








Enthüllung des dynamischen Bahnplanungsalgorithmus in AGVs
_%E7%94%BB%E6%9D%BF%201.avif)
In der modernen Lagerhaltung, Logistik und Fertigung sind fahrerlose Transportsysteme (AGVs) immer häufiger anzutreffen. Wie fleißige Arbeiterameisen navigieren sie selbstständig durch komplexe Umgebungen und erledigen effizient Materialtransportaufgaben. Eine der Kerntechnologien, die AGVs eine intelligente Navigation ermöglichen, ist die Bahnplanung. Vor allem, wenn die Umgebung nicht statisch ist, sind dynamische Bahnplanungsfunktionen von entscheidender Bedeutung. In diesem Artikel werden mehrere gängige dynamische Bahnplanungsalgorithmen (wie A, Dijkstra, RRT usw.) vorgestellt und erläutert, wie sie die FTS-Branche maßgeblich beeinflussen.
Warum ist eine dynamische Trassenplanung notwendig?
Bei der traditionellen statischen Bahnplanung wird davon ausgegangen, dass die Umgebung vollständig bekannt ist und unverändert bleibt, während das FTS seine Aufgaben erfüllt. Die reale Welt ist jedoch voller Variablen:
- Plötzlich auftauchende temporäre Hindernisse (wie umgestürzte Ladung, Fußgänger oder andere Fahrzeuge)
- Änderung der Verkehrskontrollbereiche
- Vorübergehende Anpassungen von Zielpunkten oder Aufgaben
In diesen Situationen müssen die FTS in der Lage sein, Veränderungen in ihrer Umgebung in Echtzeit zu erkennen und ihre Routen schnell neu zu planen. An dieser Stelle kommt die dynamische Bahnplanung ins Spiel. Sie gibt FTS die Intelligenz, sich an veränderte Umstände anzupassen und gewährleistet, dass sie in komplexen und dynamischen Umgebungen weiterhin sicher und effizient arbeiten können.
Analyse der gängigen Trassenplanungsalgorithmen
1. Dijkstras Algorithmus
Der Dijkstra-Algorithmus ist ein klassischer Graph-Suchalgorithmus, der verwendet wird, um den kürzesten Weg von einem einzelnen Ausgangsknoten zu allen anderen Knoten in einem Graphen zu finden.
Kerngedanke:
Ausgehend vom Quellknoten breitet sich der Algorithmus wie Wellen im Wasser aus. Jedes Mal besucht er den nächstgelegenen unbesuchten Knoten zum Quellknoten und aktualisiert die Entfernungen zu seinen Nachbarn.
Prozess:
- Initialisierung: Setzen Sie die Entfernung vom Startpunkt auf 0 und die Entfernungen von anderen Punkten auf unendlich. Erstellen Sie eine Prioritätswarteschlange der zu besuchenden Knoten (sortiert nach Entfernung).
- Iteration: Entfernen Sie den Knoten u mit dem kleinsten Abstand aus der Warteschlange.
- Lockerung: Wenn der Weg von u nach v kürzer ist, aktualisieren Sie für jeden Nachbarn v von u die Entfernung von v und fügen ihn der Warteschlange hinzu.
- Markieren: Markieren Sie u als besucht.
- Wiederholen Sie: Fahren Sie fort, bis der Zielknoten abgerufen wurde oder die Warteschlange leer ist.
AGV-Anwendung:
- Vorteile: Garantiert das Finden des globalen kürzesten Weges (wenn die Kantengewichte nicht negativ sind).
- Benachteiligungen: Großer Suchbereich, keine Richtungsabhängigkeit, geringe Berechnungseffizienz (insbesondere bei großen Karten). Dynamische Hindernisse erfordern eine Neuberechnung des globalen Pfades, was zu einer schlechten Echtzeitleistung führt.
- Positionierung: Wird oft als Grundlage für andere Algorithmen (wie A*) oder in einfachen Umgebungen verwendet.
2. A* Algorithmus
Der A* (A-Star)-Algorithmus ist eine Optimierung des Dijkstra-Algorithmus. Er führt heuristische Informationen ein, um die Suchrichtung zu lenken und dadurch das Ziel schneller zu finden.
Kerngedanke: Bei der Auswahl des nächsten zu besuchenden Knotens sind folgende Punkte gleichzeitig zu berücksichtigen:
- g(n): Die tatsächlichen Kosten des Weges vom Startpunkt zum Knoten n.
