








AGV 핸들링 로봇이 일반적으로 사용하는 센서 원리와 장단점, 애플리케이션 소개
_%E7%94%BB%E6%9D%BF%201.avif)

1. 라이다
(1) LiDAR가 실시간으로 고속 타겟을 포착하는 방식을 알아보세요!
LiDAR는 레이저 빔을 발사하여 목표 정보를 감지하는 센서 시스템입니다. 핵심 원리는 레이저를 목표물에 발사하고 반사되는 신호를 수신하여 레이저 왕복 시간을 계산하여 목표물과의 거리를 측정하는 것입니다. 동시에, 장치는 고속으로 회전하며 360도 스캐닝을 수행하고, 고밀도 포인트 클라우드 데이터(대상물 표면의 좌표 집합)를 수집하여 실시간으로 주변 환경의 2D/3D 디지털 모델을 구축합니다. 이 시스템은 목표물의 위치, 속도, 형상 등 다양한 매개변수를 정확하게 측정할 수 있으며, 자율주행, 지도 제작 등 다양한 분야에서 널리 사용되고 있습니다.
1. 포인트 클라우드 데이터는 스캐닝 범위 내에서 LiDAR가 감지한 모든 물체 표면 포인트의 집합입니다. 각 포인트에는 두 가지 유형의 핵심 정보가 포함됩니다.
① 반사율 특성
값 범위: 0-255
확산 반사 물체: 0-150(반사율 0%-100%에 해당)
반사체: 151-255 (예: 금속, 유리)
Note: When the object is <2m away from the Mid-360 radar, the reflectivity error is large, and only the total reflection/diffuse reflection type can be judged.
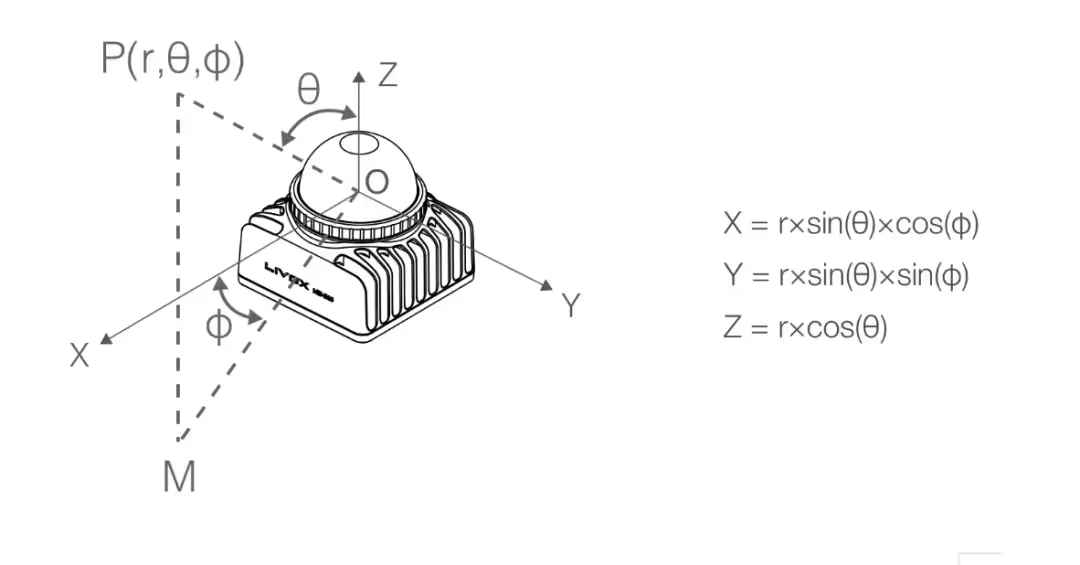
② 공간좌표
좌표계 유형: 데카르트 좌표(x,y,z) 또는 구면 좌표(r,θ,φ).
검출이 효과적인 경우: 실제 좌표 값을 출력합니다.
감지가 유효하지 않은 경우(물체 없음/범위 초과 > 100m):
데카르트 좌표: (0,0,0)
구면 좌표: (0,θ,φ) (현재 스캐닝 각도 정보 유지)
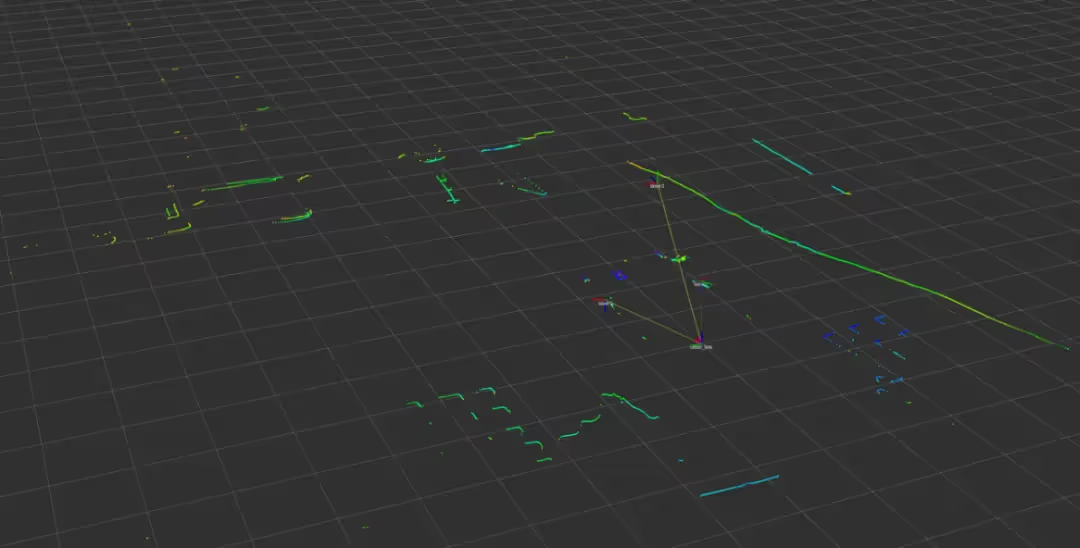
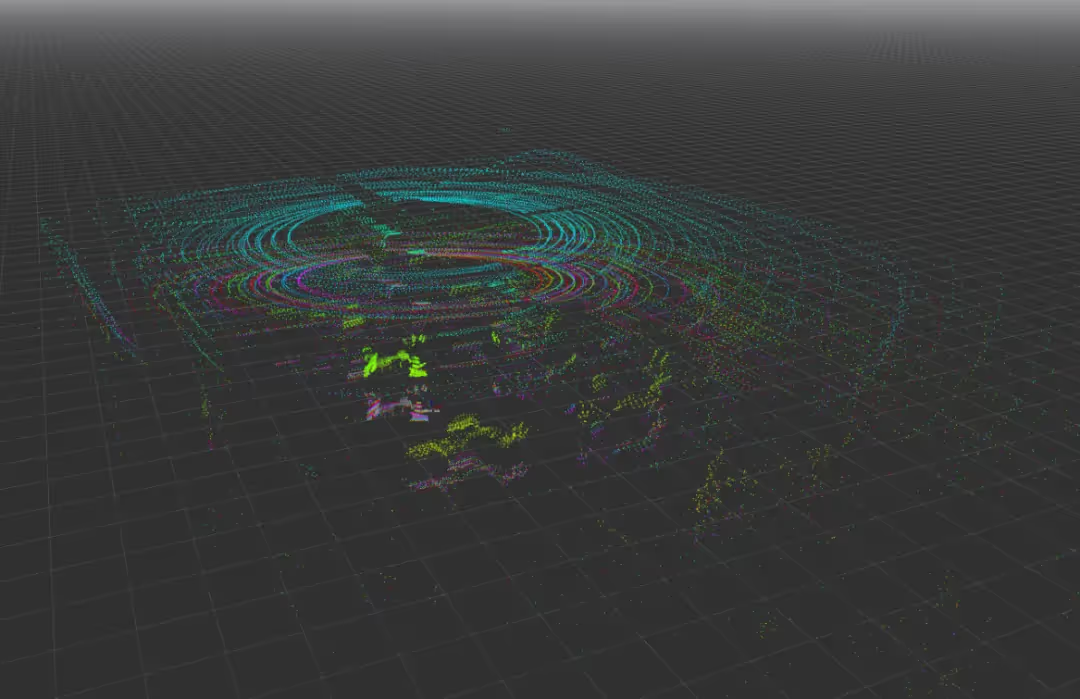
