








Analyse der AGV Pallet Handling Pick-and-Place Path Planning Technologie
_%E7%94%BB%E6%9D%BF%201.avif)
.avif)
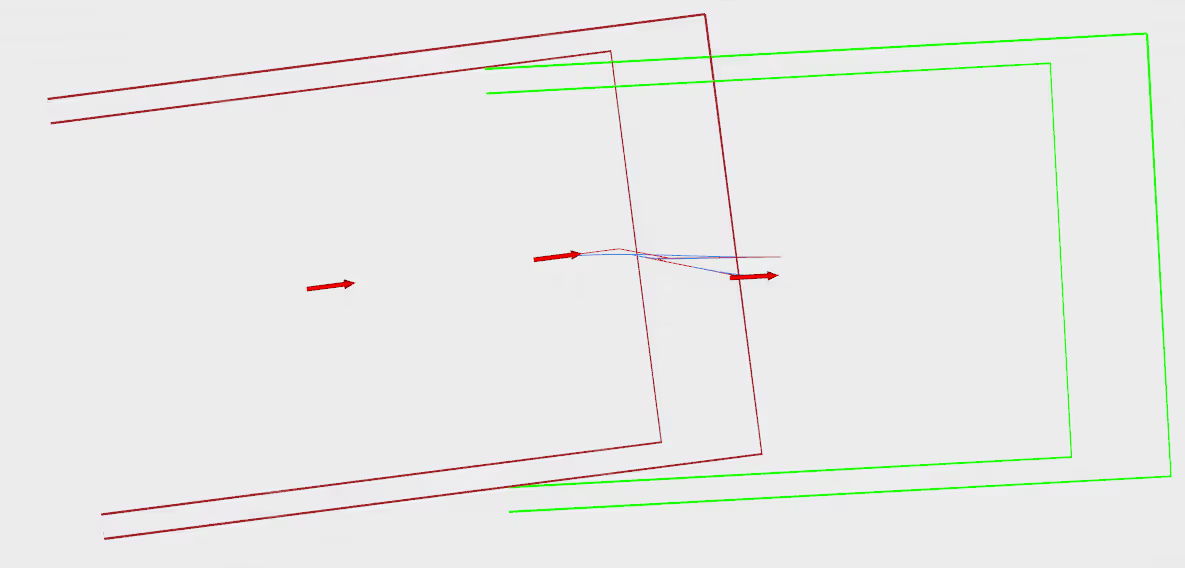
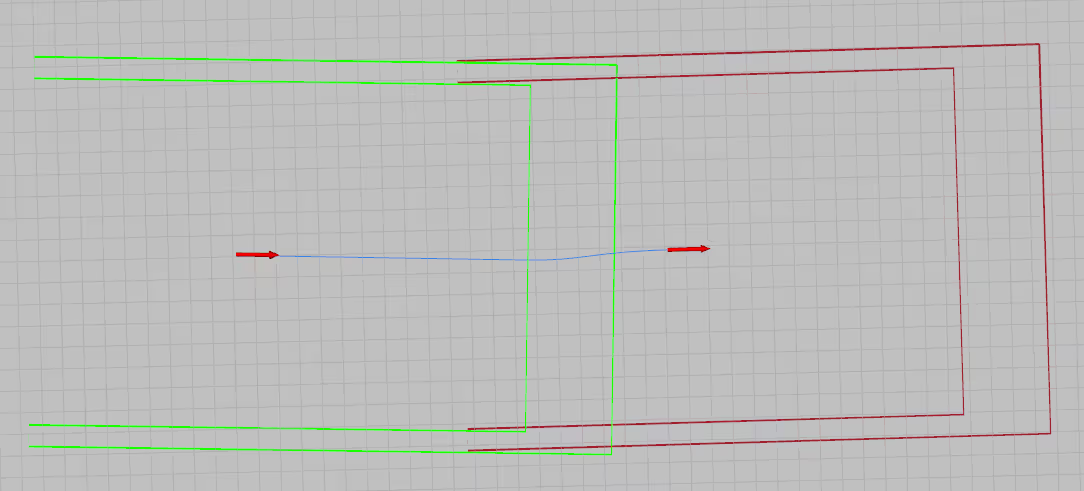
Die präzise Palettenkommissionierung und -platzierung durch FTS beruht auf fortschrittlicher Bahnplanungstechnologie. Die Aufgabe erfordert nicht nur kollisionsfreie Pfade, sondern auch eine hochpräzise Haltung und glatte Trajektorien bei der Annäherung an Paletten. Dieser Artikel analysiert die Kerntechnologien zur Erreichung dieses Ziels, wie z. B. die koordinierte Anwendung von Hybrid-A- und Bézier-Kurven.