- h(n): Die geschätzten Kosten vom Knoten n zum Ziel (eine heuristische Funktion, z. B. Manhattan/Euklidischer Abstand).
- Bewertungsfunktion: f(n) = g(n) + h(n)
- Hauptanforderungen: h(n) muss Zulässigkeit (geschätzter Wert ≤ tatsächlicher Wert) und Stetigkeit erfüllen, um das Finden der optimalen Lösung zu gewährleisten.
Verfahren: Ähnlich wie bei Dijkstra, aber die Prioritätswarteschlange wird nach f(n) sortiert, und die Knoten mit dem kleinsten f(n) werden bei der Expansion bevorzugt, wodurch die Suche stärker auf das Ziel ausgerichtet wird.
AGV-Anwendung:
- Vorteile: Garantiert den optimalen Weg, wenn die heuristische Funktion die Bedingungen erfüllt, und ist in der Regel viel effizienter als Dijkstra. Weit verbreitet in der globalen FTS-Bahnplanung.
- Nachteilig: Die Leistung wird durch die Wahl der heuristischen Funktion beeinflusst; der Speicherverbrauch kann hoch sein; eine Neuplanung ist weiterhin erforderlich, wenn sich die Umgebung häufig ändert.
- Dynamische Varianten: Für dynamische Umgebungen gibt es Algorithmen wie D*, LPA* und D* Lite. Diese Algorithmen können die Pfade schrittweise aktualisieren (anstatt sie vollständig neu zu berechnen), wenn sich die Umgebung ändert, was die Reaktionsgeschwindigkeit erheblich verbessert. D* Lite ist ein häufig verwendeter Algorithmus für die dynamische Hindernisvermeidung bei FTS.

3. RRT*-Algorithmus
RRT* (Rapidly-exploring Random Tree Star) ist ein auf Stichproben basierender Pfadplanungsalgorithmus, der sich besonders für hochdimensionale Räume und komplexe Randbedingungen (wie Fahrzeugkinematik) eignet.
Kerngedanke:
Durch zufällige Abtastung von Punkten im Zustandsraum baut der Algorithmus schrittweise einen Baum auf, ausgehend vom Ursprung, um den Raum zu erkunden. RRT* ist eine optimierte Version von RRT, die einen Umverdrahtungsschritt enthält, damit sich der Pfad asymptotisch der Optimalität annähert (je mehr Stichprobenpunkte, desto näher ist der Pfad an der Optimalität).
Prozess:
- Probenahme: Zufällige Erzeugung eines Punktes x_rand im Zustandsraum.
- Nächsten Nachbarn finden: Finde den Knoten x_nearest im Baum, der x_rand am nächsten ist.
- Erweitern (Lenken): Erweitern Sie eine Schrittlänge von x_nearest nach x_rand (unter Vermeidung von Hindernissen), um den neuen Knoten x_new zu erhalten.
- Auswahl des übergeordneten Knotens (RRT*-spezifisch): Suche nach Knoten in der Nähe von x_new und Auswahl des Knotens x_min, der die Gesamtpfadkosten vom Startpunkt bis x_new minimiert, als übergeordneten Knoten (Kollisionen müssen vermieden werden).
- Neu verdrahten (RRT*-spezifisch): Suche nach Knoten in der Nähe von x_new. Wenn die Verbindung über x_new die Gesamtkosten des Pfades reduziert, aktualisiere die übergeordneten Knoten dieser Knoten auf x_new.
- Hinzufügen: Fügt x_new und die damit verbundenen Kanten zum Baum hinzu.
- Wiederholen Sie: Fahren Sie fort, bis der Baum bis in die Nähe des Zielgebiets erweitert ist.
AGV-Anwendung:
- Vorteile: Starke Fähigkeit, hochdimensionale Zustände (Pose, Geschwindigkeit usw.) und komplexe Beschränkungen zu handhaben; keine explizite Umgebungskarte erforderlich; probabilistische Vollständigkeit (wenn ein Pfad existiert, wird er schließlich gefunden); RRT hat asymptotische Optimalität.
- Nachteilig: Die Pfade sind nicht unbedingt optimal (es sei denn, es werden unendliche Stichproben verwendet); die Pfade sind möglicherweise nicht glatt (Nachbearbeitung erforderlich); die Leistung hängt von den Parametern ab; die Konvergenz kann langsam sein.