2. LiDAR는 라인 수에 따라 단일 라인 LiDAR와 다중 라인 LiDAR로 구분할 수 있습니다. 단일 라인 LiDAR는 단일 라인 레이더에서 발사된 레이저 광원을 사용하여 2D 평면 스캐닝 지도에 접근하는 것을 의미하며, 다중 라인 LiDAR는 여러 개의 레이저 빔을 동시에 발사하고 수신하여 회전하는 거리 측정 레이더를 의미합니다. 현재 시장에는 4라인, 8라인, 16라인, 32라인, 64라인, 128라인 포인트가 있습니다. 다중 라인 LiDAR는 물체의 높이 정보를 인식하고 주변 환경의 3D 스캔을 얻을 수 있습니다. 그림은 2D 및 3D 포인트 클라우드의 시각화를 보여줍니다.
(2) 내비게이션이 항상 가고 싶은 방향을 추측하는 이유는 무엇입니까?
레이저 내비게이션은 AGV 시스템에서 일반적으로 사용되는 내비게이션 방식입니다. 레이저 내비게이션 원리에 따라 AGV는 내비게이션 영역 내에서 자유롭게 이동하며 정확한 위치를 파악할 수 있습니다. 내비게이션 범위 내에서 차량의 주행 경로는 실제 상황에 따라 언제든지 변경될 수 있어 AGV의 유연성을 최대한 활용하고 생산 효율을 향상시킬 수 있습니다. 많은 시스템이 기존 현장 조건에서 구현되어야 하며, 특히 레이저 내비게이션 AGV 시스템에 적합합니다.
1. 레이저 항법의 핵심 원리는 두 가지 주요 원리로 요약할 수 있습니다.
① 지도 구축(처음으로 주변 환경을 학습)
AGV가 처음 시동을 걸면 LiDAR로 주변을 사방에서 스캔합니다. 마치 '레이저 포인터로 방을 스캔하는 것'과 같습니다.
SLAM 기술(Autonomous Localization + Mapping)을 활용하여 벽이나 장비 등 고정된 물체의 위치를 기록하여 주변 환경의 디지털 지도를 생성합니다.
②실시간 위치추적(항해 시 위치탐지)
AGV가 이동하는 동안 LiDAR는 주변 환경의 '스냅샷' 포인트 클라우드를 지속적으로 스캔하고 실시간으로 수집합니다.
실시간 데이터는 저장된 지도와 비교되고(차이점 찾기 게임과 유사), 알고리즘은 AGV의 현재 정확한 위치와 방향을 계산합니다.

