








Los robots de manipulación AGV utilizan comúnmente principios de sensores y sus ventajas y desventajas, introducción a la aplicación
_%E7%94%BB%E6%9D%BF%201.avif)

Ⅰ. LiDAR
(1) ¡Descubra cómo el LiDAR se fija en objetivos de alta velocidad en tiempo real!
El LiDAR es un sistema de sensores que detecta la información del objetivo mediante la emisión de un rayo láser. Su principio fundamental es: emitir un láser al objetivo y recibir la señal reflejada, determinar la distancia al objetivo calculando el tiempo de ida y vuelta del láser; simultáneamente, el dispositivo gira a alta velocidad para realizar un escaneo de 360 grados, recopila datos densos de nubes de puntos (un conjunto de coordenadas en la superficie del objeto) y construye un modelo digital 2D/3D del entorno en tiempo real. El sistema puede medir con precisión la posición, la velocidad, la forma y muchos otros parámetros del objetivo, y se utiliza ampliamente en los campos de la conducción autónoma, la cartografía, etc.
Los datos de nube de puntos son una colección de todos los puntos de la superficie del objeto detectados por el LiDAR dentro del rango de escaneo. Cada punto contiene dos tipos de información clave:
① Características de reflectividad
Rango de valores: 0-255
Objetos que reflejan de forma difusa: 0-150 (correspondiente a una reflectividad del 0% al 100%)
Objetos reflectantes: 151-255 (por ejemplo, metal, vidrio)
Note: When the object is <2m away from the Mid-360 radar, the reflectivity error is large, and only the total reflection/diffuse reflection type can be judged.
② Coordenadas espaciales
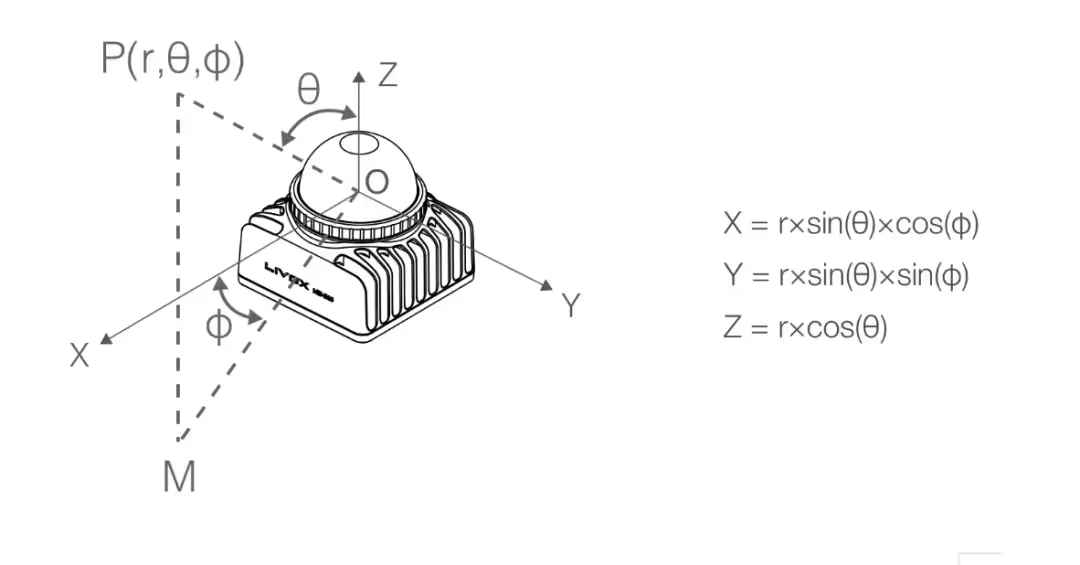
Tipo de sistema de coordenadas: coordenadas cartesianas (x,y,z) o coordenadas esféricas (r,θ,φ).
Cuando la detección es efectiva: emite el valor de la coordenada verdadera.
Cuando la detección no es válida (sin objeto/fuera de rango > 100 m):
Coordenadas cartesianas: (0,0,0)
Coordenadas esféricas: (0,θ,φ) (conserva la información del ángulo de escaneo actual)
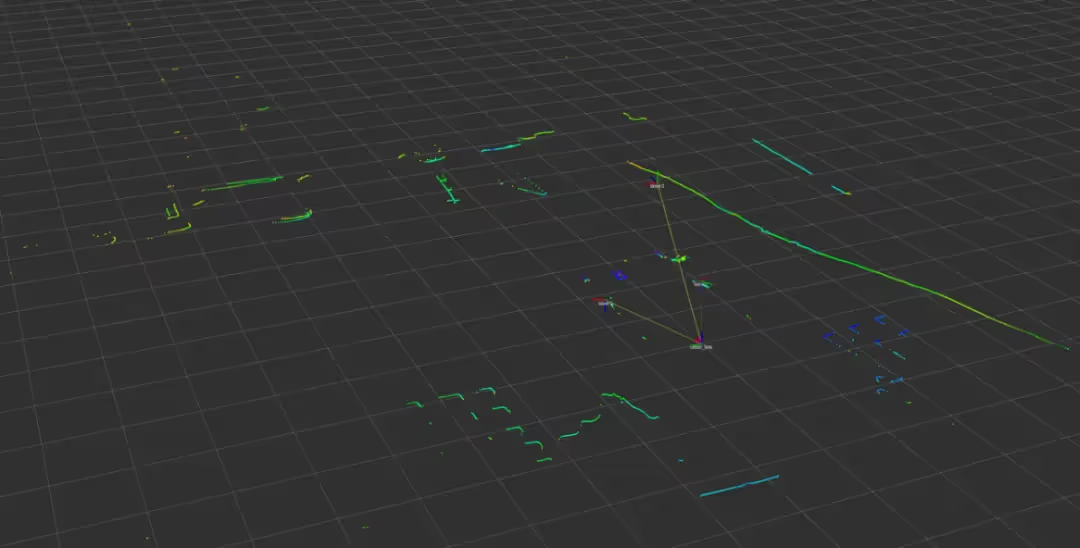
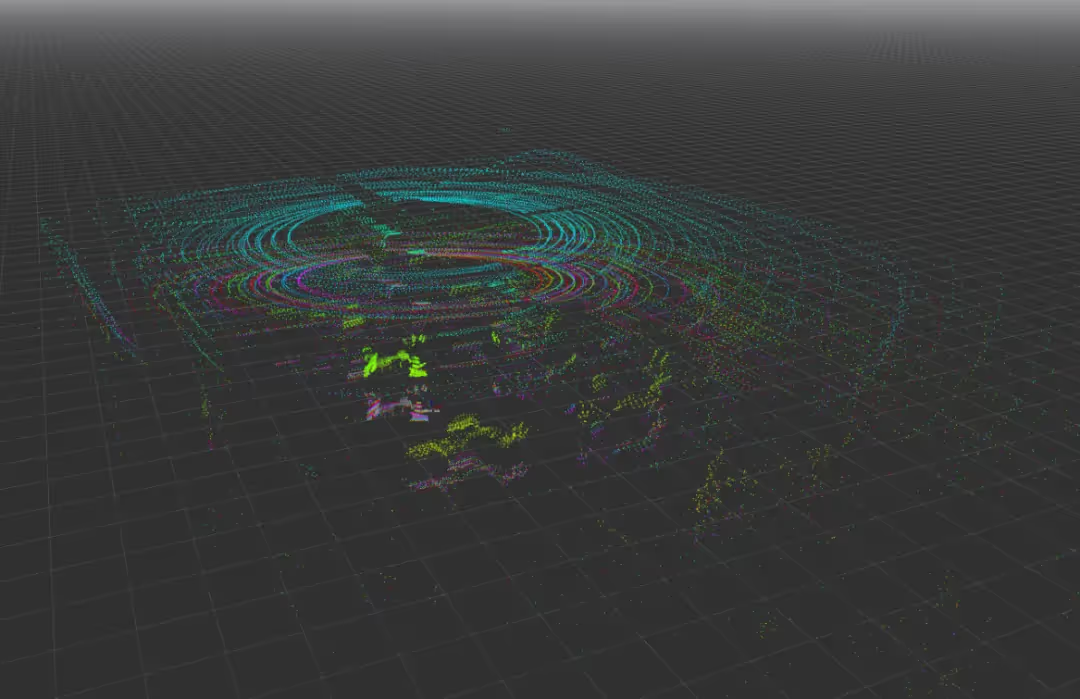
