








Análisis de la tecnología de planificación de rutas de recogida y colocación de AGV para la manipulación de palés
_%E7%94%BB%E6%9D%BF%201.avif)
.avif)
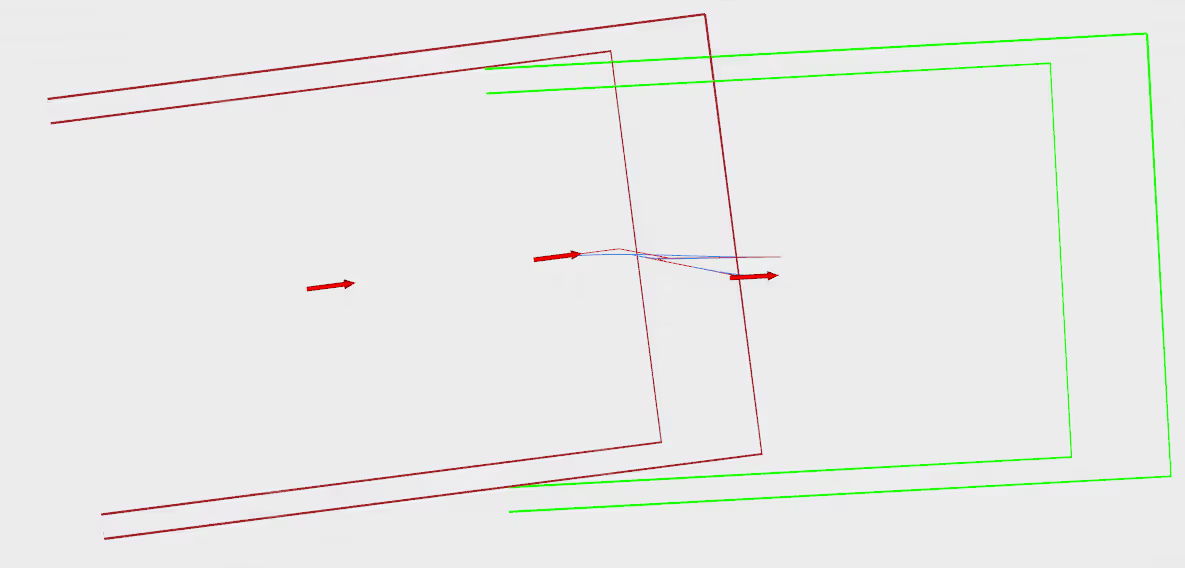
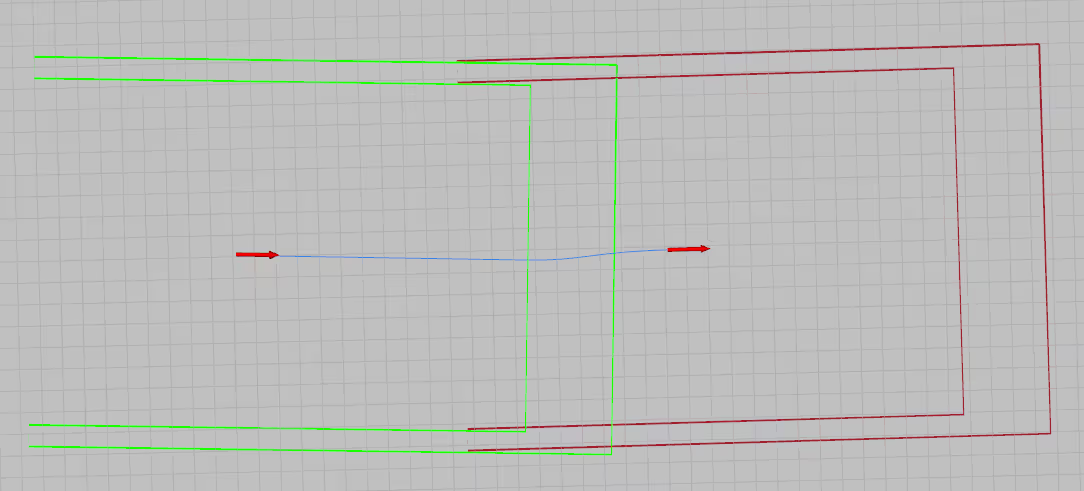
La precisión en la recogida y colocación de palés por parte de los AGV depende de una avanzada tecnología de planificación de trayectorias. La tarea no sólo requiere trayectorias sin colisiones, sino también una postura de alta precisión y trayectorias suaves al acercarse a los palés. Este artículo analiza las tecnologías básicas para lograr este objetivo, como la aplicación coordinada de curvas híbridas A y Bézier.
¿Por qué la manipulación de palés requiere una planificación especial del recorrido?
Retos:
- Alta precisión al final: Las horquillas deben alinearse con los orificios de las horquillas de los palés con precisión centimétrica/milimétrica y cumplir estrictos requisitos de orientación de aparcamiento.
- Fuertes restricciones de movimiento: Es necesario respetar estrictamente las dimensiones del AGV, el radio mínimo de giro y las restricciones no completas (sin movimiento lateral), especialmente en espacios estrechos.
- Suavidad de trayectoria: Evite las aceleraciones, desaceleraciones o giros bruscos para garantizar la estabilidad de la carga y la seguridad operativa.
- Precisión en la aproximación para evitar obstáculos: La detección de alta precisión es necesaria al acercarse a los palés para hacer frente a obstáculos desconocidos o errores de posicionamiento.