2. 레이저 내비게이션 기능:
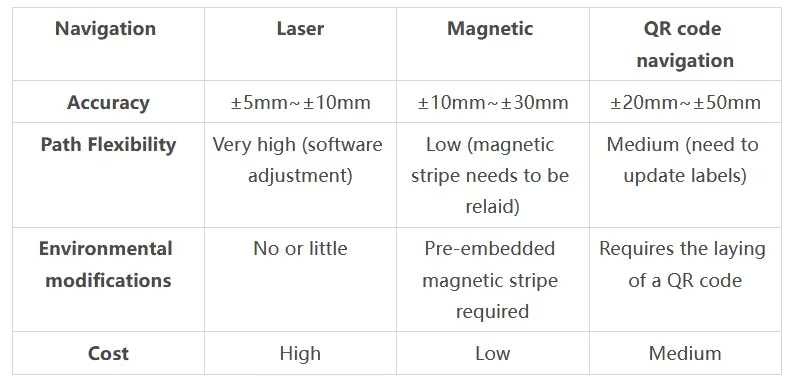
고정밀 위치 지정 및 탐색 기능으로, 적재 및 픽앤플레이스 물품과 같이 정확도에 대한 요구 사항이 엄격한 현장에 적합합니다. 환경 적응성이 강하고 복잡한 현장도 어느 정도 호환성이 있으며, 조명 변화, 약간의 지면 고르지 않음 및 기타 간섭에도 대처할 수 있지만, 거리 측정 정확도에 영향을 줄 수 있는 강한 빛이 LiDAR에 직접 닿지 않도록 해야 합니다. 고정 경로 제한이 없으며, 자기 가이드나 2차원 코드 탐색과 달리 레이저 탐색에는 자기 스트립을 미리 내장하거나 라벨을 놓을 필요가 없으며, 소프트웨어를 통해 경로를 자유롭게 수정할 수 있습니다. 지능성과 확장성이 뛰어나며 다중 차량 협력이 가능하고, 중앙 스케줄링 시스템을 통해 지도와 실시간 위치 정보를 공유하여 교차 경로 회피, 작업 할당과 같은 다중 AGV 협력 작업을 실현합니다.
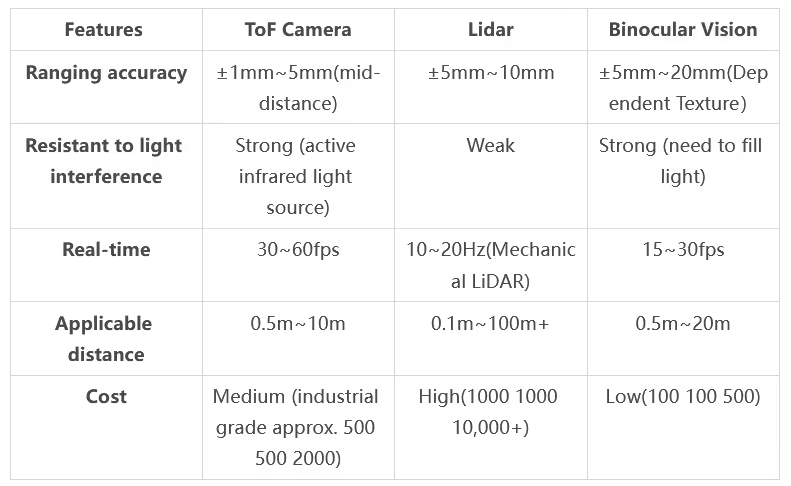
표에 표시된 다른 탐색 방법과 비교해 보세요.
(3) AI가 몇 초 안에 장애물을 피하는 조건 반사는 어떻게 이루어지나요?
1. 레이저 장애물 회피 원리
레이저 레이더의 실시간 스캐닝을 통해 환경 포인트 클라우드 데이터를 생성하고, 최초의 지능형 알고리즘은 인접한 포인트 클라우드를 장애물 클러스터로 집계하여 정적 객체(위치가 변하지 않음)와 동적 객체(위치가 변경되고 궤적이 예측 가능함)를 구별합니다. 동시에 여러 레이더 데이터의 동시 스캐닝과 결합하여 주변 환경에 대한 통합된 차체 중심 분석을 통해 차량 외부의 모든 포인트 클라우드를 장애물로 표시하고 위험을 피하기 위한 안전한 경로를 실시간으로 계획합니다.