2. El LiDAR se puede dividir en LiDAR de una sola línea y LiDAR multilínea según la clasificación del número de líneas. El LiDAR de una sola línea se refiere a la fuente láser emitida por el haz de un radar de una sola línea, lo que permite acceder al mapa de escaneo planar 2D. El LiDAR multilínea se refiere a la emisión y recepción simultánea de múltiples haces de un radar láser rotatorio de medición de distancias. Actualmente, se comercializan versiones de 4, 8, 16, 32, 64 y 128 líneas de puntos. El LiDAR multilínea puede reconocer la información de altura de un objeto y obtener un escaneo 3D del entorno circundante. La figura muestra una visualización de la nube de puntos 2D y 3D.
(2) ¿Por qué la navegación siempre adivina hacia dónde quieres ir?
La navegación láser es un método de navegación común en los sistemas AGV. Gracias a su principio de navegación, los AGV pueden desplazarse libremente por el área de navegación y localizarse con precisión. Dentro del rango de navegación, la trayectoria del vehículo puede modificarse en cualquier momento según las necesidades reales, lo que optimiza la flexibilidad de los AGV y mejora la eficiencia de producción. Muchos sistemas deben implementarse en las condiciones existentes del sitio, lo que resulta especialmente adecuado para los sistemas AGV con navegación láser.
1. Los principios básicos de la navegación láser se pueden resumir en dos principios principales:
① Construcción de mapas (aprender el entorno por primera vez)
Cuando el AGV se pone en marcha por primera vez, escanea su entorno desde todos los lados con LiDAR, como si "escaneara una habitación con un puntero láser".
Utilizando la tecnología SLAM (Localización Autónoma + Mapeo), registra la posición de objetos fijos como paredes y equipos para crear un mapa digital del entorno.
②Posicionamiento en tiempo real (detección de posición durante la navegación)
Mientras el AGV está en movimiento, el LiDAR escanea continuamente y adquiere una nube de puntos "instantánea" del entorno circundante en tiempo real.
Los datos en tiempo real se comparan con el mapa almacenado (similar al "Juego de encontrar las diferencias") y el algoritmo calcula la posición y orientación precisas actuales del AGV.