- Dynamische Varianten: z. B. Dynamic RRT, bei dem die Neuplanung durch Entfernen/Aktualisieren von Teilen des Baums erfolgt, die mit dynamischen Hindernissen kollidieren und weiter wachsen.

Praktische Anwendungen der dynamischen Bahnplanung in AGVs
AGV Hindernisvermeidung Anwendungsszenarien
In realen FTS-Anwendungen wird selten ein einzelner Algorithmus allein verwendet, sondern in der Regel eine Kombination von Algorithmen:
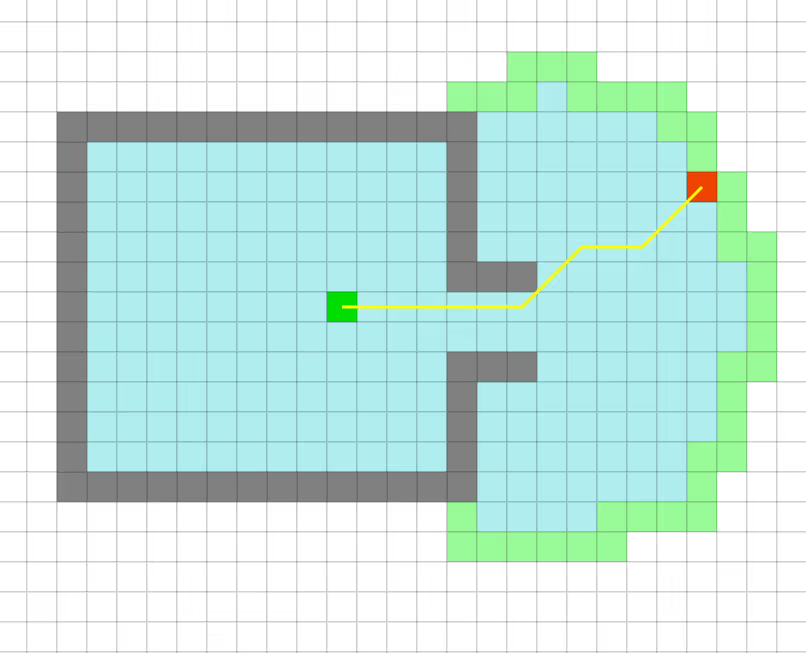
1. Globale Trassenplanung:
Mit Hilfe von A* oder seinen Varianten (z. B. D-Lite) oder manchmal auch einer optimierten Version des Dijkstra-Algorithmus wird ein globaler optimaler oder suboptimaler Weg vom Startpunkt zum Ziel auf einer bekannten Karte geplant. Dieser Weg ist in der Regel ziemlich makroökonomisch.
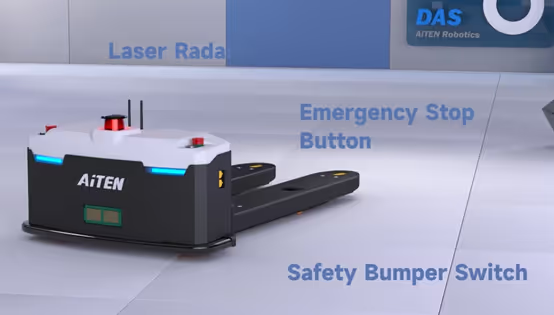
