de carretillas elevadoras golpeen palés, estanterías u otros equipos e instalaciones, e incluso provocar el vuelco de la carga o riesgos de lesiones para el personal.
- Eficacia: Un posicionamiento preciso significa que los robots de carretillas elevadoras pueden completar con rapidez y precisión la recogida o colocación de la horquilla en un solo lugar, evitando ajustes repetidos y pérdidas de tiempo, lo que mejora significativamente la eficiencia de las operaciones logísticas.
- Estable y fiable: El sistema de automatización necesita garantizar la salida estable y fiable de cada operación, y el posicionamiento preciso es la base y el requisito previo para que las carretillas elevadoras no tripuladas sigan funcionando de manera eficiente.
- Reducir la intervención humana: La frecuente intervención humana en los almacenes automatizados hace que no se pueda liberar realmente el valor de la automatización, y el posicionamiento preciso es una condición necesaria para garantizar el funcionamiento continuo de la automatización total.
Al mismo tiempo, el posicionamiento preciso de los palés ayuda a optimizar el uso del espacio del almacén y a lograr un almacenamiento de alta densidad de mercancías mediante operaciones de apilamiento precisas.
El camino de la tecnología de posicionamiento de palés
Según los diferentes escenarios de aplicación y los requisitos de precisión, los robots de carretilla elevadora actuales utilizan principalmente los siguientes tipos de tecnología de localización de palés:
1. Localización de edificios por mapa LiDAR + SLAM
- Principio: Basado en LiDAR 2D o 3D para construir el mapa del entorno y el posicionamiento en tiempo real del propio robot carretilla elevadora, combinado con el reconocimiento del contorno de la paleta para un posicionamiento preciso.
- Ventajas: no depende de marcadores ambientales, gran adaptabilidad.
- Escenario de aplicación: Almacenes medianos y grandes, talleres industriales.

2. Reconocimiento visual (RGB/Cámara de profundidad)
- Principio: Adquirir información de imagen o profundidad a través de una cámara para reconocer gatos de palés, etiquetas o bordes de perfiles.
- Ventaja: Alta precisión, adecuada para la identificación de palés complejos, como palés estándar mixtos europeos/americanos.
- Desafíos: Sensible a la luz, requiere soporte de algoritmos de imagen de alto rendimiento.
3. Código QR/reflector + posicionamiento de la marca de navegación
Principio: Coloque códigos QR, marcadores reflectantes y otras señales auxiliares en el palé o en el espacio de carga para mejorar la estabilidad de posicionamiento.
- Ventajas: posicionamiento fiable, bajo coste de implantación.
- Escenarios aplicables: almacén de mercancías fijas, línea de producción, la línea de acoplamiento.
4. Localización por fusión multisensor
- Principio: Fusión de LIDAR, visión, IMU, ultrasonidos y otros sensores para lograr una localización altamente robusta.
- Ventaja: para hacer frente a los retos de la oclusión, los cambios de luz, las trayectorias complejas, etc.
- Tendencia: la dirección principal del desarrollo de robots de gama alta para carretillas elevadoras.
Diagrama esquemático del proceso de posicionamiento de palés
- Navegue hasta la ubicación objetivo - Utilice un mapa o un sistema de navegación de trayectoria fija para guiar la carretilla elevadora hasta las proximidades del palé.
- Posicionamiento de palés - Identifique el centro y la actitud del palé en tiempo real mediante sensores para determinar la posición del gato.
- Ajuste de actitud e inserción: el sistema controla los brazos de la carretilla elevadora para realizar ajustes finos con el fin de insertar y elevar la paleta con precisión.
- Manipulación y descarga - Combinado con la navegación por puntos de destino, el sistema completa la tarea de manipulación y descarga el palé de forma segura.
Retos comunes y vías de optimización
A pesar de los importantes avances en la tecnología de posicionamiento de palés para robots de carretillas elevadoras, todavía existen algunos retos en las aplicaciones prácticas.
En primer lugar, la diversidad de palés es un problema importante. Los palés utilizados por diferentes industrias y empresas difieren en tamaño, forma, material, etc., lo que plantea retos a la versatilidad de la tecnología de posicionamiento. Por ejemplo, algunas industrias especiales pueden utilizar palés personalizados, difíciles de adaptar mediante las técnicas de posicionamiento tradicionales.