2. 장애물 회피 유형
단일 라인 LiDAR(예: SICK TIM 시리즈): 저렴하고 평면 2D 장애물 회피에 사용됩니다.
다중 라인 LiDAR(예: Livox Mid360, Velodyne VLP-16): 3D 장애물 회피, 낮거나 튀어나온 물체를 방지하기 위해 공간적 높이 정보를 감지합니다.
3. 장애물 회피 레이더 설치 위치
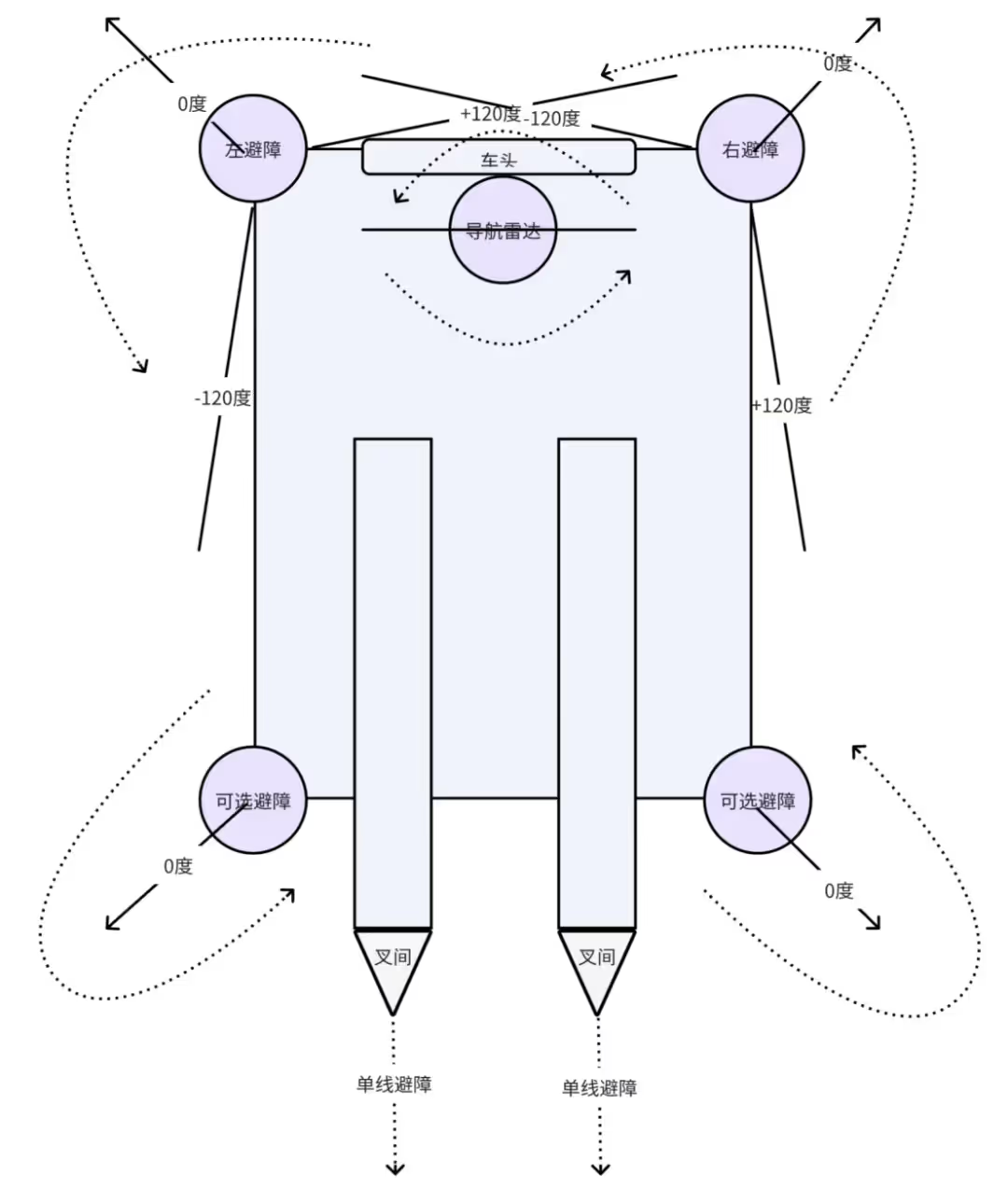
그림과 같이 주로 전/후방 주요 장애물 회피, 차체 양쪽 측면 보호, 그리고 상부 글로벌 모니터링에 사용됩니다. 차량의 전/후방은 일반적으로 차체 네 모서리에 설치되며, 레이더는 레이더 앞쪽으로 바깥쪽으로 기울어집니다. 차체 양쪽 측면 보호는 일반적으로 네 모서리의 레이더 스캐닝 범위에 포함됩니다. 상부 글로벌 모니터링 시스템은 일반적으로 장애물 회피를 위해 항법 레이더를 동시에 사용합니다.
레이더가 바로 앞 0도일 때, 차체 가장자리를 감지하는 범위는 ±135도입니다. 하지만 차체 간섭으로 인해 차체에 가까운 부분은 필터링해야 하므로 FOV 범위는 일반적으로 ±120도로 설정됩니다. 포크 사이에서는 일반적으로 각도별 장애물 회피 없이 단일 선만 감지합니다.
4. 360도 공간 주변 장애물 회피
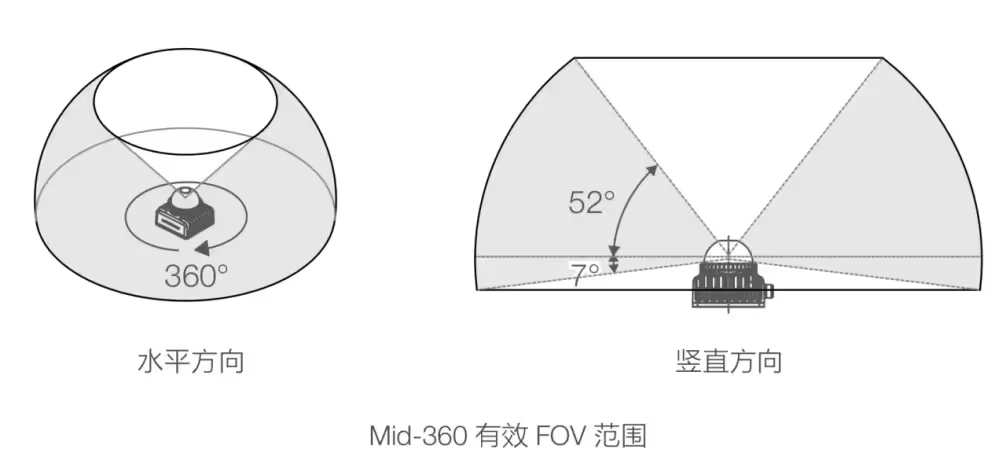
원형을 중심으로 차체 전반의 스캐닝 범위를 확보하기 위해 2D 및 3D 레이더 설치 위치가 필요합니다.
예를 들어 3D 레이더부터 Mid360까지의 레이더는 그림에서 볼 수 있듯이 좌표의 정의와 스캐닝 범위의 최대 범위를 알아야 합니다.