2. Funciones de navegación láser:
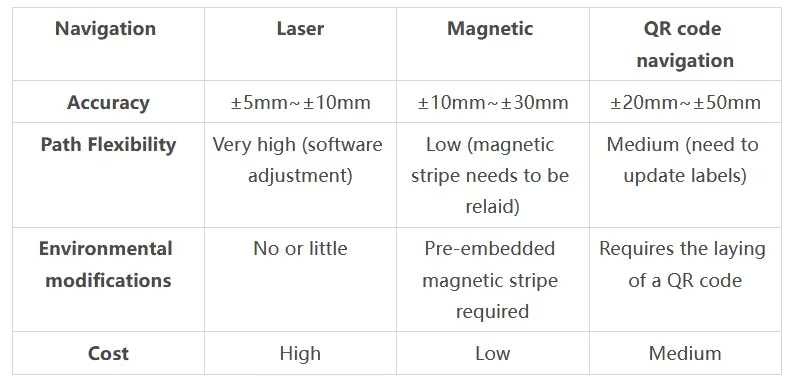
Posicionamiento y navegación de alta precisión, adecuados para escenas con estrictos requisitos de precisión, como apilar y colocar mercancías; fuerte adaptabilidad ambiental, las escenas complejas tienen cierta compatibilidad, pueden hacer frente a cambios en la iluminación, ligeras irregularidades del terreno y otras interferencias, pero deben evitar la luz fuerte directamente en el LiDAR, lo que puede afectar la precisión de alcance; sin limitaciones de ruta fija, a diferencia de la guía magnética o la navegación de código bidimensional, la navegación láser no necesita tiras magnéticas preintegradas o etiquetas de colocación, a través del software se puede modificar libremente la ruta; alta inteligencia y escalabilidad, cooperación de múltiples vehículos, a través del sistema de programación central para compartir el mapa y la información de posición en tiempo real, para lograr operaciones cooperativas de múltiples AGV, como evitación de rutas cruzadas, asignación de tareas.
Compárese con otros métodos de navegación como se muestra en la tabla:
(3) ¿Cómo se genera el reflejo condicionado de la IA de evitar obstáculos en segundos?
1. Principio de evitación de obstáculos por láser
A través del escaneo en tiempo real del radar láser para generar datos de nubes de puntos ambientales, los primeros algoritmos inteligentes agregarán nubes de puntos adyacentes en grupos de obstáculos, distinguiendo entre objetos estáticos (posición sin cambios) y objetos dinámicos (cambio de posición, trayectoria predecible); al mismo tiempo, combinado con el escaneo simultáneo de múltiples datos de radar, el análisis unificado centrado en el cuerpo del entorno circundante, el cuerpo de toda la nube de puntos fuera del automóvil se marca como un obstáculo, la planificación en tiempo real de caminos seguros para evitar el peligro.
2. Tipo de evitación de obstáculos
LiDAR de una sola línea (por ejemplo, serie SICK TIM): bajo coste, utilizado para evitar obstáculos en planos 2D.
LiDAR multilínea (por ejemplo, Livox Mid360, Velodyne VLP-16): evitación de obstáculos en 3D, detecta información de altura espacial para evitar objetos bajos o colgantes.
3. Ubicación de la instalación del radar de evitación de obstáculos
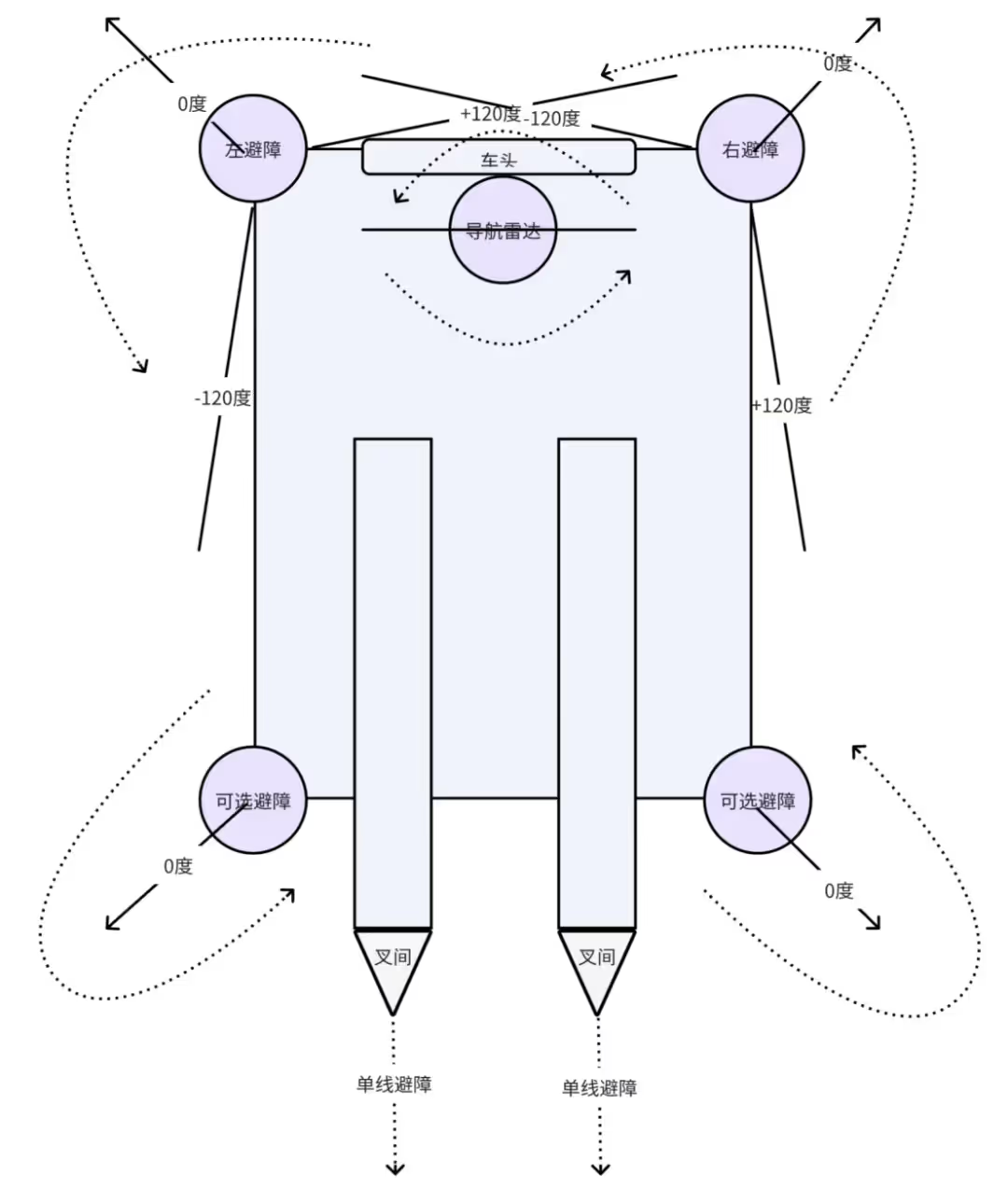
Se utiliza principalmente para la evasión de obstáculos principal delantera/trasera, la protección lateral a ambos lados de la carrocería y la monitorización global superior, como se muestra en la figura. La parte delantera y trasera del vehículo se instalan generalmente en las cuatro esquinas de la carrocería, y el radar se inclina hacia afuera frente a él. La protección lateral a ambos lados de la carrocería generalmente está cubierta por el alcance de escaneo del radar en las cuatro esquinas. Los sistemas de monitorización global superior suelen utilizar simultáneamente un radar de navegación para la evasión de obstáculos.