Warum erfordert der Palettenumschlag eine spezielle Wegplanung?
Herausforderungen:
- Hohe Präzision am Ende: Die Gabeln müssen zentimeter- bzw. millimetergenau auf die Löcher der Palettengabeln ausgerichtet sein und strenge Anforderungen an die Parkorientierung erfüllen.
- Starke Bewegungseinschränkungen: Strenge Einhaltung der FTS-Abmessungen, Mindestwenderadius und unvollständige Beschränkungen (keine seitliche Bewegung) sind erforderlich, insbesondere in engen Räumen.
- Glatte Bahn: Vermeiden Sie plötzliches Beschleunigen, Abbremsen oder Wenden, um die Stabilität der Ladung und die Betriebssicherheit zu gewährleisten.
- Präzise Hindernisvermeidung im Nahbereich: Bei der Annäherung an Paletten ist eine hochpräzise Abtastung erforderlich, um unbekannte Hindernisse oder Positionierungsfehler zu vermeiden.
Technische Analyse
1. Globale Bahnplanung
Technologie: Dijkstra, Standard A*
Funktion: Schnelles Generieren eines allgemeinen Pfades (zusammenhängend, kostengünstig) vom Startpunkt zum Ablagebereich auf der globalen Gitterkarte.
Merkmale: Schnelle Geschwindigkeit, ignoriert kinematische Details.
2. Endpunkt Feinplanung der Bahn
Kerntechnologie: Hybrid A**
Vorteile: Suche in einem kontinuierlichen Zustandsraum (x, y, θ) und direkte Einbettung von Fahrzeugkinematikmodellen (z. B. Fahrradmodelle).
Auswirkungen: Erzeugt machbare Pfade, die die exakte Zielposition (x, y, θ) erreichen und Beschränkungen wie den Wenderadius einhalten, wodurch komplexe Wendeprobleme auf dem "letzten Meter" gelöst werden.
3. Bahnglättung und Optimierung
Kerntechnologie: Bézier-Kurven
Vorteile: Erzeugt glatte, kontinuierliche Kurven durch Kontrollpunkte, die sicherstellen, dass die Start-/Endpositionen und Richtungen (Tangenten) kontrollierbar sind.
Anwendungen: Glättet die durch die Suche erzeugten Pfade (die oft Winkel enthalten) und gewährleistet eine kontinuierliche Krümmung; verbindet Pfadsegmente; erzeugt Trajektorien mit kontinuierlicher Geschwindigkeit.
Alternative Techniken: B-Splines, NURBS.
4. Hindernisvermeidung und Bahnanpassung in Echtzeit
Technologie: Dynamic Window Algorithm (DWA), Time Elastic Band (TEB), Rapid Replanning.
Funktion: Auf der Grundlage von Sensordaten wird der Pfad/die Geschwindigkeit lokal angepasst, um dynamische Hindernisse zu vermeiden und dabei so nah wie möglich am ursprünglichen optimierten Pfad zu bleiben.
Technologie-Konvergenz
Der Prozess der AGV-Palettenkommissionierung und -platzierung kann wie folgt aussehen.
1. Globale Planung (A*): Planen Sie einen groben Weg vom Startpunkt bis in die Nähe des Palettenbereichs auf der Rasterkarte.