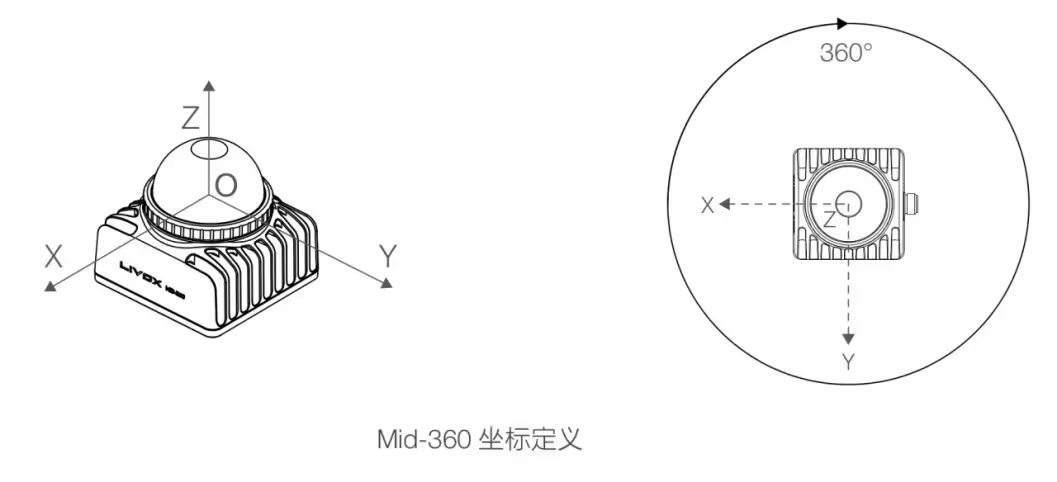
기본 구성은 다음과 같습니다. 3D 레이더 1개를 전방 항법 레이더 아래에 수직 또는 위쪽으로 기울여 설치하고, 3D 레이더 1개를 차체 양쪽에 수직 또는 위쪽으로 기울여 설치하고, 3D 레이더 1개를 차체 후면 포크 아래에 수직 또는 위쪽으로 기울여 설치하고, 광전자 IO를 사용하여 포크 사이의 장애물을 피합니다.
5. 기술적 장점 및 한계
장점: 높은 정확도: 밀리미터급 거리 측정 정확도로 초음파나 적외선 센서보다 훨씬 높습니다. 간섭 방지: 주변광, 먼지, 전자기장의 영향을 받지 않습니다(비전 센서 대비). 빠른 응답: 스캐닝 주파수는 일반적으로 10Hz~50Hz로 고속 AGV(≥1.5m/s)에 적합합니다.
(4) 핸들링 로봇의 레이저 네비게이션
1. 레이저 감지 원리 개요:
3D 레이더를 통해 포인트 클라우드 데이터를 얻은 후, 먼저 먼지, 유리 반사 등의 간섭 정보를 필터링하고, 지능형 알고리즘을 통해 선반 모서리, 벽 모서리, 팔레트 포크 구멍 등의 주요 구조적 특징을 추출합니다. 마지막으로 대상 객체를 좌표계에 정확하게 매핑하고, 위치 및 제스처 정보를 출력하며, 의미론을 적용한 로컬 환경 맵을 구축하여 '객체를 보고 장면을 이해하는' 지능형 인식을 실현합니다. '지능적 인식'입니다.
2. 팔레트 식별 및 위치 지정
3. 포크 정렬

4. 자동 스태킹

5. 기술적 장점 및 한계
장점: 높은 정확도: 레이저 거리 측정 정확도는 ±1mm에 달하여 산업용 팔레트 작업의 요구를 충족합니다. 주변광 간섭에 강함: 비전 솔루션과 달리 레이저는 빛의 변화에 영향을 받지 않습니다. 뛰어난 실시간성: 10Hz~50Hz의 스캐닝 주파수로 고속 물류 환경에 적합합니다.
한계점: 높은 비용: LiDAR 가격은 초음파, 특히 다중선 레이더보다 상당히 높습니다. 특수 재질의 영향: 흑색광을 흡수하는 물체나 반사하는 물체는 감지 신뢰성을 저하시킬 수 있습니다. 계산 복잡도: 실시간 포인트 클라우드 처리에는 높은 컴퓨팅 파워가 필요합니다(임베디드 GPU 또는 전용 프로세서 필요).
Ⅱ. 카메라
(1) ToF가 광파를 이용해 밀리미터 단위의 '공간 측정'을 달성하는 방식
비행시간(ToF)은 3대 주류 3D 이미징 기술 중 하나(나머지 두 기술은 구조광 및 양안 스테레오 비전)입니다. 원리는 근적외선을 방출하고 빛의 왕복 시간을 계산하여 물체의 거리 정보(깊이)를 직접 얻는 것입니다. 다른 기술과 비교했을 때 ToF는 계산이 간단하고, 간섭에 강하며, 장거리 측정이 가능하다는 장점이 있어 휴대폰 후면 카메라(예: 화웨이/오포/애플), 산업 자동화, AGV 내비게이션, 로봇 그립 등에 널리 사용됩니다.
1. 디토프
dToF(Direct Time-of-Flight Ranging)는 세 가지 핵심 구성 요소로 구성됩니다.
① VCSEL: 나노초 레이저 펄스를 방출합니다.
② SPAD(Single Photon Avalanche Diode) : 단일 광자 레벨에서 반사되는 광 신호를 검출합니다.
③ TDC(Time-to-Digital Converter) : 광펄스의 왕복시간을 정확하게 기록합니다.
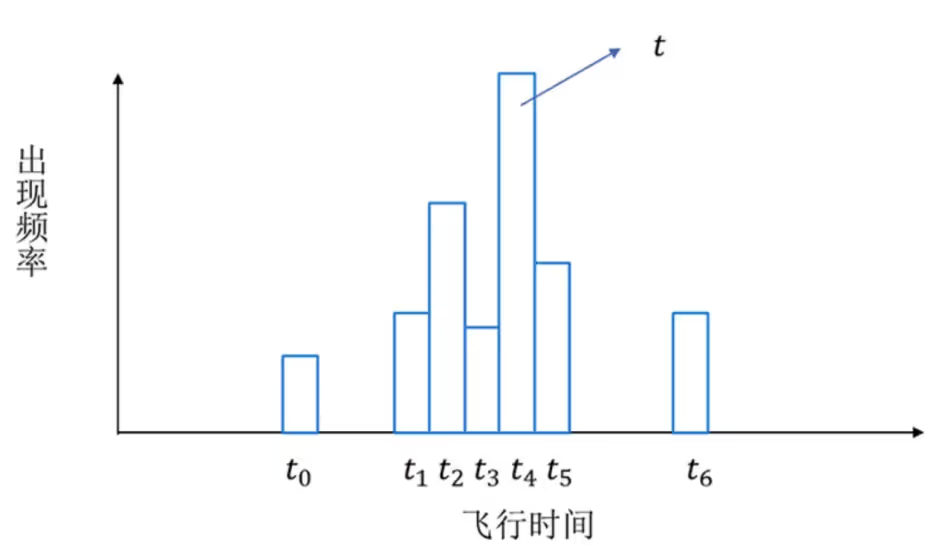
작동 원리는 다음과 같습니다. 단일 프레임에서 N개의 펄스를 송수신하고, TDC를 통과할 때마다 비행 시간을 기록하여 히스토그램을 생성하고, 가장 높은 주파수 시간 t를 이용하여 깊이(d = ct/2)를 계산합니다. 이 기술은 통계적 최적화를 통해 간섭 방지 성능을 크게 향상시키고 고정밀 깊이 측정을 달성합니다.