Con el radar directamente al frente a 0 grados, el alcance para cubrir el borde del cuerpo es de aproximadamente 135 grados. Sin embargo, debido a la interferencia del cuerpo, es necesario filtrar la parte cercana, por lo que el campo de visión (FOV) generalmente se establece en aproximadamente 120 grados. Entre las horquillas, generalmente solo se detecta una línea sin evasión de obstáculos angulares.
4. Evitación de obstáculos con entorno espacial de 360 grados
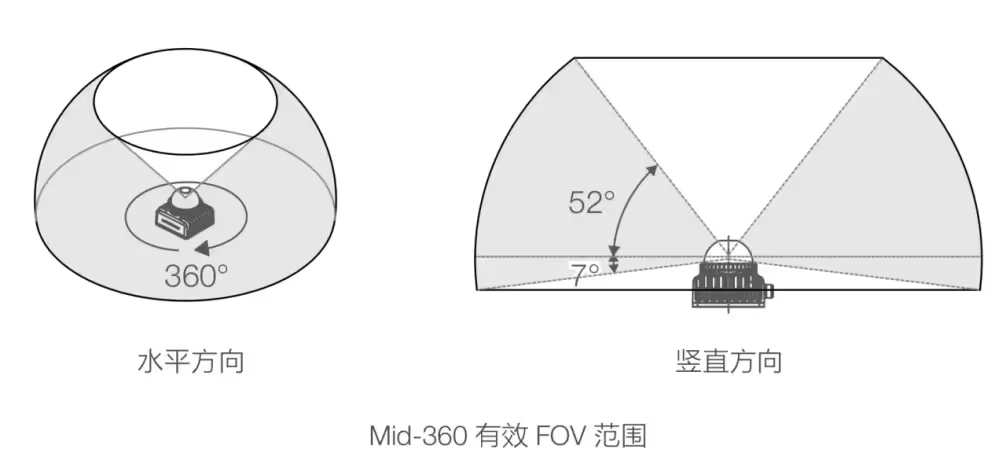
Es necesario ubicar la instalación del radar 2D y 3D para garantizar que el rango de escaneo cubra toda la carrocería alrededor de un círculo.
El radar 3D hasta mid360, por ejemplo, necesita conocer la definición de sus coordenadas y la cobertura máxima del rango de escaneo, como se muestra en la figura.
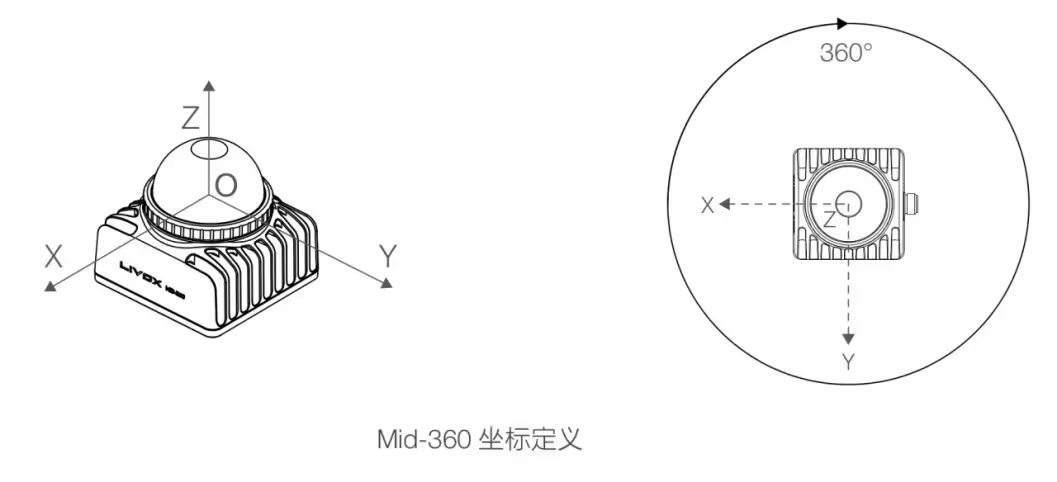
El esquema predeterminado es: un radar 3D se instala verticalmente o inclinado hacia arriba debajo del radar de navegación frontal, un radar 3D se instala verticalmente o inclinado hacia arriba en ambos lados del cuerpo, un radar 3D se instala verticalmente o inclinado hacia arriba debajo de las horquillas en el lado trasero del cuerpo y el IO optoelectrónico se utiliza para evitar obstáculos entre las horquillas.
5. Ventajas y limitaciones técnicas
Ventajas: Alta precisión: precisión milimétrica en la medición, mucho mayor que la de los sensores ultrasónicos o infrarrojos. Antiinterferencias: no se ve afectado por la luz ambiental, el polvo ni los campos electromagnéticos (en comparación con los sensores de visión). Respuesta rápida: frecuencia de escaneo generalmente de 10 Hz a 50 Hz, ideal para vehículos guiados autoguiados (AGV) de alta velocidad (≥1,5 m/s).
