








How Do AGV Forklifts Perform Path Planning?
_%E7%94%BB%E6%9D%BF%201.avif)
In the fields of modern logistics and industrial automation, automated guided vehicles (AGVs) have become a core technology. These autonomous navigation vehicles play a crucial role in simplifying material handling processes, improving efficiency, and reducing human error. They are capable of completing material handling tasks without human intervention, and one of the key technologies behind this is path planning. So, how do AGV forklifts achieve path planning?
What Is AGV Path Planning?
In simple terms, path planning involves finding the optimal or collision-free path for an AGV to travel from its starting point (point A) to its destination (point B) in a working environment containing obstacles (shelves, workstations, other AGVs). Effective path planning ensures that AGVs can operate harmoniously with their surroundings, maximising throughput and minimising downtime.
Its importance is self-evident:
- Improved efficiency: Optimal paths mean shorter job times and higher throughput.
- Ensured safety: Avoided collisions between AGVs, between AGVs and people or equipment, and ensured the safety of people, machines, and goods.
- Reduced costs: Reduce unnecessary mileage, conserve energy, and extend equipment life.
- System coordination: Allow multiple AGVs to work together as a whole to ensure the smooth operation of the entire system.
The Main Methods of AGV Path Planning
Path planning is not a one-step process; it is typically a multi-layered, dynamic decision-making process.
1. Fixed-track path planning
Magnetic strips, QR codes, or electromagnetic tracks are used for navigation.
Advantages: Stable and reliable, suitable for factories and warehouses with fixed layouts.
Disadvantages: Lack of flexibility; the track must be re-laid when changing paths.
2. Map-based navigation path planning
With the help of technologies such as LiDAR and visual SLAM, AGVs can construct maps of their environment and locate themselves in real time.
Advantages: High flexibility, adaptable to dynamic environments, and capable of trackless navigation.
Disadvantages: High requirements for computing power and sensor accuracy, and relatively high cost.
3. Global Path Planning
This is the top-level design performed before the task begins. The system calculates a theoretical optimal path for the AGV based on a known, static global map (including all fixed obstacle areas). Across the entire factory or warehouse map, the AGV system pre-calculates the global optimal path from the starting point to the endpoint.
Common algorithms: A-Star Algorithm, Dijkstra algorithm, Rapidly Expanding Random Tree algorithm (RRT)
Features: Optimal path planning, suitable for large-scale task allocation.
4. Local Path Planning
Real-time adjustments are made during operation to avoid sudden obstacles or dynamic disturbances.
In actual operation, dynamic obstacles that are not present in the global map are inevitably encountered, such as suddenly appearing workers, temporarily placed pallets, or other moving AGVs. In such cases, local planning is required.
Common methods: artificial potential field method, dynamic window method.
Features: improves safety and adaptability, but the path may not be globally optimal.
Implementation Steps for AGV Path Planning
A complete path planning process typically combines global and local planning, with the following specific steps:
1. Requirements analysis: WMS/MES issues tasks, determining the starting point, end point, load capacity, etc.
2. Environment modelling: Using SLAM technology to construct a two-dimensional or three-dimensional map of the working environment, and marking key points such as obstacle zones, drivable zones, charging stations, and workbenches on the map.
3. Global Path Calculation: The scheduling system uses algorithms to calculate the theoretically optimal path for the AGV on the map.
4. Traffic Management: The system checks whether the path conflicts with the planned paths of other AGVs. If necessary, it coordinates (e.g., having an AGV wait briefly at a node) or replans the path.
5. Path Distribution: The planned path is distributed to the AGV.
6. Local Real-Time Obstacle Avoidance: The AGV travels along the path while sensors continuously scan the environment. Upon detecting an obstacle, it immediately performs obstacle avoidance or rerouting.
7. Task Execution and Feedback: The AGV reaches the target point, completes the task, and feeds back its status to the system.
What Factors Affect Path Planning?
- Environmental complexity: Warehouse shelving, aisle width, and forklift pickup point locations all affect the route.
- Task scheduling: When multiple AGVs are operating simultaneously, congestion must be avoided.
- Safety: In areas where humans and machines work together, safety must be given the highest priority to ensure safe operation in a human-machine coexistence environment.
- Efficiency optimisation: Minimise empty running rates and energy consumption to improve overall logistics efficiency.