dToF의 원리는 매우 간단해 보이지만, 높은 정확도를 달성하기는 어렵습니다. 클록 동기화에 대한 매우 높은 정확도 요구 사항 외에도 펄스 신호의 정확도에 대한 높은 요구 사항이 있습니다. 일반 포토다이오드는 이러한 요구를 충족하기 어렵습니다. dToF의 핵심 부품인 SPAD는 생산 공정의 복잡성과 집적화 어려움으로 인해 생산 가능한 제조업체가 많지 않습니다. 따라서 현재 dToF를 연구하는 제조업체는 많지 않으며, iToF를 연구하고 홍보하는 제조업체는 점점 더 늘어나고 있습니다.
2. 이토프
iToF의 개념은 dToF에 해당하며, 전체 명칭은 간접 Time-of-Flight(간접 Time-of-Flight)로, 간접 광 Time-of-Flight로 직역할 수 있습니다. 간접적이라는 것은 iToF가 빛의 Time-of-Flight를 직접 측정하는 대신 위상 변화를 측정하여 간접적으로 빛의 Time-of-Flight를 측정한다는 것을 의미합니다. iToF는 변조된 적외선 신호를 현장으로 송신하고, 센서는 현장 내 측정 대상 물체에서 반사되는 광 신호를 수신합니다. 그런 다음 노출(적분) 시간 동안 축적된 전하를 기반으로 송신 신호와 수신 신호의 위상차를 계산하여 대상 물체의 깊이를 구합니다. 그림과 같이 물체의 깊이를 구합니다.
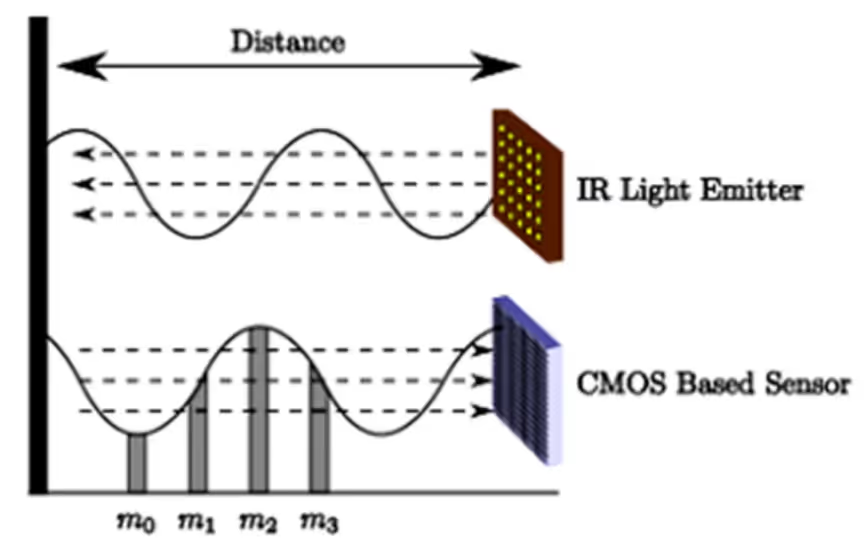
iToF 모듈의 핵심 구성 요소는 VCSEL과 이미지 센서로 구성됩니다. VCSEL은 특정 주파수로 변조된 적외선을 방출합니다. 이미지 센서는 반사된 빛을 수신하여 노출(적분) 시간 동안 광전 변환을 수행합니다. 노출(적분)이 끝나면 데이터는 판독되어 아날로그-디지털 변환기를 거쳐 계산 장치로 전달되고, 계산 장치는 각 픽셀의 위상 변화를 계산합니다. iToF는 4 샘플링 버킷 알고리즘을 사용하여 깊이를 계산합니다. 이 알고리즘은 0°, 90°, 180°, 270°의 위상 지연을 갖는 4개의 샘플을 사용하여 깊이를 계산합니다. 그림과 같이,

3. 깊이 맵 생성
양안 스테레오 비전은 좌우 카메라를 사용하여 객체를 동시에 촬영하고, 시차(이미지에서 객체의 위치 차이)를 사용하여 인간의 눈이 거리를 인지하는 방식과 유사하게 깊이를 계산합니다. 반면 ToF 카메라는 각 픽셀의 비행 시간 거리 값을 직접 기록하여 고해상도 깊이 맵(예: 640×480)을 생성하고, RGB 카메라와 결합하여 다채로운 3D 포인트 클라우드를 구축합니다. 둘 다 3D 환경 모델링을 위한 핵심 기술입니다.