(4) Navegación láser en el manejo de robots
1. Descripción general del principio de percepción láser:
Tras obtener los datos de la nube de puntos mediante un radar 3D, primero filtra la información de interferencias, como el polvo y el reflejo del vidrio, y luego extrae las características estructurales clave, como los bordes de los estantes, las esquinas de las paredes y los orificios de las horquillas de los palés, mediante algoritmos inteligentes. Finalmente, mapea con precisión los objetos objetivo en el sistema de coordenadas, genera la información posicional y gestual, y construye el mapa del entorno local mediante semántica, para lograr la percepción inteligente de "ver los objetos y comprender la escena".
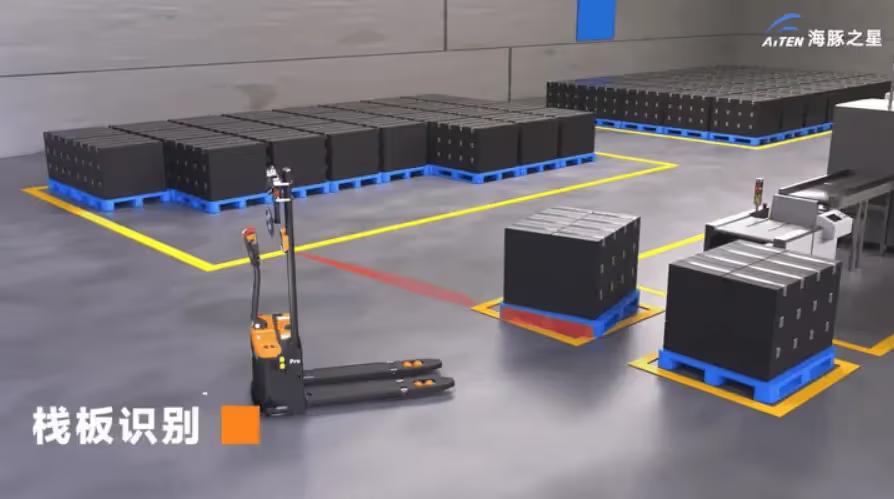
2. Identificación y posicionamiento de palets
3. Alineación de la horquilla

4. Apilamiento automático

5. Ventajas y limitaciones técnicas
Ventaja: Alta precisión: La precisión del láser puede alcanzar ±1 mm, lo que satisface las necesidades de la operación de palés de nivel industrial. Resistente a la interferencia de la luz ambiental: En comparación con las soluciones de visión, el láser no se ve afectado por los cambios de luz. Potente tiempo real: Frecuencia de escaneo de 10 Hz a 50 Hz, ideal para entornos logísticos de alta velocidad.
Limitaciones: Alto costo: El precio del LiDAR es significativamente mayor que el del ultrasónico, especialmente el radar multilínea. Impacto de materiales especiales: Los objetos que absorben luz negra o los objetos reflectantes especulares pueden reducir la fiabilidad de la detección. Complejidad computacional: El procesamiento de nubes de puntos en tiempo real requiere una alta potencia de procesamiento (requiere una GPU integrada o un procesador dedicado).
II. Cámara
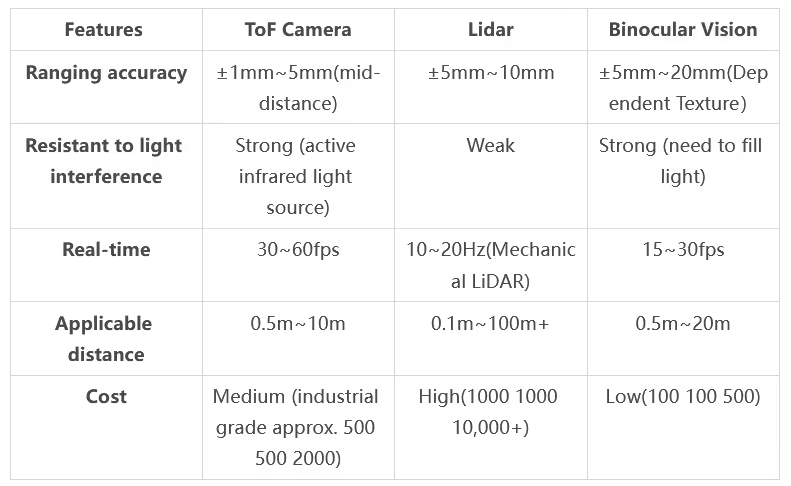
(1) Cómo ToF utiliza ondas de luz para lograr una «medición espacial» a escala milimétrica
El tiempo de vuelo (ToF) es una de las tres tecnologías principales de imagen 3D (las otras dos son la luz estructurada y la visión estéreo binocular). Su principio consiste en obtener directamente la información de distancia (profundidad) de un objeto mediante la emisión de luz infrarroja cercana y el cálculo del tiempo de ida y vuelta de la luz. En comparación con otras tecnologías, el ToF ofrece las ventajas de un cálculo sencillo, una alta resistencia a las interferencias y la medición de larga distancia, por lo que se utiliza ampliamente en cámaras traseras de teléfonos móviles (p. ej., Huawei/OPPO/Apple), automatización industrial, navegación AGV y agarre de robots.
1. dtof
dToF (Direct Time-of-Flight Ranging) consta de tres componentes principales:
① VCSEL: emite pulsos láser de nanosegundos;
② SPAD (diodo de avalancha de fotón único): detecta señales de luz reflejadas a nivel de un solo fotón;
③ TDC (Convertidor de tiempo a digital): registra con precisión el tiempo de ida y vuelta del pulso óptico.