Application Cases
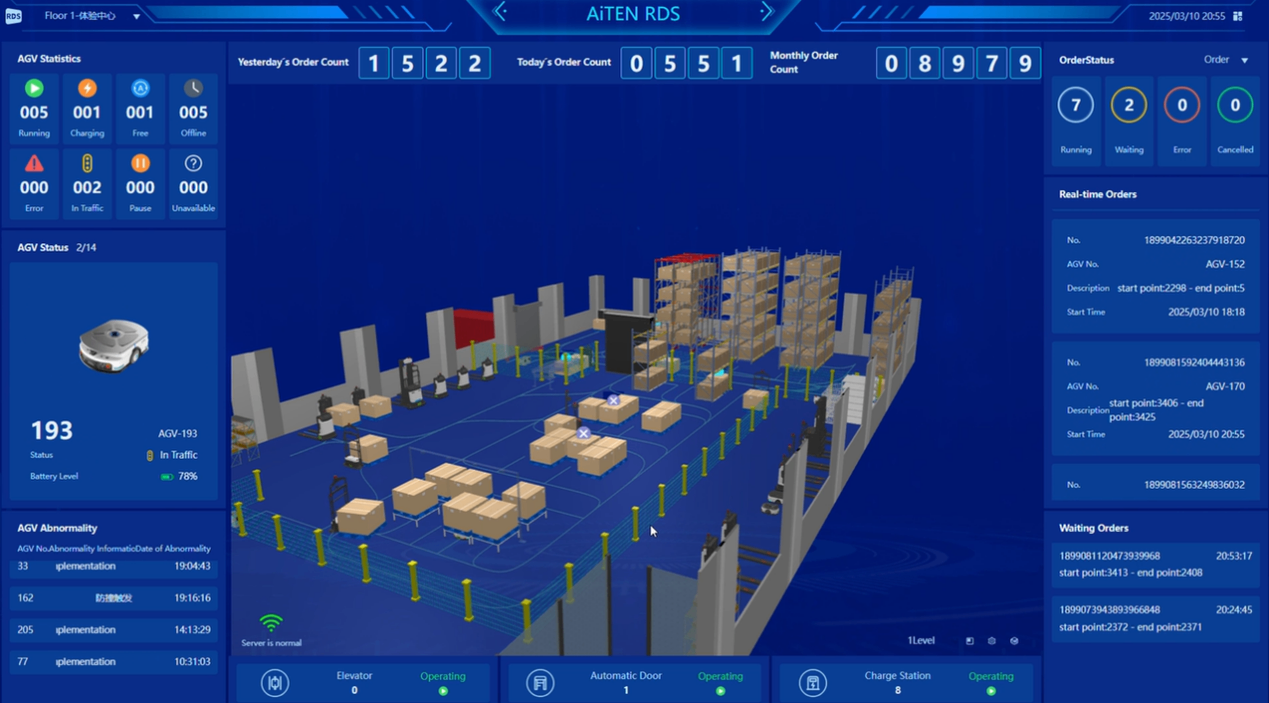
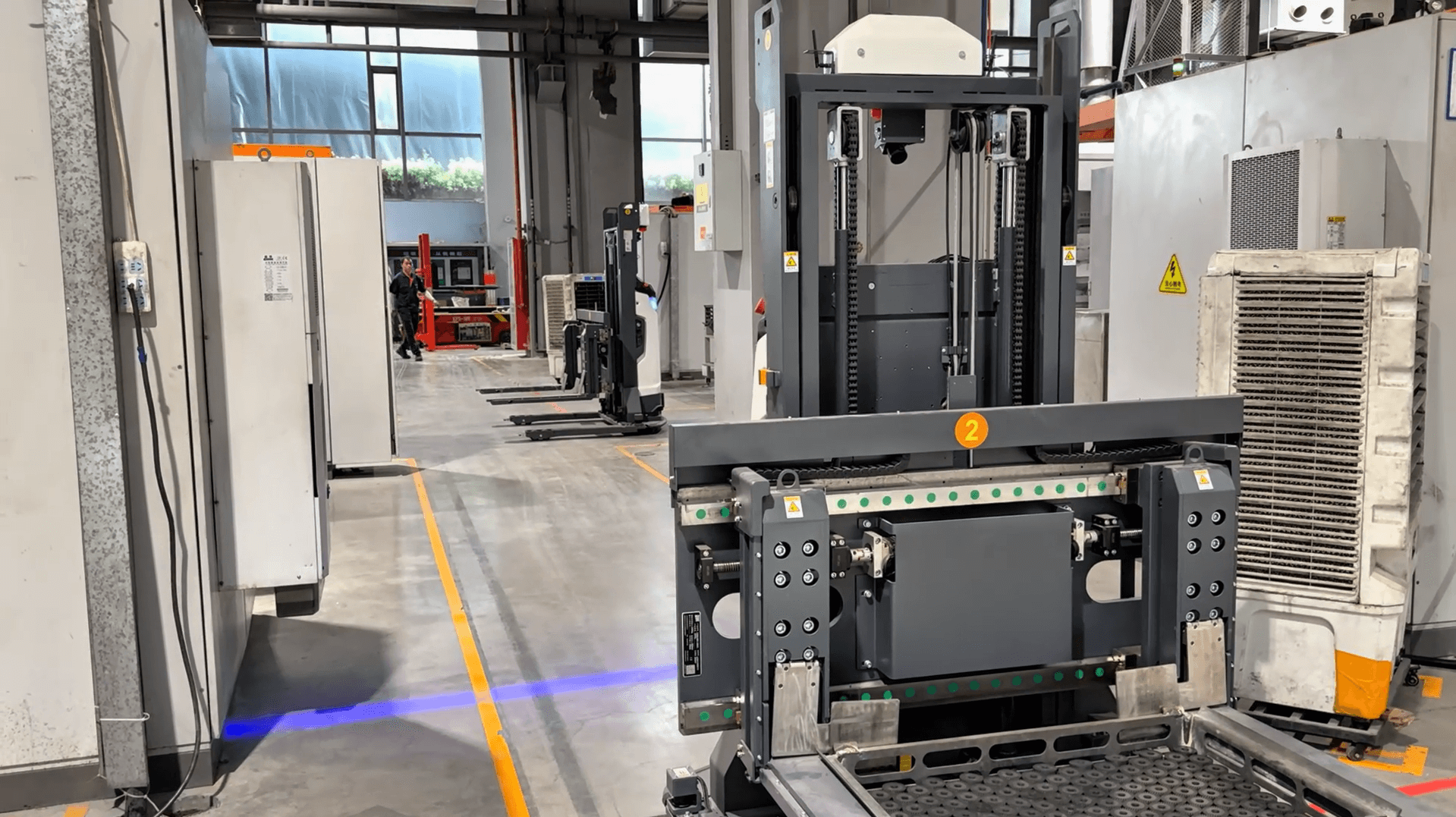
AGV path planning technology has a wide range of applications. For example, AiTEN Robotics' unmanned forklifts use laser SLAM navigation and AI intelligent algorithms to achieve flexible transportation in scenarios such as automotive parts and food processing. The system can not only automatically select the optimal route, but also perform intelligent avoidance and path optimisation when multiple vehicles are in operation, significantly improving warehouse and production efficiency.
In manufacturing plants, AGVs are typically used to transport raw materials, work-in-progress, and finished goods between different workstations. By employing advanced path planning algorithms, AGVs can navigate complex factory layouts, avoid obstacles and other AGVs, and deliver materials and products promptly and efficiently.
In the logistics and warehousing industry, AGVs play a crucial role in inventory management, order fulfilment, and transportation. AGVs can be programmed to navigate, pick up, and transport cargo pallets within warehouses, and even load and unload goods. By optimising path planning, AGVs can move efficiently within warehouses, reducing unnecessary travel and improving order processing speed.
Conclusion