2. Terminal-Planungsschalter: Auslösen der Feinplanung, wenn sich das FTS dem Palettenbereich nähert.
3. Präzises Andocken (Hybrid A*): Planen Sie einen Pfad, der mit der Kinematik der Zielposition (x, y, θ) übereinstimmt.
4. Pfadglättung (Bezier/Spline): Glätten Sie den zusammengefügten Pfad, um einen geometrisch kontinuierlichen Endpfad zu erzeugen.
5. Generierung der Trajektorie: Generierung einer Trajektorie mit Geschwindigkeits-/Beschleunigungsbeschränkungen auf der Grundlage der geglätteten Bahn für den auszuführenden Controller.
6. Hindernisvermeidung in Echtzeit: Überwachen Sie den gesamten Prozess und passen Sie den Weg/die Geschwindigkeit dynamisch an, um Hindernissen auszuweichen.
Herausforderungen
Obwohl die bestehenden Technologien bereits bis zu einem gewissen Grad die Probleme der FTS-Palettenkommissionierung und -platzierung lösen können, gibt es immer noch Herausforderungen und Entwicklungsmöglichkeiten:
- Abwägen zwischen Effizienz und Genauigkeit: Eine detailliertere Planung bedeutet oft höhere Rechenkosten. Die Verbesserung der Planungsgeschwindigkeit bei gleichzeitiger Gewährleistung der Genauigkeit ist ein Bereich, der ständig optimiert werden muss.
- Anpassungsfähigkeit an dynamische Umgebungen: Wie kann man mit beweglichen Hindernissen, wechselnden Palettenpositionen oder Körperhaltungen besser umgehen?
- Sensorfusion und Positionierungsgenauigkeit: Eine hochpräzise Bahnführung setzt eine hochpräzise Echtzeit-Positionierung und Umgebungswahrnehmung voraus.
- Kollaborative Operationen mit mehreren AGVs: Wie lassen sich in dicht besiedelten Kommissionier- und Platzierungsbereichen mehrere FTS für den Betrieb effizient und sicher koordinieren?
- Lernbasierte Methoden: Erforschung des Einsatzes von Verstärkungslernen und anderen Methoden, um FTS in die Lage zu versetzen, selbständig optimale Entnahme- und Platzierungsstrategien und -wege zu erlernen.
Schlussfolgerung
Das präzise Aufnehmen und Ablegen von Paletten durch FTS ist eine komplexe und präzise Aufgabe im Bereich der Automatisierung. Sie beruht nicht auf einer einzigen "Wunderwaffe", sondern vielmehr auf der geschickten Kombination und Koordinierung mehrerer Technologien zur Bahnplanung und -optimierung.
Von der globalen Routenführung bis hin zur kinematischen, wahrnehmungsbasierten Endpunktplanung, die durch Hybrid A* ermöglicht wird, und glatten Trajektorien, die durch Techniken wie Bézier-Kurven erreicht werden, zeichnen diese Technologien gemeinsam einen "intelligenten Weg" für FTS, um sicher, präzise und effizient zu arbeiten und der modernen automatisierten Logistik und Produktion einen starken Impuls zu verleihen. Da die Technologie weiter voranschreitet, haben wir allen Grund zu der Annahme, dass künftige FTS eine noch größere Intelligenz und Flexibilität beim Palettenhandling aufweisen werden.
AiTEN Robotics, mit Hauptsitz in Suzhou, China, ist ein weltweit führender Anbieter von autonomen Industriefahrzeugen (AMR/AGV) und Logistik-Automatisierungslösungen. AiTEN Robotics hat zehn Produktserien entwickelt, um die Anforderungen von umfassenden Materialtransport-Szenarien zu erfüllen. AiTEN Robotics hat mehr als 200 Projekte in über 30 Ländern und Regionen durchgeführt und genießt das Vertrauen zahlreicher Fortune-500-Unternehmen in Branchen wie der Automobilindustrie, der Lebensmittel- und Getränkeindustrie, der chemischen und pharmazeutischen Industrie, der Fertigungsindustrie und der Logistik von Drittanbietern, um die Betriebssicherheit, Effizienz und Zukunftsfähigkeit zu verbessern.