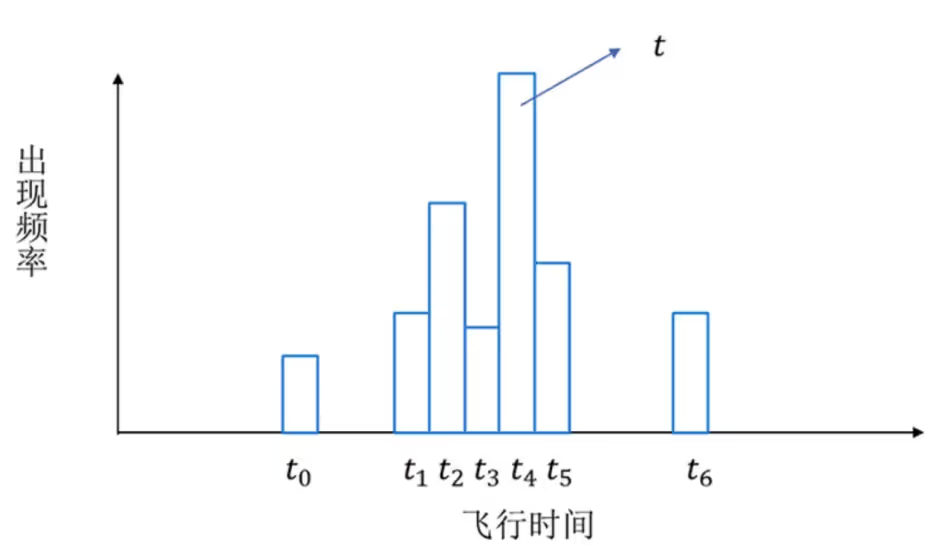
El principio de funcionamiento es el siguiente: se transmiten y reciben N pulsos en una sola trama, se registra el tiempo de vuelo en cada paso por el TDC y se genera un histograma. Posteriormente, se toma el tiempo de frecuencia más alto t para calcular la profundidad (d = ct/2). Esta técnica mejora significativamente la capacidad antiinterferente mediante la optimización estadística y logra una medición de profundidad de alta precisión.
Aunque el principio del dToF parece muy simple, es difícil lograr un alto grado de precisión. Además de los altos requisitos de precisión para la sincronización del reloj, también existen altos requisitos para la precisión de la señal de pulso. Los fotodiodos comunes difícilmente pueden satisfacer estas exigencias. El componente principal del dToF, el SPAD, no es producido por muchos fabricantes debido a la complejidad del proceso de producción y su difícil integración. Por lo tanto, actualmente no muchos fabricantes investigan el dToF, mientras que cada vez más investigan y promueven el iToF.
2. de
El concepto de iToF corresponde a dToF, y su nombre completo es Tiempo de Vuelo Indirecto, que se traduce directamente como Tiempo de Vuelo Indirecto de la Luz. Esto significa que iToF mide el Tiempo de Vuelo de la Luz indirectamente, midiendo el desplazamiento de fase, en lugar de medirlo directamente. iToF transmite señales de luz infrarroja modulada a la escena, y el sensor recibe las señales de luz reflejadas por los objetos a medir en la escena. Calcula la diferencia de fase entre la señal transmitida y la señal recibida, basándose en la carga acumulada durante el tiempo de exposición (integración), para obtener la profundidad del objeto objetivo. Como se muestra en la figura.
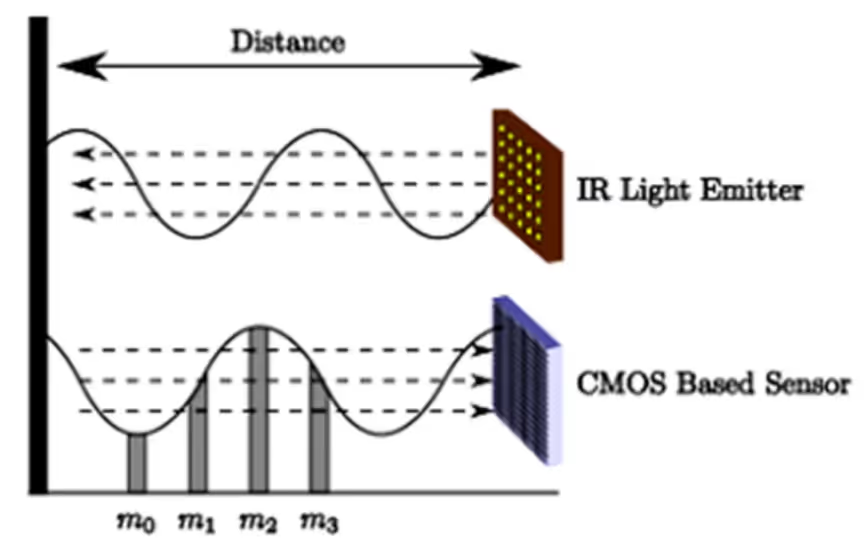
Los componentes principales del módulo iToF consisten en un sensor de imagen (VCSEL) y un sensor de imagen. El VCSEL emite luz infrarroja modulada a una frecuencia específica. El sensor de imagen recibe la luz reflejada y realiza la conversión fotoeléctrica durante el tiempo de exposición (integración). Al final de la exposición (integración), los datos se leen y se transfieren a través de un convertidor analógico-digital a una unidad de cálculo, que calcula el desfase de cada píxel. iToF calcula la profundidad mediante un algoritmo de 4 muestras, que utiliza 4 muestras con retardos de fase de 0°, 90°, 180° y 270°. Como se muestra en la Fig.

3. Generación de mapas de profundidad
La visión estéreo binocular utiliza las cámaras izquierda y derecha para fotografiar objetos sincrónicamente y utiliza el paralaje (la diferencia en la posición de los objetos en la imagen) para calcular la profundidad, similar a la percepción de la distancia del ojo humano; mientras que la cámara ToF registra directamente el valor de la distancia de tiempo de vuelo de cada píxel, generando un mapa de profundidad de alta resolución (por ejemplo, 640 × 480) y combinándolo con la cámara RGB para construir una nube de puntos 3D colorida, ambas son las tecnologías centrales para el modelado del entorno 3D.