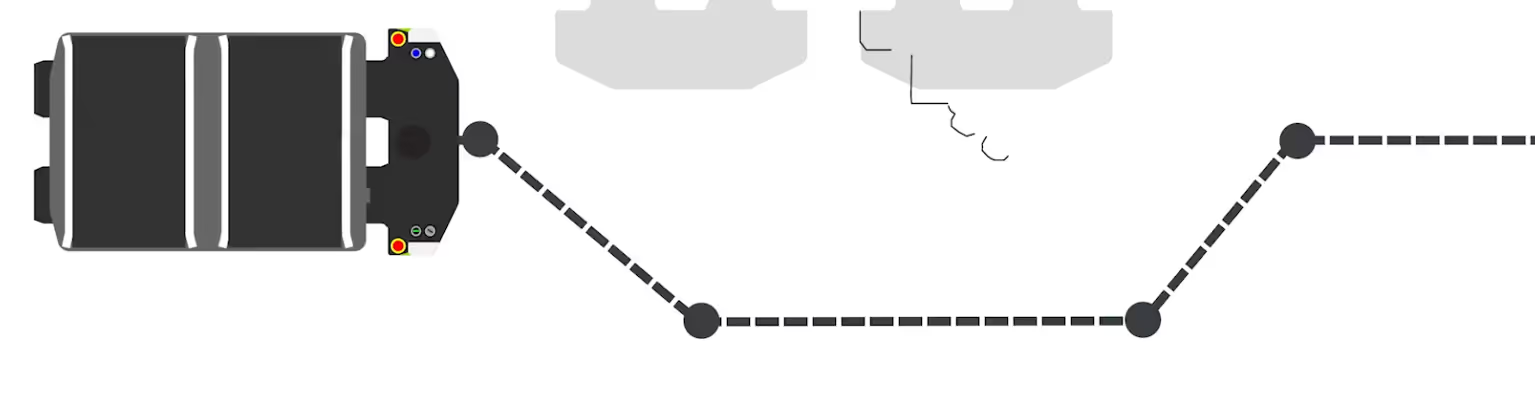
2. Lokale Bahnplanung/Dynamische Hindernisvermeidung:
Während das FTS dem globalen Pfad folgt, nutzt es Sensoren (wie Lidar oder Kameras), um die Umgebung kontinuierlich zu erfassen. Sobald ein unerwartetes (statisches oder dynamisches) Hindernis erkannt wird, greift der lokale Planer (der auf DWA - Dynamic Window Approach, TEB - Timed Elastic Band oder einer Variante von A/RRT mit schneller Neuplanung basieren kann) ein, um einen kurzfristigen, sicheren und auf die Fahrzeugkinematik beschränkten lokalen Pfad zur Hindernisvermeidung unter der Führung des globalen Pfads zu erstellen.

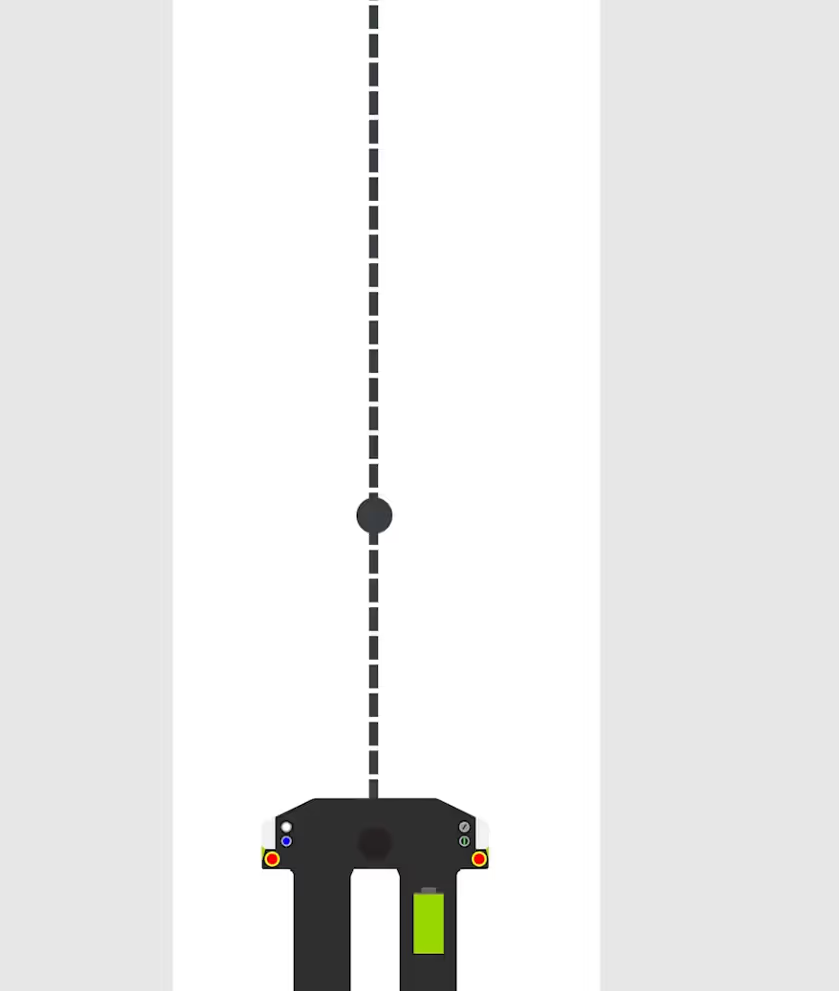
3. Pfadverfolgung:
Der Steuerungsalgorithmus ist dafür verantwortlich, dass das FTS den geplanten Weg (global oder lokal) präzise abfährt.