Análisis técnico
1. Planificación global de trayectorias
Tecnología: Dijkstra, estándar A*
Función: Generar rápidamente una ruta general (conectada, de bajo coste) desde el punto de partida hasta la zona de bandejas en el mapa de cuadrícula global.
Características: Velocidad rápida, ignora los detalles cinemáticos.
2. Planificación precisa de la ruta final
Tecnología principal: Híbrido A**
Ventajas: Busca en un espacio de estados continuo (x, y, θ) e incrusta directamente modelos cinemáticos de vehículos (como modelos de bicicletas).
Efectos: Genera trayectorias factibles que alcanzan la postura objetivo exacta (x, y, θ) y cumplen restricciones como el radio de giro, resolviendo problemas complejos de giro en el "último metro".
3. Suavizado y optimización de trayectorias
Tecnología de base: Curvas de Bézier
Ventajas: Genera curvas suaves y continuas a través de puntos de control, asegurando que las posiciones de inicio/fin y las direcciones (tangentes) son controlables.
Aplicaciones: Suaviza las trayectorias generadas por la búsqueda (a menudo contienen ángulos), garantizando una curvatura continua; conecta segmentos de trayectorias; genera trayectorias de velocidad continua.
Tecnologías alternativas: B-splines, NURBS.
4. Evitación de obstáculos en tiempo real y ajuste de la trayectoria
Tecnología: Algoritmo de Ventana Dinámica (DWA), Banda Elástica de Tiempo (TEB), Replanificación Rápida.
Función: Basándose en los datos de los sensores, ajusta localmente la trayectoria/velocidad para evitar obstáculos dinámicos manteniéndose lo más cerca posible de la trayectoria optimizada original.
Convergencia tecnológica
El proceso de planificación de la trayectoria de recogida y colocación de palés del AGV puede ser el siguiente.
1. Planificación global (A*): Planifique una ruta aproximada desde el punto de partida hasta las proximidades de la zona de palés en el mapa de cuadrículas.
2. Interruptor de planificación de terminales: Activa la planificación detallada cuando el AGV se aproxima a la zona de palés.
3. Acoplamiento preciso (Híbrido A*): Planifica una trayectoria que cumpla con la cinemática hasta la pose objetivo (x, y, θ).
4. Suavizado de trayectoria (Bezier/Spline): Suaviza la trayectoria cosida para generar una trayectoria final geométricamente continua.
5. Generación de trayectoria: Generar una trayectoria con restricciones de velocidad/aceleración basada en la trayectoria suavizada para que el controlador la ejecute.
6. Evitación de obstáculos en tiempo real: Supervisa todo el proceso y ajusta dinámicamente la trayectoria/velocidad para evitar obstáculos.
Desafíos
Aunque las tecnologías existentes ya pueden resolver en cierta medida los problemas de picking y colocación de palés de los AGV, todavía existen retos y oportunidades de desarrollo:
- Equilibrio entre eficacia y precisión: Una planificación más detallada suele implicar mayores costes informáticos. Cómo mejorar la velocidad de planificación garantizando al mismo tiempo la precisión es un área de optimización continua.
- Adaptabilidad a entornos dinámicos: Cómo manejar con mayor solidez los obstáculos en movimiento, los cambios de posición de los palés o las posturas.
- Fusión de sensores y precisión de posicionamiento: la ejecución de trayectorias de alta precisión depende del posicionamiento en tiempo real y de la percepción del entorno.
- Operaciones colaborativas con varios AGV: En zonas de picking y colocación densamente pobladas, cómo coordinar de forma eficiente y segura varios AGV para las operaciones.
- Métodos basados en el aprendizaje: Exploración del uso del aprendizaje por refuerzo y otros métodos para permitir que los AGV aprendan de forma autónoma estrategias y rutas óptimas de recogida y colocación.
Conclusión
La preparación y colocación precisas de palés mediante vehículos autoguiados es una tarea compleja y exacta en el campo de la automatización. No depende de una única tecnología, sino de la combinación y coordinación inteligente de múltiples tecnologías de planificación y optimización de rutas.
Desde el guiado global de rutas hasta la planificación cinemática de puntos finales basada en la percepción que permite Hybrid A*, pasando por trayectorias suaves logradas mediante técnicas como las curvas de Bézier, estas tecnologías trazan colectivamente un "camino inteligente" para que los AGV funcionen de forma segura, precisa y eficiente, inyectando un poderoso impulso a la logística y la producción automatizadas modernas. A medida que la tecnología siga avanzando, tenemos motivos para creer que los AGV del futuro demostrarán una inteligencia y una flexibilidad aún mayores en las operaciones de manipulación de palés.
AiTEN Robotics, con sede en Suzhou (China), es líder mundial en vehículos industriales autónomos (AMR/AGV) y soluciones de automatización logística. AiTEN Robotics ha desarrollado diez series de productos para satisfacer las necesidades de los escenarios de manipulación de materiales de pila completa. AiTEN Robotics ha desplegado más de 200 proyectos en más de 30 países y regiones, y cuenta con la confianza de numerosas empresas incluidas en la lista Fortune 500 de sectores como automoción, alimentación y bebidas, químico, farmacéutico, fabricación y logística de terceros, mejorando la seguridad operativa, la eficiencia y la preparación para el futuro.