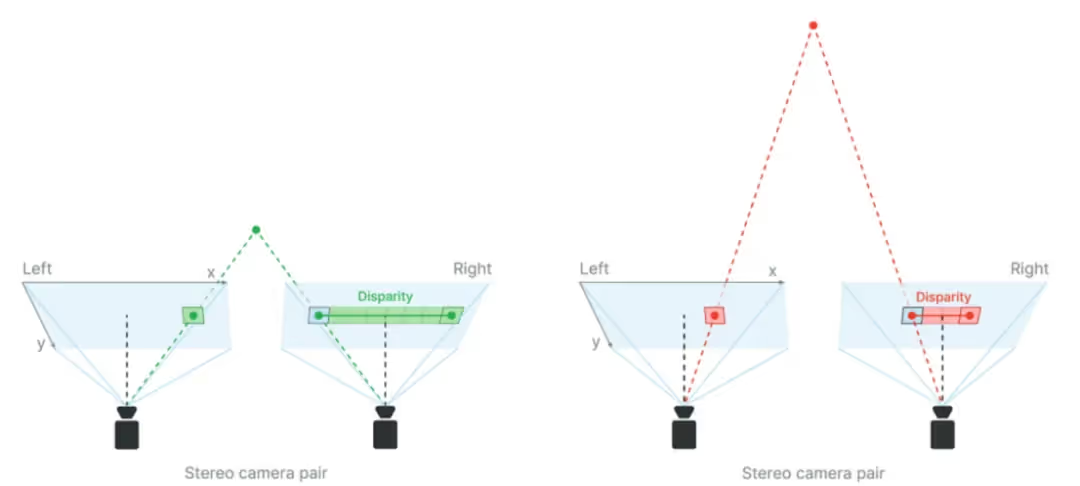
Fórmula de cálculo del mapa de profundidad esquemático del principio de paralaje:

Una distancia de referencia mayor o una distancia focal mayor producirán mayores profundidades con el mismo paralaje, lo que se traduce en una mayor precisión de profundidad. La distancia focal es la distancia entre el objetivo de la cámara y el sensor de imagen. Cuanto mayor sea la distancia focal, más estrecho será el campo de visión (FOV). Por lo tanto, para obtener una percepción de profundidad a larga distancia, se puede aumentar la distancia de referencia o reducir el FOV.
(2) Aplicación de la cámara ToF en el campo AGV
1. Prevención de obstáculos y protección de la seguridad
Evitación dinámica de obstáculos: detección en tiempo real de obstáculos a menos de 5 m (p. ej., personas, montacargas, estanterías), lo que activa la desaceleración o la parada de emergencia. Zona de seguridad multinivel (p. ej., advertencia a más de 1 m, parada de emergencia a menos de 0,3 m). Detección de obstáculos bajos: detección de palés, cajas de carga, etc., en el suelo para evitar colisiones o aplastamientos del AGV.
2. Identificación de palets y recogida con horquillas
Posicionamiento de palets: Identifique la posición del orificio de la horquilla mediante un mapa de profundidad, con una precisión de ±3 mm, adaptándose a diferentes tipos de palets (madera, plástico, metal). Recogida automática de horquillas: Combinado con el control de movimiento del AGV, la posición del brazo de la horquilla se ajusta para garantizar una inserción precisa.
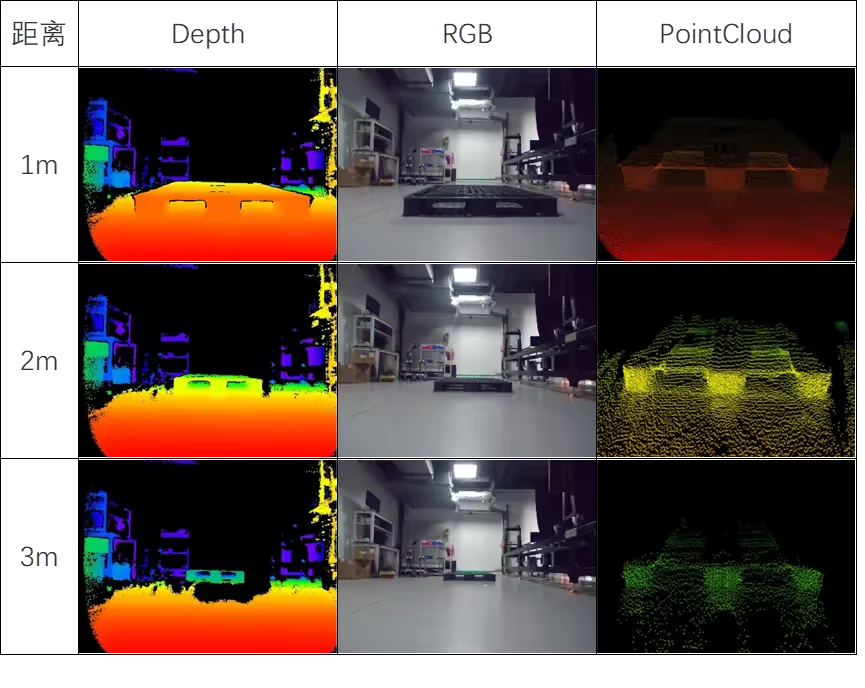
Los resultados de la detección de la cámara ToF de la paleta negra se muestran en la siguiente figura, la profundidad es el mapa de profundidad, RGB es el mapa de color, PointCloud son los datos de la nube de puntos, la nube de puntos original se procesa a través del algoritmo de percepción y la salida final es la posición bidimensional de la paleta en relación con el centro de la carrocería del vehículo.