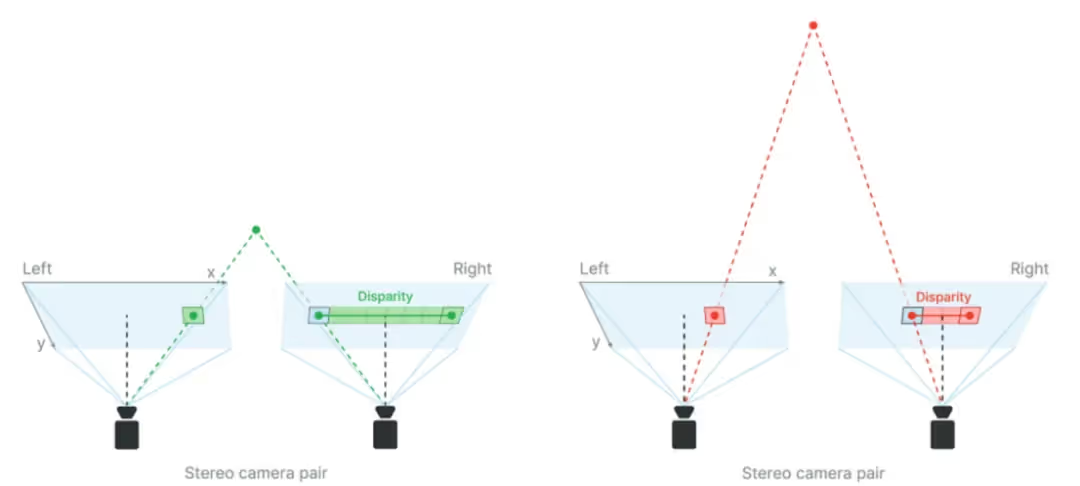
시차 원리 도식적 깊이 맵 계산 공식:

기준선 거리가 더 길거나 초점 거리가 더 길면 동일한 시차에서 더 깊은 심도를 얻을 수 있으며, 이는 더 나은 심도 정확도를 의미합니다. 초점 거리는 카메라 렌즈와 이미지 센서 사이의 거리입니다. 초점 거리가 길수록 시야(FOV)가 좁아집니다. 따라서 장거리 심도 인식을 얻으려면 기준선 거리를 늘리거나 FOV를 줄일 수 있습니다.
(2) AGV 분야에서의 ToF 카메라의 적용
1. 장애물 회피 및 안전 보호
동적 장애물 회피: 5m 이내 장애물(예: 사람, 지게차, 선반)을 실시간으로 감지하여 감속 또는 비상 정지를 실행합니다. 다단계 안전 구역(예: 1m 이내 경고, 0.3m 이내 비상 정지). 저상 장애물 감지: 지면에 있는 팔레트, 화물 상자 등을 감지하여 AGV의 충돌이나 파손을 방지합니다.
2. 팔레트 식별 및 포크 피킹
팔레트 위치 지정: 깊이 맵을 통해 팔레트의 포크 구멍 위치를 ±3mm 정확도로 식별하며, 다양한 팔레트 유형(목재, 플라스틱, 금속)에 맞춰 조정합니다. 자동 포크 피킹: AGV 모션 제어와 결합하여 포크 암 위치를 조정하여 정확한 삽입을 보장합니다.
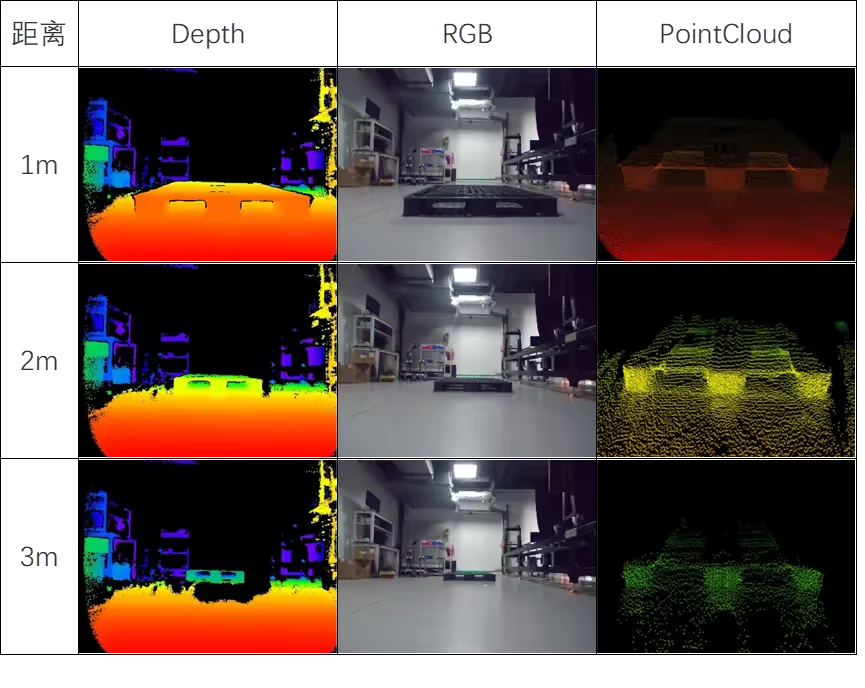
ToF 카메라가 검은색 팔레트를 감지한 결과는 다음 그림과 같습니다. depth는 깊이 맵, RGB는 색상 맵, PointCloud는 포인트 클라우드 데이터입니다. 원래 포인트 클라우드는 인식 알고리즘을 통해 처리되고 최종 출력은 차량 본체 중심에 대한 팔레트의 2차원 위치입니다.
적재 감지: 다층 적재 안정성을 보장하기 위해 화물 높이를 측정합니다.
부피 측정: 물류 분류를 위해 소포 크기(L x W x H)를 계산합니다.
(3) ToF 카메라의 기술적 장점
Ⅲ. 기타 트랜스듀서
(1) 초음파 센서
1. 원리: 40kHz-200kHz 초음파 펄스를 발사하고, 반사되는 신호를 받아 거리를 계산합니다.