En segundo lugar, el complejo entorno operativo también pone a prueba la tecnología de posicionamiento. Puede haber poca luz, más polvo y bloqueo de mercancías en el almacén, lo que afecta a la precisión y estabilidad del posicionamiento.
Para hacer frente a estos retos, por un lado, el personal de I+D de AiTEN optimiza continuamente el algoritmo de posicionamiento y mejora su capacidad de adaptación para que pueda manejar distintos tipos de palés. Por ejemplo, se utiliza un enfoque de fusión de datos multimodal para fusionar y analizar datos de múltiples sensores, como visión y LiDAR, para identificar y localizar palés con mayor precisión.
Por otro lado, se potencia la mejora de los equipos de hardware para mejorar la capacidad antiinterferente de los equipos. Por ejemplo, desarrollar cámaras con mayor resolución y resistencia al ruido, y LiDAR que puedan funcionar de forma estable en entornos difíciles. Mientras tanto, al establecer una base de datos de palés para almacenar y gestionar las características de los distintos tipos de palés, el sistema puede emparejar e identificar rápidamente nuevos palés cuando se los encuentra, lo que mejora la precisión y la eficacia del posicionamiento.
Tendencias futuras en tecnología de posicionamiento de palés
En el futuro, la tecnología de posicionamiento de palés de robots de carretillas elevadoras se desarrollará en la dirección de ser más inteligente, precisa y eficiente. Con el progreso continuo de la tecnología de inteligencia artificial, el modelo de aprendizaje profundo será más inteligente, capaz de aprender y adaptarse automáticamente a una variedad de palés complejos y condiciones ambientales, mejorando aún más la precisión y la velocidad de posicionamiento. Al mismo tiempo, la tecnología de fusión multisensor se utilizará más ampliamente para realizar el posicionamiento integral y de alta precisión del palé a través de la fusión profunda de datos de una variedad de sensores, como visión, LiDAR, ultrasonidos, etc.
- Potenciación profunda de la IA: El aprendizaje profundo desempeñará un papel más importante en la detección de objetivos, la estimación de la actitud y el procesamiento de anomalías, y mejorará el nivel de inteligencia.
- Profundización de la fusión multimodal: Los algoritmos de fusión de láser, visión, radar, IMU y otros sensores serán más inteligentes.
- Normalización y modularidad: Las interfaces y soluciones tecnológicas de posicionamiento tenderán a estandarizarse y modularizarse para facilitar su integración y despliegue.
- Aumento del rendimiento antiatasco: Mejorar la estabilidad del posicionamiento en situaciones de iluminación compleja, polvo, deformación de palés, oclusión parcial y otros escenarios industriales es la clave para mejorar el valor del sistema sobre el terreno.
La tecnología de posicionamiento se integrará más profundamente con otras funciones de los robots de carretillas elevadoras, como la planificación de trayectorias, la evitación de obstáculos, etc., para realizar todo el proceso de funcionamiento inteligente de los robots de carretillas elevadoras, y proporcionar un soporte técnico más sólido para el desarrollo inteligente de la industria de la logística y el almacenamiento.
Conclusión
La tecnología de posicionamiento de palés determina directamente la capacidad de ejecución, la seguridad operativa y el nivel de eficiencia operativa del robot en entornos industriales complejos. Con el desarrollo de la IA, la percepción y la tecnología de control, la capacidad de posicionamiento de palés de los robots de carretillas elevadoras seguirá mejorando, ayudando a las empresas a dar un paso más firme en el camino hacia la reducción de costes y la eficiencia.
Acerca de AiTEN Robotics
Como empresa especializada en soluciones logísticas inteligentes, AiTEN Robotics se ha centrado sistemáticamente en el escenario de la "fábrica inteligente", integrando profundamente la innovación tecnológica con las necesidades de la industria. Ha prestado servicios integrales a más de 200 clientes fabricantes de todo el mundo: Aprovechando una gama completa de carteras de productos de robots de manipulación de materiales para cubrir diversos escenarios de manipulación de materiales, hemos desarrollado un sistema de programación inteligente de nivel industrial para permitir una colaboración eficiente entre múltiples dispositivos. A través de un sistema integral de servicios de ciclo de vida que abarca desde la planificación preventa, la implantación y la implementación hasta la optimización de las operaciones, capacitamos a las empresas para lograr la transformación inteligente de la logística, impulsando continuamente la actualización digital y el desarrollo de alta calidad de la industria manufacturera.
Póngase en contacto con nosotros para estudiar soluciones de automatización para su fábrica.