Detección de apilamiento: medición de la altura de la carga para garantizar la estabilidad del apilamiento de múltiples capas.
Medición de volumen: Calcule el tamaño del paquete (largo x ancho x alto) para la clasificación logística.
(3) Ventajas técnicas de las cámaras ToF
3. Otros transductores
(1) Sensor ultrasónico
1. Principio: Transmite un pulso ultrasónico de 40 kHz a 200 kHz, recibe la señal reflejada para calcular la distancia.
2. Aplicaciones:
Detección/evitación de obstáculos AGV: ángulo de haz típico de 15° a 30° (cobertura de amplia distancia, baja precisión);
Detección de objetos transparentes (vidrio/acrílico);
Es necesario que varios dispositivos eviten la diafonía y que una zona ciega (5-20 cm) sea complementaria al infrarrojo/láser.
3. Ventajas:
Resistente a la interferencia de luz/polvo/niebla, se adapta a entornos industriales complejos;
Costo extremadamente bajo ($10~100 por unidad), larga vida útil (>100,000 veces);
Sin contacto y sin desgaste.
4. Desventajas:
Baja precisión (±1~5 cm, influencia de temperatura y humedad), necesita fusión de múltiples sensores;
Respuesta dinámica lenta (50~100 ms), no aplicable a escenas de alta velocidad (>1,5 m/s);
Interferencia de reflexión por trayectos múltiples, dependiente de algoritmos (como RANSAC), que filtran el ruido
(2) Unidad de medida inercial (IMU)
1. Principio:
Consiste en un giroscopio (que mide la velocidad angular) y un acelerómetro (que mide la aceleración lineal), con un magnetómetro parcialmente integrado para ayudar en la calibración del rumbo;
Genere ángulos de Euler a través de algoritmos de filtrado y resolución de actitudes (por ejemplo, filtrado de Kalman).
2. Aplicaciones:
Navegación AGV: fusión de datos del codificador para compensar la desviación del rumbo y mejorar la precisión del posicionamiento;
Control de actitud dinámico: monitoreo en tiempo real del ángulo de balanceo/cabeceo de la horquilla para ajustar la actitud de la carga;
Posicionamiento sin infraestructura: navegación autónoma en túneles, en interiores y otros escenarios sin GPS.
3. Ventajas:
Totalmente autónomo, no depende de señales externas (GPS/reflectores);
Actualizaciones de alta frecuencia (hasta 1 kHz), en tiempo real;
Resistente a la luz, polvo e interferencias electromagnéticas (excepto magnetómetros).
4. Desventajas:
Error acumulado: la deriva del giroscopio requiere corrección de fusión de múltiples sensores (visión/odómetro);
Dependencia de la calibración: se requiere calibración estacionaria del sesgo cero al inicio, mantenimiento regular;
Alineación inicial: se requiere inicialización de actitud estática horizontal o conocida al inicio
(3) Codificador de cable de tracción
1. Principio: Medición del desplazamiento mediante la combinación de transmisión mecánica y codificador: el cable de tracción (cable de acero/fibra) se mueve y se retrae con el objeto, impulsando el codificador interno para que gire y convierta el desplazamiento en una señal eléctrica (fórmula: desplazamiento = resolución del codificador x número de pulsos x circunferencia de la rueda).
2. Aplicaciones: incluye control de precisión de horquillas AGV (precisión de ±1 mm), nivelación de carrocería de rampa y calibración de esparcidor de contenedores;
3. Ventajas: precisión ultraalta (±0,01 mm), antiinterferencias (polvo/electromagnéticas), recorrido largo (hasta 50 m) e instalación flexible;
4. Desventajas: el desgaste mecánico requiere un mantenimiento regular, el movimiento a alta velocidad es propenso a fluctuaciones (> 1 m/s) y solo admite la medición unidireccional; los múltiples grados de libertad requieren una combinación de varios dispositivos.
(4) Sensor de distancia fotoeléctrico
1. Principio: emite luz infrarroja y detecta la intensidad reflejada; cuanto más cercana sea la distancia, más fuerte será la señal reflejada (no hay un valor de distancia preciso, solo un juicio de umbral).
2. Aplicación: Generalmente se utiliza para evitar obstáculos simples o para detección en el lugar.
3. Ventajas: Muy bajo costo. Medición sin contacto: evita el desgaste mecánico y tiene una larga vida útil. Respuesta rápida: detección en milisegundos. Antiinterferencias electromagnéticas: ideal para entornos industriales complejos.
4. Desventajas: Se ve muy afectado por el color del objeto y el material de la superficie. Interferencia óptica: la luz intensa, la reflexión especular y los objetos transparentes afectan la precisión. Limitaciones del alcance: el valor límite general es mucho menor que el del láser.
Conclusión
Esta guía completa explora cómo las tecnologías de sensores de vanguardia mejoran la inteligencia y la agilidad de los AGV (vehículos guiados automatizados).
Juntas, estas tecnologías forman la base sensorial para soluciones de manipulación de materiales inteligentes, receptivas y altamente automatizadas.
Como empresa especializada en soluciones logísticas inteligentes, AiTEN Robotics se centra en entornos de "fábrica inteligente", integrando a fondo la innovación tecnológica con las demandas del sector y brindando servicios integrales a más de 200 clientes de fabricación en todo el mundo. Con una gama completa de robots de manipulación para cubrir diversos escenarios, un sistema de programación inteligente de desarrollo propio para la industria que permite la colaboración eficiente entre múltiples equipos y un sistema de servicio completo durante todo el ciclo de vida, que abarca desde la planificación, el despliegue y la implementación de preventa hasta la optimización de la operación y el mantenimiento, hemos ayudado a las empresas a lograr la transformación inteligente de la logística y a impulsar la digitalización y el desarrollo de la calidad en la industria manufacturera.