Path planning for AGVs is a core component of logistics automation, ranging from fixed trajectories to intelligent navigation, and from global planning to real-time obstacle avoidance. Different technological choices determine the system's applicable scenarios and efficiency levels. With the continuous development of artificial intelligence and sensor technology, AGV path planning will become increasingly intelligent, providing a solid foundation for the automation upgrades of factories and warehouses.
Selecting an appropriate path planning solution requires a comprehensive consideration of the flexibility requirements of the business scenario, environmental complexity, and investment budget. Understanding the underlying principles will help enterprises better design and implement AGV systems, truly unlocking the potential of intelligent logistics.
About AiTEN Robotics
As a company specialising in intelligent logistics solutions, AiTEN Robotics has consistently focused on the ‘smart factory’ scenario, deeply integrating technological innovation with industry needs. It has provided comprehensive services to over 200 manufacturing clients worldwide: Leveraging a full range of material handling robot product portfolios to cover diverse material handling scenarios, we have developed an industry-grade intelligent scheduling system to enable efficient collaboration among multiple devices. Through a comprehensive lifecycle service system spanning pre-sales planning, deployment and implementation to operations optimization, we empower enterprises to achieve logistics intelligence transformation, continuously driving the digital upgrading and high-quality development of the manufacturing industry.
Contact us to explore automation solutions for your factory.