Diese hierarchische Planungsstrategie stellt ein Gleichgewicht zwischen globaler Optimalität und lokaler Echtzeitleistung her. Algorithmen wie D Lite eignen sich aufgrund ihrer effizienten inkrementellen Neuplanungsfähigkeiten hervorragend für den Umgang mit lokalen dynamischen Veränderungen. RRT und seine Varianten sind dagegen vorteilhafter bei der Handhabung komplexer Umgebungen und Bewegungseinschränkungen.
Herausforderungen und zukünftige Trends
1. Herausforderungen
Trotz erheblicher Fortschritte in der dynamischen Bahnplanungstechnologie gibt es in der FTS-Industrie immer noch Herausforderungen:
- Echtzeit-Anforderungen: Insbesondere im Hochgeschwindigkeitsbetrieb oder bei dichtem Verkehr müssen Algorithmen Berechnungen innerhalb von Millisekunden abschließen.
- Umweltbedingte Unsicherheiten: Sensorrauschen, Positionierungsfehler und Schwierigkeiten bei der Vorhersage dynamischer Hindernisse.
- Multi-AGV-Koordination: Vermeiden Sie Konflikte und Blockaden, um eine effiziente Zusammenarbeit zu erreichen.
- Komplexe kinematische Zwänge: Berücksichtigung von FTS-Größe, Wenderadius und Beschleunigungs-/Verzögerungsleistung.
2. Zukünftige Trends
In Zukunft wird sich die dynamische Wegplanung zu intelligenteren und effizienteren Lösungen entwickeln:
- Integration des maschinellen Lernens: Einsatz von Verstärkungslernen, Nachahmungslernen und anderen Methoden, um FTS in die Lage zu versetzen, selbständig optimale Navigationsstrategien zu erlernen.
- Vorausschauende Planung: Vorhersage der Absichten und Flugbahnen anderer dynamischer Hindernisse (z. B. Fußgänger und Fahrzeuge) zur Vorausplanung.
- Semantisches Verstehen: Ermöglichen Sie es den FTS, semantische Informationen in der Umgebung zu verstehen (z. B. "Bürgersteig" und "Ladezone"), um Entscheidungen zu treffen, die dem Szenario besser entsprechen.
- Mensch-Maschine-Zusammenarbeit: Sicherere und natürlichere Interaktion und Vermeidung in Umgebungen mit Mensch-Maschine-Koexistenz.
Schlussfolgerung
Dijkstra, A, RRT und ihre dynamischen Varianten sind zentrale Werkzeuge in der Bibliothek der Algorithmen für die dynamische Bahnplanung von FTS. Sie dienen als die "intelligenten Augen" und das "dynamische Lenkrad" des FTS und ermöglichen es ihm, sich in komplexen Umgebungen flexibel und effizient zu bewegen. Das Verständnis der Prinzipien und Eigenschaften dieser Algorithmen ist entscheidend für den Fortschritt der FTS-Technologie und der Automatisierung im Allgemeinen. Mit der Weiterentwicklung der Algorithmen und der Verbesserung der Rechenleistung werden zukünftige FTS zweifellos intelligenter, zuverlässiger und effizienter werden.
AiTEN Robotics, mit Hauptsitz in Suzhou, China, ist ein weltweit führender Anbieter von autonomen Industriefahrzeugen (AMR/AGV) und Logistik-Automatisierungslösungen. AiTEN Robotics hat zehn Produktserien entwickelt, um die Anforderungen von umfassenden Materialtransport-Szenarien zu erfüllen. AiTEN Robotics hat mehr als 200 Projekte in über 30 Ländern und Regionen durchgeführt und genießt das Vertrauen zahlreicher Fortune-500-Unternehmen in Branchen wie der Automobilindustrie, der Lebensmittel- und Getränkeindustrie, der chemischen und pharmazeutischen Industrie, der Fertigungsindustrie und der Logistik von Drittanbietern, um die Betriebssicherheit, Effizienz und Zukunftsfähigkeit zu verbessern.