2. 응용 프로그램:
AGV 장애물 회피/제자리 감지: 일반적인 빔 각도 15°~30°(넓은 거리 적용, 정확도 낮음)
투명 물체 감지(유리/아크릴)
여러 장치가 크로스토크를 방지해야 하며, 사각 지대(5~20cm)는 적외선/레이저 보완이어야 합니다.
3. 장점:
빛/먼지/안개 간섭에 강하고 산업단지 환경에 적합합니다.
매우 낮은 비용(단위당 10~100달러), 긴 수명(>100,000회)
비접촉식이며 마모나 파손이 없습니다.
4. 단점:
낮은 정밀도(±1~5cm, 온도 및 습도 영향), 다중 센서 융합이 필요함
느린 동적 반응(50~100ms), 고속 장면(>1.5m/s)에는 적용 불가
다중 경로 반사 간섭, 알고리즘(예: RANSAC), 필터링 노이즈에 따라 다름
(2) 관성측정장치(IMU)
1. 원리:
이는 자이로스코프(각속도 측정)와 가속도계(선형 가속도 측정)로 구성되며, 방위 교정을 돕기 위해 부분적으로 통합된 자기계가 있습니다.
자세 해결 및 필터링 알고리즘(예: 칼만 필터링)을 통해 오일러 각도를 출력합니다.
2. 응용 프로그램:
AGV 탐색: 인코더 데이터를 융합하여 방향 편차를 보정하고 위치 정확도를 개선합니다.
동적 자세 제어: 포크 피치/롤 각도를 실시간으로 모니터링하여 화물 자세를 조정합니다.
인프라가 필요 없는 위치 지정: 터널, 실내 및 기타 GPS가 필요 없는 상황에서의 자율 주행.
3. 장점:
완전 자율형, 외부 신호(GPS/반사경)에 의존하지 않음
고주파 업데이트(최대 1kHz), 실시간
빛/먼지/전자기 간섭에 강함(자력계 제외).
4. 단점:
누적된 오류: 자이로스코프 드리프트에는 다중 센서(비전/주행거리계) 융합 보정이 필요합니다.
교정 의존성: 시동 시 제로 바이어스의 고정 교정이 필요하고 정기적인 유지 관리가 필요합니다.
초기 정렬: 시작 시 수평 정적 또는 알려진 자세 초기화가 필요합니다.
(3) 풀와이어 인코더
1. 원리: 기계적 전달과 인코더의 결합을 통한 변위 측정: 풀 와이어(강철 와이어/섬유)가 물체와 함께 움직이고 수축하면서 내부 인코더를 회전시키고 변위를 전기 신호로 변환합니다(수식: 변위 = 인코더 분해능 x 펄스 수 x 휠 원주)
2. 적용 분야: AGV 포크 정밀 제어(±1mm 정확도), 램프 차체 수평 조절 및 컨테이너 스프레더 교정 포함
3. 장점: 초고정밀도(±0.01mm), 방진(먼지/전자파), 장거리 이동(최대 50m) 및 유연한 설치;
4. 단점: 기계적 마모로 인해 정기적인 유지관리가 필요하고, 고속 이동 시 흔들림이 발생하기 쉬우며(>1m/s), 단방향 측정만 지원하며, 다자유도 측정을 위해서는 여러 장비의 조합이 필요함
(4) 광전 거리 센서
1. 원리: 적외선을 방출하고 반사되는 강도를 감지합니다. 거리가 가까울수록 반사 신호가 강해집니다(정확한 거리 값은 없고 임계값만 판단).
2. 응용 분야: 일반적으로 간단한 장애물 회피나 제자리 감지에 사용됩니다.
3. 장점: 매우 저렴한 비용. 비접촉 측정: 기계적 마모 방지, 긴 수명. 고속 응답: 밀리초 단위 감지. 전자파 간섭 방지: 산업 단지 환경에 적합.
4. 단점: 물체 색상과 표면 재질의 영향을 크게 받습니다. 광학 간섭: 강한 빛, 정반사, 투명한 물체는 정확도에 영향을 미칩니다. 거리 측정 범위 제한이 있으며, 일반적인 거리 측정 한계값은 레이저 거리 측정 한계값보다 훨씬 낮습니다.
결론
이 포괄적인 가이드에서는 최첨단 센서 기술이 AGV(무인 운반 차량)의 지능과 민첩성을 어떻게 향상시키는지 살펴봅니다.
이러한 기술이 합쳐져 지능적이고 반응성이 뛰어나며 고도로 자동화된 재료 처리 솔루션을 위한 감각적 기반을 형성합니다.
지능형 물류 솔루션 분야 기업으로서 AiTEN Robotics는 항상 '스마트 팩토리' 시나리오에 집중하고, 기술 혁신과 산업 수요를 심층적으로 통합하며, 전 세계 200개 이상의 제조 고객에게 종합적인 서비스를 제공해 왔습니다. 다양한 처리 시나리오를 포괄하는 광범위한 처리 로봇 제품군, 자체 개발한 산업 수준의 지능형 스케줄링 시스템을 통해 여러 장비의 효율적인 협업을 실현하고, 자체 개발한 산업 수준의 지능형 스케줄링 시스템을 통해 여러 장비의 효율적인 협업을 실현합니다. 전 세계 200개 이상의 제조 고객에게 포괄적인 서비스를 제공해 왔습니다. 다양한 처리 시나리오를 포괄하는 광범위한 처리 로봇 제품군, 자체 개발한 산업 수준의 지능형 스케줄링 시스템을 통해 여러 장비의 효율적인 협업을 실현하고, 사전 판매 계획, 구축 및 구현부터 운영 및 유지보수 최적화까지 아우르는 전체 수명 주기 서비스 시스템을 통해, AiTEN Robotics는 기업이 물류의 지능형 변혁을 실현하도록 지원하고, 제조 산업의 디지털 업그레이드 및 품질 향상에 지속적으로 기여해 왔습니다.

